

MOS 管在无人机电池中的关键应用
描述
无人机,全称为无人驾驶航空器(Unmanned Aerial Vehicle,简称UAV),是一种利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。无人机通过自主飞行控制系统或遥控设备,实现飞行和任务执行。
无人机的分类
1
按用途分类
军用无人机:用于侦察、监视、打击等军事任务。
民用无人机:用于农业、物流、测绘、影视拍摄等领域。
商业无人机:用于快递配送、巡检、安防等商业应用。
2
按飞行方式分类
固定翼无人机:类似传统飞机,依靠机翼产生升力,飞行速度快,航程远。
旋翼无人机:包括直升机型和多旋翼型,利用旋翼产生升力,具有悬停能力,适合低速、精细操作。
垂直起降无人机(VTOL):兼具固定翼和旋翼无人机的特点,能垂直起降,又具备高速巡航能力。
3
按控制方式分类
遥控无人机:由地面操作者通过遥控器实时控制。
自主无人机:根据预先设定的程序或通过传感器和算法实现自主飞行。
无人机的应用
无人机技术的快速发展,使其在多个领域得到广泛应用:农业领域、物流配送、测绘与遥感、影视与媒体、安防与巡检、应急救援、科学研究、军事应用等
无人机电池管理系统BMS
无人机的主要组成部分
机架、电机、螺旋桨、飞行控制器、电子调速器、电池与电源系统、遥控系统、天线、起落架、摄像头和云台(可选)、GPS模块(可选)

电池管理系统BMS
电池作为无人机的主要能源,其管理与维护对于确保无人机的性能、安全性和寿命至关重要。
什么是电池管理系统(BMS)
