

ir2110驱动mos管详解
芯片引脚图
描述
mos管简介
mos管是金属(metal)—氧化物(oxide)—半导体(semiconductor)场效应晶体管,或者称是金属—绝缘体(insulator)—半导体。MOS管的source和drain是可以对调的,他们都是在P型backgate中形成的N型区。在多数情况下,这个两个区是一样的,即使两端对调也不会影响器件的性能。这样的器件被认为是对称的。
双极型晶体管把输入端电流的微小变化放大后,在输出端输出一个大的电流变化。双极型晶体管的增益就定义为输出输入电流之比(beta)。另一种晶体管,叫做场效应管(FET),把输入电压的变化转化为输出电流的变化。FET的增益等于它的transconductance,定义为输出电流的变化和输入电压变化之比。市面上常有的一般为N沟道和P沟道,详情参考右侧图片(N沟道耗尽型MOS管)。而P沟道常见的为低压mos管。
mos管主要参数
1.开启电压VT
·开启电压(又称阈值电压):使得源极S和漏极D之间开始形成导电沟道所需的栅极电压;
·标准的N沟道MOS管,VT约为3~6V;
·通过工艺上的改进,可以使MOS管的VT值降到2~3V。
2.直流输入电阻RGS
·即在栅源极之间加的电压与栅极电流之比
·这一特性有时以流过栅极的栅流表示
·MOS管的RGS可以很容易地超过1010Ω。
3.漏源击穿电压BVDS
·在VGS=0(增强型)的条件下,在增加漏源电压过程中使ID开始剧增时的VDS称为漏源击穿电压BVDS
·ID剧增的原因有下列两个方面:
(1)漏极附近耗尽层的雪崩击穿
(2)漏源极间的穿通击穿
·有些MOS管中,其沟道长度较短,不断增加VDS会使漏区的耗尽层一直扩展到源区,使沟道长度为零,即产生漏源间的穿通,穿通后,源区中的多数载流子,将直接受耗尽层电场的吸引,到达漏区,产生大的ID
4.栅源击穿电压BVGS
·在增加栅源电压过程中,使栅极电流IG由零开始剧增时的VGS,称为栅源击穿电压BVGS。
5.低频跨导gm
·在VDS为某一固定数值的条件下,漏极电流的微变量和引起这个变化的栅源电压微变量之比称为跨导
·gm反映了栅源电压对漏极电流的控制能力
·是表征MOS管放大能力的一个重要参数
·一般在十分之几至几mA/V的范围内
6.导通电阻RON
·导通电阻RON说明了VDS对ID的影响,是漏极特性某一点切线的斜率的倒数
·在饱和区,ID几乎不随VDS改变,RON的数值很大,一般在几十千欧到几百千欧之间
·由于在数字电路中,MOS管导通时经常工作在VDS=0的状态下,所以这时的导通电阻RON可用原点的RON来近似
·对一般的MOS管而言,RON的数值在几百欧以内
7.极间电容
·三个电极之间都存在着极间电容:栅源电容CGS、栅漏电容CGD和漏源电容CDS
·CGS和CGD约为1~3pF
·CDS约在0.1~1pF之间
8.低频噪声系数NF
·噪声是由管子内部载流子运动的不规则性所引起的
·由于它的存在,就使一个放大器即便在没有信号输人时,在输出端也出现不规则的电压或电流变化