电池管理系统(BMS)是指用于监测、管理和保护电池组的电子系统。其主要功能是确保电池在安全、可靠和高效的条件下运行。对于无人机而言,BMS负责管理其动力电池,保障无人机的正常飞行和操作。
无人机BMS的组成结构
电池监测单元(BMU)
电压监测:实时测量每个电芯的电压,防止过充电或过放电。
温度监测:通过温度传感器监测电池的温度,防止过热或过冷。
电流监测:测量充放电电流,确保电流在安全范围内。
通信模块
有线通信接口:如CAN总线、I2C、SPI或UART,用于与飞控系统实时交换数据。
无线通信模块(可选):通过无线方式传输电池信息,方便远程监控。
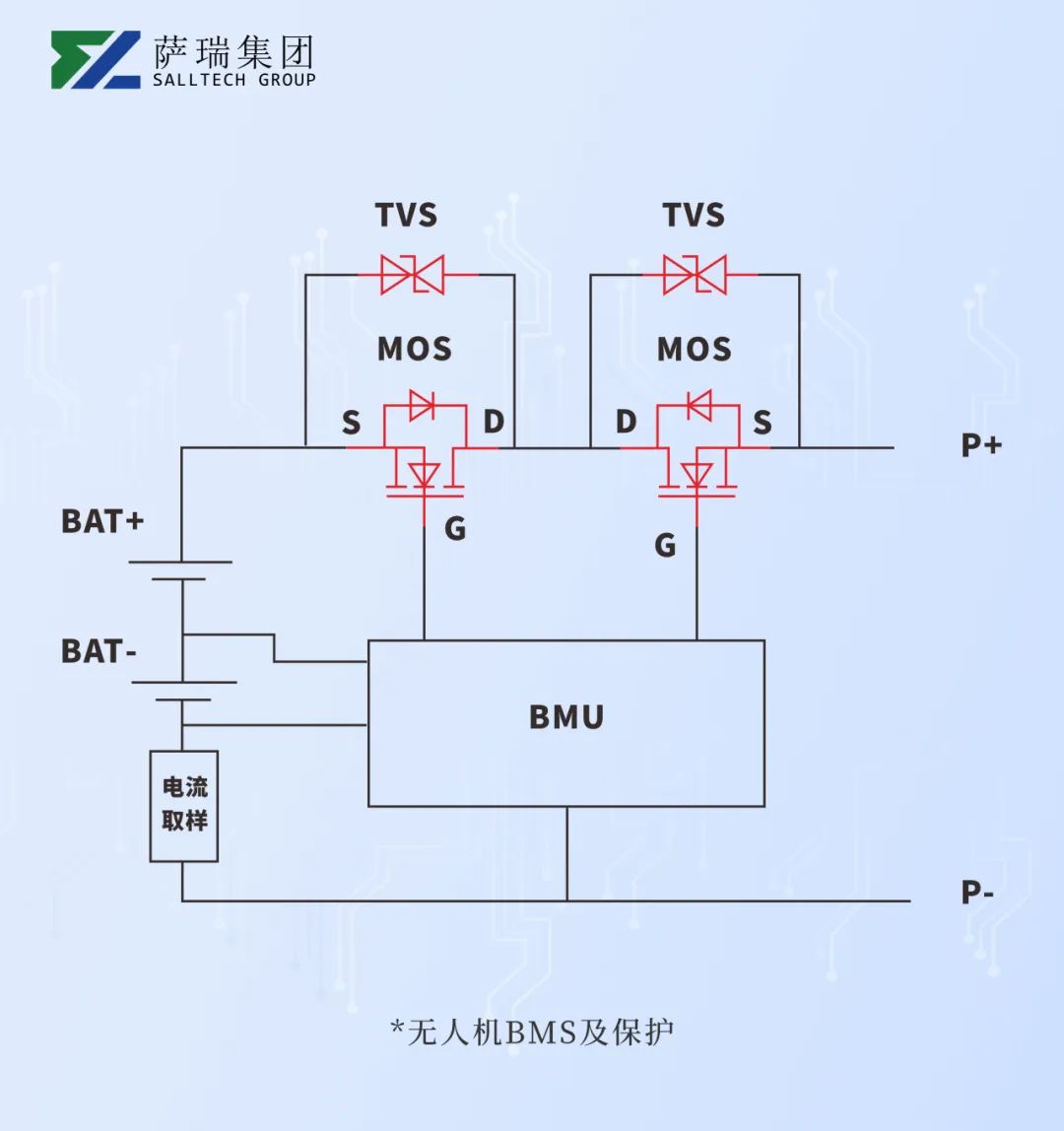
功率控制模块
图中有二组MOSFET模块,分别用于控制放电、充电和预充电。
放电MOS:控制电池放电电流的通断。当需要放电时,控制信号使放电MOS导通。
充电MOS:控制电池的充电电流的通断。类似放电MOS,当需要充电时,控制信号使充电MOS导通。
预充电MOS:预充电是为了在充电开始时防止瞬时大电流对电池或电路造成损坏。它通过限流电阻慢慢对电池充电,直到电压达到安全范围。
推荐使用萨瑞微MOSFET系列

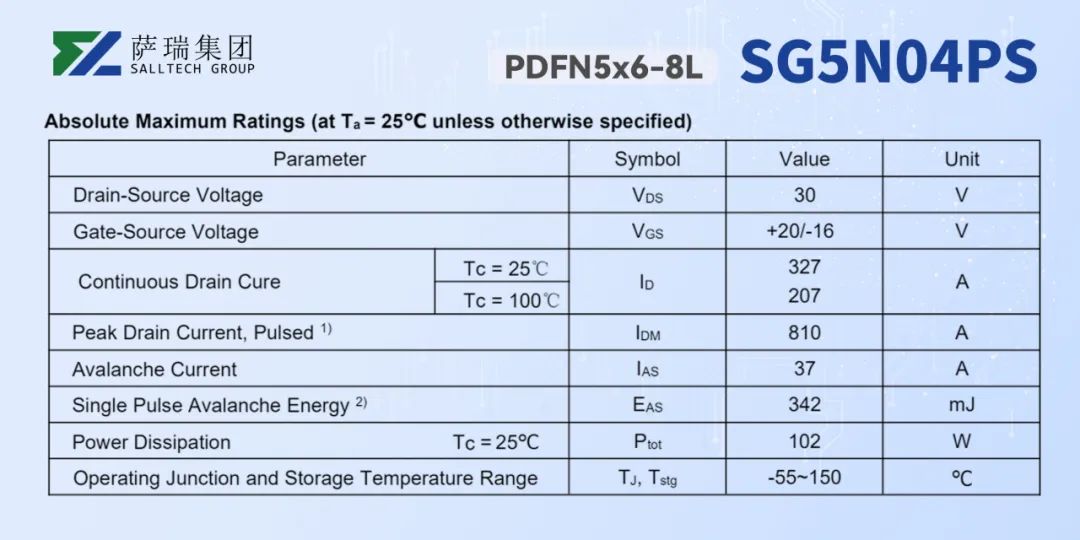
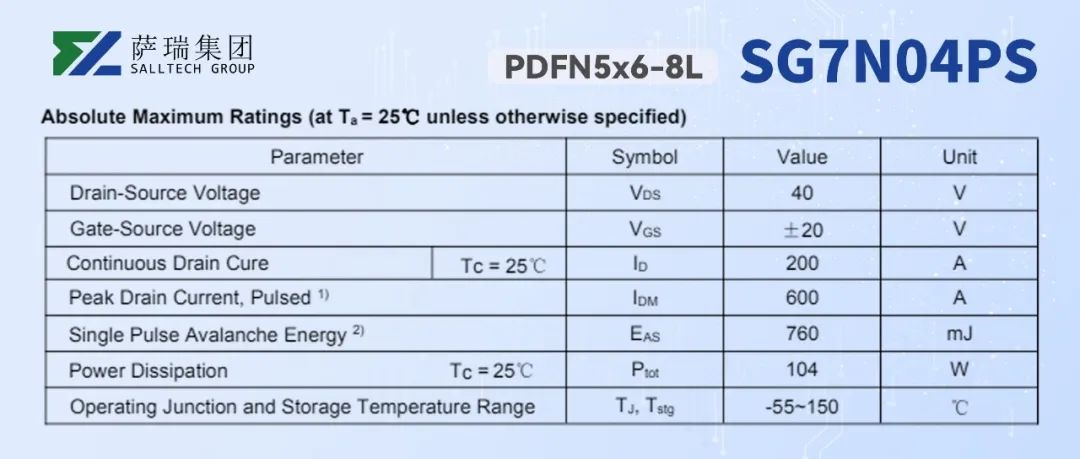
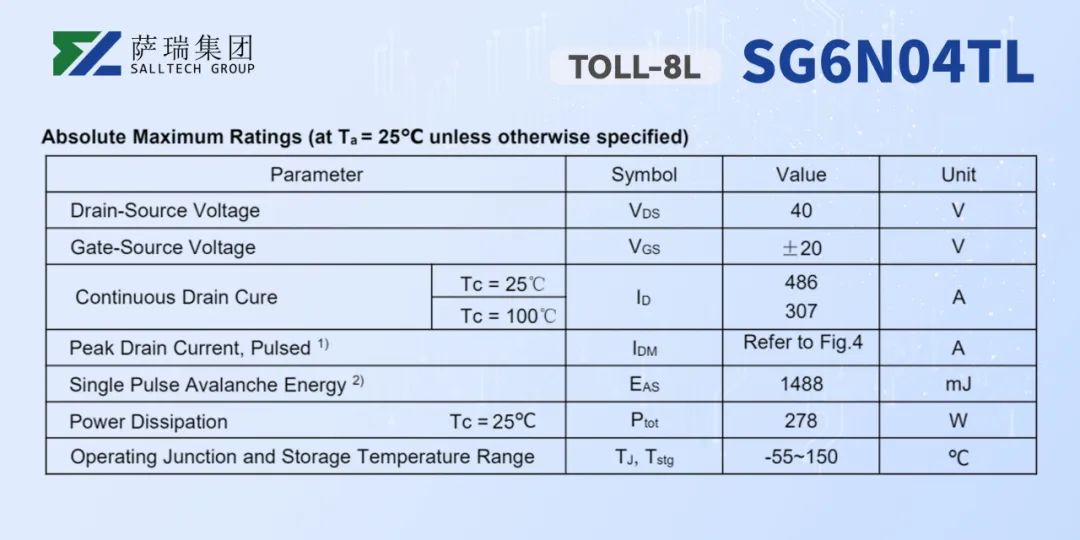
这二组MOS开关器件的选择需要根据系统的功率需求以及电池组的额定电流来进行设计。常见的参数包括:
导通电阻Rds(on):开关导通时的内阻,Rds(on)越小,损耗越低。
最大电流承受能力:MOS管的额定电流要大于最大充放电电流。
耐压值Vds:选择时需要考虑最大电池电压,MOS管的耐压值应大于电池组的总电压。
电流检测
电流采样电阻:放电路径中的采样电阻用于测量流经电池组的电流。通过测量电阻上的压降,可以得到当前电流值。电阻的选择需要考虑:
阻值:通常选择低阻值(如毫欧级)以减少功率损耗。
功率额定值:需要能够承受较大的电流,防止烧毁。
隔离电源模块
DC/DC隔离电源模块:由于BMS的不同电路部分工作在不同电压层次下,为了实现隔离,同时确保不同电压的稳定供电,通常需要使用DC/DC转换器。它的选择主要考虑以下参数:
输入电压范围:要支持电池组的电压范围。
输出电压和电流:要满足控制电路的供电需求。
控制单元(MCU)
数据处理:收集并处理来自监测单元的数据。
逻辑控制:根据电池状态执行相应的控制策略,如开启保护功能。
通信管理:与无人机飞控系统或地面站进行数据通信。
安全机制
保险丝:在极端过流情况下切断电路,提供最后的安全保障。
电气隔离:通过光耦合器或隔离变压器,实现电路间的电气隔离,提升系统安全性。
温度保护与检测
温度开关和MOSFET:用于监控电池组的温度,当温度过高时,它会触发保护机制,关闭充电或放电回路,防止电池过热损坏。温度开关一般选择能在设定的温度点上准确动作的器件,MOSFET则用于控制保护电路的通断
结论