·噪声性能的大小通常用噪声系数NF来表示,它的单位为分贝(dB)
·这个数值越小,代表管子所产生的噪声越小
·低频噪声系数是在低频范围内测出的噪声系数
·场效应管的噪声系数约为几个分贝,它比双极性三极管的要小
ir2110驱动mos管详解
一、电机驱动模块设计
1、H桥工作原理及驱动分析
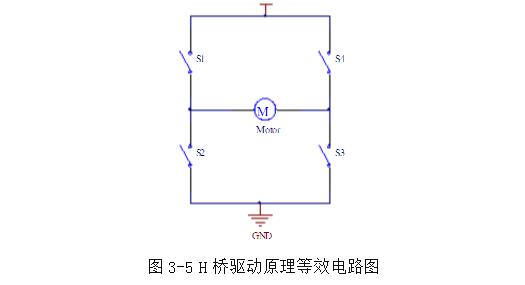
要控制电机的正反转,需要给电机提供正反向电压,这就需要四路开关去控制电机两个输入端的电压。H桥驱动原理等效原理图图如图3-5所示,当开关S1和S3闭合时,电流从电机左端流向电机的右端,设此时的旋转方向为正向;当开关S2和S4闭合时,电流从电机右端流向电机左端,电机沿反方向旋转。
常用可以作为H桥的电子开关器件有继电器,三极管,MOS管,IGBT管等。普通继电器属机械器件,开关次数有限,开关频率上限一般在30HZ左右,而且继电器内部为感性负载,对电路的干扰比较大,但继电器可以把控制部分与被控制部分分开,实现由小信号控制大信号,所以高压控制中一般会用到继电器。三极管属于电流驱动型器件,设基极电流为IB,集电极电流为IC,三极管的放大系数为β,电源电压VCC,集电极偏置电阻RC,如果IB*β》=IC,则三极管处于饱和状态,可以当作开关使用,集电极饱和电流IC=VCC/RC,由此可见集电极的输出电流受到RC的限制,不适合应用于电流要求较高的场合。MOS管属于电压驱动型器件,对于NMOS来说,只要VDS≥VGS-VT即可实现NMOS的饱和导通,MOS管开启与关断的能量损失仅是对栅极和源极之间的寄生电容的充放电,对MOS管驱动端要求不高,同时MOS端可以做到很大的电流输出,因此一般用于需要大电流的场所。IGBT则是结合了三极管和MOS管的优点制造的器件,一般用于高压控制电路中。综合考虑,本设计选用了4只NMOS管IRF3205组成H桥,其具有导通电阻RDS小,官方数据手册显示仅为8.0毫欧,电流ID可以达到110A等优点。NMOS组成的H桥模型如图3-6所示。
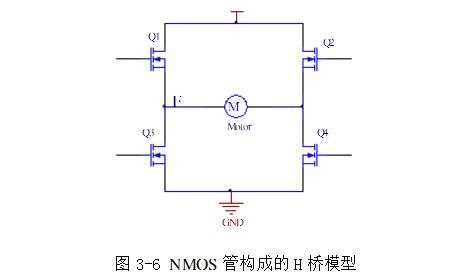
结合图3-6来分析讨论H的驱动问题。首先分析由Q1和Q4组成的通路,当Q1和Q4关断时,F点的电位处于“悬浮”状态,即不确定电位,Q2和Q3也关断。在打开Q4之前,先打开Q1,给Q1的G极12V的电压,由于F点“悬浮”状态,则F点可以是任何电平,不能保证前面说的栅极电压高于源极电压,这样可能导致Q1打开失败;在打开Q4之后,尝试打开Q1,在Q1打开之前,F点为低电位,给Q1的G极加上12V电压,Q1打开,由于Q1饱和导通,F点的电平等于电源电压,此时Q1的G极电压小于Q1的S极电压,Q1关断,Q1打开失败。Q2和Q3的情况与Q1和Q4相似。要打开由NMOS构成的H桥的上管,必须处理好F点(也就是上管的S极)的“悬浮”问题。由于NMOS的S极一般接地,所有构成H桥的上管S极称为“浮地”。要使上管NMOS饱和打开,必须使上管的G极相对于浮地有10-15V的电压差,所以本设计采用IR2110悬浮驱动NMOS管方案,可以有效的解决上管的S极的“悬浮”问题[1]。3.3.2前级PWM信号和方向控制信号逻辑处理电路设计分析
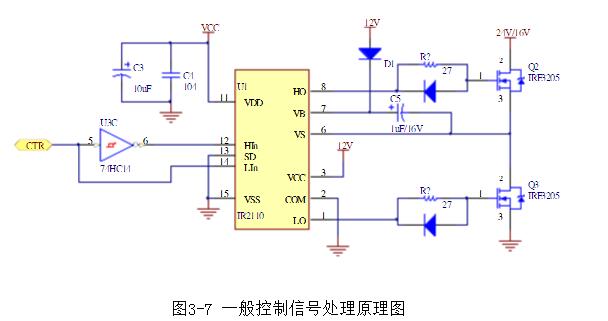
由于H桥控制MOS管的开关需要4路控制信号,对于由NMOS管组成H桥的一侧而言,一般情况下,上下两管共用一个控制信号,并且其中一只NMOS管的控制信号是将共用的控制信号反向得到的,如图3-7所示,74HC14的作用是将输入的控制信号反向作为下管的控制信号,从而保证上下两个MOS管不会同时导通,那么对于一个完整的H桥就要2路PWM信号来控制电机的速度和正反转,而且两路PWM信号还必须保证同步且极性相反,对于低端单片机而言这一点不是很容易做到。
2、前级PWM信号和方向控制信号逻辑处理电路设计分析
由于H桥控制MOS管的开关需要4路控制信号,对于由NMOS管组成H桥的一侧而言,一般情况下,上下两管共用一个控制信号,并且其中一只NMOS管的控制信号是将共用的控制信号反向得到的,如图3-7所示,74HC14的作用是将输入的控制信号反向作为下管的控制信号,从而保证上下两个MOS管不会同时导通,那么对于一个完整的H桥就要2路PWM信号来控制电机的速度和正反转,而且两路PWM信号还必须保证同步且极性相反,对于低端单片机而言这一点不是很容易做到。
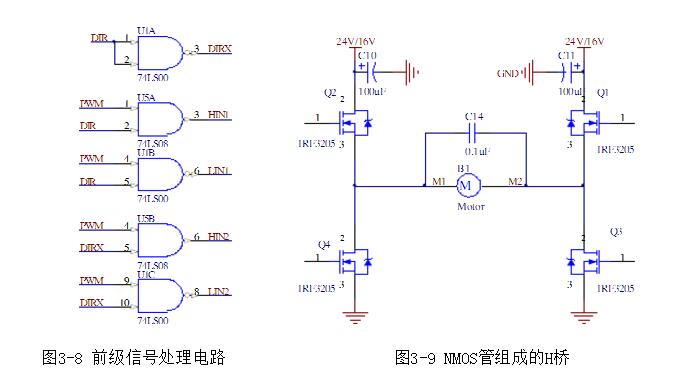
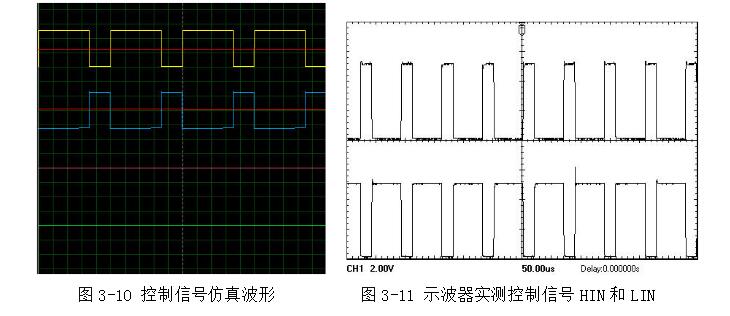
本设计在上面所述的思想上做了改进和延伸,通过一路PWM信号、一路DIR方向控制信号、74HC00、74HC08数字芯片,实现四路控制信号的输出,上下两管的逻辑控制信号具有有互锁保护功能,从而保证同侧桥臂的上下NMOS管不会同时导通造成能量浪费甚至烧毁MOS管和电源。如图3-8所示,HIN1、LIN1、HIN2、LIN2分别为两侧上下管的控制信号,HIN1、LIN1不能同时为1,HIN2、LIN2不能同时为1。DIR=1时,电机正转,DIR=0时,电机反转。当DIR=1正转时,LIN2恒为1,图3-9中Q3始终导通,HIN1、LIN1通过PWM控制导通时间调节转速,当DIR=0反转时,LIN1恒为1,图3-9中Q4始终导通,HIN2、LIN2通过PWM控制导通时间调节转速。DIR=0或1,两桥臂下管始终导通,这也为自举电容的快速充电提增加了一条回路,也就是说不管是正转还是反转,当上管关闭时两侧下管可同时提供充电回路,而不是单侧的下管,因为电机阻抗的存在,起主要充电作用的还是单侧的下管。当PWMZ占空比为0时,LIN1、LIN2都为1时,两侧下管同时导通将电机两端接地,这样可以实现电机快速制动。当DIR=1时,HIN、LIN控制信号仿真图和实际波形分别如图3-10和图3-11所示。
3、IR2110介绍及悬浮驱动电路设计分析