无人机BMS通过硬件和软件的结合,对电池进行全面的监测和管理。其主要功能是确保电池的安全使用,延长电池寿命,提高无人机的续航能力和运行可靠性。在设计上,需要考虑无人机的特殊需求,如轻量化、体积小、功耗低和抗干扰能力强。同时,随着无人机技术的发展,BMS也在不断升级,集成更多智能化和网络化功能,支持远程监控、数据分析和云端管理。
-
无人机电路防护2017-05-09 4715
-
无人机电池使用前后注意事项有哪些?2017-09-19 9722
-
无人机突破性的电池管理设计2018-06-26 5363
-
什么因素会影响ovonic无人机电池的寿命呢?2018-09-29 4803
-
无人机电源最优管理方案2018-10-11 3027
-
德州仪器全新参考设计改善无人机飞行时间和电池寿命2019-03-26 3035
-
多轴无人机BLDC驱动解决方案2020-07-02 3424
-
如何更好地保养无人机电池2020-06-10 4764
-
无人机电池的参数规格了解2020-09-30 18440
-
基于机智云物联网平台的无人机电池电量监测系统2022-01-24 2733
-
植保无人机电池维护保养2023-03-07 3183
-
无人机电池充不进电的原因 无人机电池充不进电怎么办2024-03-12 8008
-
植保无人机电池性能测试方法2025-01-08 2217
-
植保无人机电池的选择和保养策略2025-01-15 1994
-
无人机电池通讯接口应用:CANFD工业级芯片的选型与技术要点2025-07-24 1342
全部0条评论

快来发表一下你的评论吧 !