IR2110是美国IR推出的大功率MOSFET和IGBT专用驱动集成电路,已在电源变换、马达调速等功率驱动领域中获得了广泛的应用。该电路芯片体积小,集成度高,响应快,偏值电压高,驱动能力强,内设欠压封锁,而且其成本低,易于调试,并设有外部保护封锁端口。尤其是上管驱动采用外部自举电容上电,使得驱动电源数目较其他驱动IC大大减小。对于4管构成的H桥电路,采用2片IR2110驱动2个桥臂,仅需要一路10-20V电源。
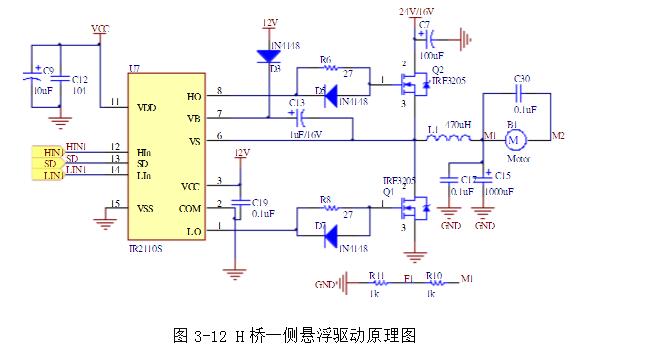
如图3-12所示为一侧桥臂悬浮自举电路,两侧对称电路见附录。C13为自举电容,当低压输出端打开(LIN=1)、高压输出端关闭(HIN=0)时,低压侧12V电源电压经D3、C13、负载、Q4和另一侧Q3给C13充电,当低压输出端关闭(LIN=0)、高压输出端打开(HIN=1)时,Q2管的栅极靠C13上足够的储能来驱动,从而在逻辑信号的控制下循环往复,从而实现NMOS管的悬浮自举驱动。若负载阻抗较大,自举电容经负载降压充电较慢,使得Q4关断、Q2开通时,自举电容上的电压仍充电达不到自举电压8.3V以上时,输出驱动信号会因欠压被逻辑封锁,Q2就无法正常工作。所以,要么选用小容量电容,以提高充电电压;要么为自举电容提供快速充电通路。
由于Q4每开关一次,C13就通过Q4充电一次,因此自举电容C13的充电还与输入信号HIN、LIN的PWM脉冲频率和占空比有关,当PWM工作频率过低时,若Q2导通脉宽较窄,自举电压8.3V容易满足;反之无法实现自举。因此要合理设置PWM开关频率和占空比调节范围,并且PWM的占空比不能达到100%,否则无法给自举电容充电,也就无法自举驱动。通过实验自举电容和自举二极管的选择应考虑以下几点:
(1)自举电容的选择与PWM的频率有关,频率高,自举电容应该选择小一点的;
(2)自举电容的种类最好是钽电容,本设计选用的是1uF的钽电容和一只0.1uF的独石电容并联;
(3)尽量使自举回路上不经过大阻抗负载,这样就要为自举电容充电提供快速充电通路;
(4)对于占空比调节较大的场合,特别是在高占空比时,Q4开通时间较短,自举电容应该选择小点的;
(5)自举二极管能阻断直流干线上的高压,二极管承受的电流是栅极电荷与开关频率之积。为了减少电荷损失,应选用漏电流小的快恢复二极管(高频),本设计选用的是IN4148。
由于驱动器和MOSFET栅极之间的引线、地回路的引线等所产生的电感,以及IC和FET内部的寄生电感,在开启时会在MOSFET栅极出现振铃现象,一方面增加MOSFET的开关损耗,同时EMC方面不好控制。在MOSFET的栅极和驱动IC的输出之间串联一个电阻,如图3-12中R6、R8,这个电阻称为“栅极电阻”,其作用是调节MOSFET的开关速度,减少栅极出现的振铃现象,减小EMI,也可以对栅极电容充放电起限流作用。该电阻的引入减慢了MOS管的开关速度,但却能减少EMI,使栅极稳定。同时MOS管的关断时间要比开启时间慢(开启充电,关断放电),因此就要改变MOS管的关断速度,可以在栅极电阻上反向并联一个二极管,如图3-12中D5、D7,当MOS管关断时,二极管导通,将栅极电阻短路从而减少放电时间,使MOS管实现快速放电,确保上下桥臂MOS管不会同时导通。
因电机是感性负载,在H桥的输出端、正极到电机外壳、负极到电机外壳分别接一个0.1uF的小电容,可以起到换向时消除火花的作用保护电机。同时在局部供电部分加一个去藕电容以保证电源稳定,如图3-12中C7。
驱动模块在设计时除考虑到做电机驱动用,还可以扩展应用为直流数控电源,如图3-12所示,做电机驱动时电感L1用导线短接,C15、C17、R10、R11空缺不管,当做直流数控电源电感L1、C15、C17组成LC滤波电路,对脉冲信号进行滤波,同时电感L1还起着续流储能作用,R10、R11构成反馈回路,将实时电压信号反馈给MCU,MCU再控制PWM信号的输出,这样可以实现闭环的数控电源。
二、系统电源电路设计分析
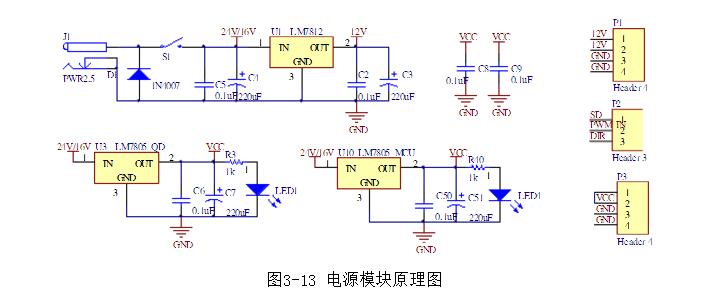
本系统所需的电源有5V、12V、16V,其中5V用于单片机、液晶、驱动芯片,12V用于IR2110S驱动芯片的低端电源电压,16V是电机驱动电源,整个系统采用16V供电。5V和12V分别采用78M05和78M12三端稳压芯片经过16V稳压提供。78MXX三端稳压集成芯片芯片采用TO-252DPAK封装,最大输出电流500mA,满足系统要求。78MXX最大输入电压35V,具有过流过热短路保护功能。由于5V由16V稳压得到,压差较大△U=16-5=11V,假如系统5V电源输出电流I≈300mA,将会导致大量的能量浪费,△P=△U*I≈3.3W,所以为降低能量损耗,保护稳压芯片延长使用寿命,本设计将驱动电路5V电源和单片机及LCD显示部分5V电源分开,分别用一片78M05供电,同时取消LCD背光功能,以减小电流降低功耗。电源模块电路原理图如图3-13所示。
-
详解高压悬浮驱动电路IR2110的特点及拓展应用技术2021-04-08 24041
-
请教一下用IR2110,自举驱动mos管的问题2018-03-22 8630
-
ir2110驱动工作原理_IR2110的特点和内部功能图及应用电路图2018-03-04 228017
-
基于IR2110的H桥可逆PWM驱动电路应用2017-12-21 65538
-
IR2110驱动2017-03-25 4946
-
IR2110原理介绍2016-04-28 2861
-
IR2110驱动mos2016-03-27 14084
-
IR2110驱动逆变桥2015-06-05 6657
-
IR2110问题2014-08-14 2270
-
IR2110驱动电路的优化设计2010-12-30 1855
-
IR2110的应用2010-06-12 1921
-
带电平钳位功能的IR2110驱动电路2010-02-18 1399
-
高压悬浮驱动器IR2110的原理和扩展应用2009-07-09 3921
-
ir2110应用电路2008-12-03 8642
全部0条评论

快来发表一下你的评论吧 !
