

基于空谱特征优化选择的高光谱激光雷达地物分类
电子说
描述
随着遥感探测场景的不断扩展,探测目标也变得多样化与复杂化,如何利用高光谱激光雷达技术快速精确地实现复杂场景下的地物精细化分类变得愈发迫切。
一、引言
激光雷达技术作为一种重要的对地观测技术手段,凭借其可快速高效获取地物目标三维空间信息的优势特点,在地物分类、森林管理、资源调查、城市三维建模等诸多领域发挥着越来越重要的作用。随着遥感探测领域的不断拓展与深化,如何实现激光雷达在复杂场景下的地物目标高精度识别分类已成为遥感技术发展的重要方向。然而,传统激光雷达技术大多采用单波长激光进行探测,该波长并不属于地物敏感波长,且构建的空谱特征也相对较为简单,对复杂场景下的地物分类能力提升有限。
高光谱激光雷达技术作为一种新型的主动式遥感探测手段,可将被动高光谱成像技术与激光雷达技术优势合二为一,该技术可有效避免高光谱影像与激光雷达点云数据匹配融合带来的偏差,并且不受太阳照射、采集时间不一致等因素的影响。高光谱激光雷达技术凭借地物目标空谱一体化成像探测优势,可为复杂场景下的地物精细化分类提供一种重要思路。随着遥感探测场景的不断扩展,探测目标也变得多样化与复杂化,如何利用高光谱激光雷达技术快速精确地实现复杂场景下的地物精细化分类变得愈发迫切。然而,针对高光谱激光雷达构建的空谱特征选择研究较少,如何确定并提取最优空谱特征对于高光谱激光雷达在复杂场景下的地物精细化分类至关重要。
二、高光谱激光雷达系统扫描探测实验
为验证高光谱激光雷达技术在复杂场景下地物分类的可行性与准确性,本文对室内14类不同颜色的地物进行三维扫描探测,并同时获取地物丰富的光谱信息与三维空间信息。此外,为了有效地降低外界杂散光与大气效应的影响,该扫描实验在黑暗且干净的实验室内进行。扫描实验场景主要由14类地物组成:1)卡纸;2)虎皮兰;3)陶瓷花盆;4)纸箱;5)塑料台灯;6)铁制水杯;7)陶瓷水杯;8)胶带;9)木盒;10)发财树树叶;11)发财树树干;12)塑料桶、陶瓷胡萝卜;13)塑料桶浅色部分;14)塑料桶深色部分。具体扫描实物场景如图2所示。扫描目标除植被类型之外,还包括多种不同的人造材料。不同的地物具有不同的光谱与空间信息,并且地物空间摆放位置相对比较复杂,这也对高光谱激光雷达精细化地物分类造成一定困扰。

图214类不同地物扫描场景
三、空谱特征提取与特征优化选择
3.1基于空谱特征优化选择的地物分类方法流程
高光谱激光雷达可实现对目标高空间分辨率与高光谱分辨率的一体化遥感探测,在地物精细化分类领域将发挥巨大优势。本文提出地物分类方法流程如图3所示。
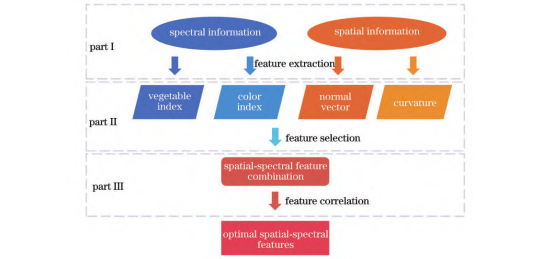
图3基于空谱特征优化选择的高光谱激光雷达地物分类方法流程
3.2基于波段优化的光谱指数特征提取
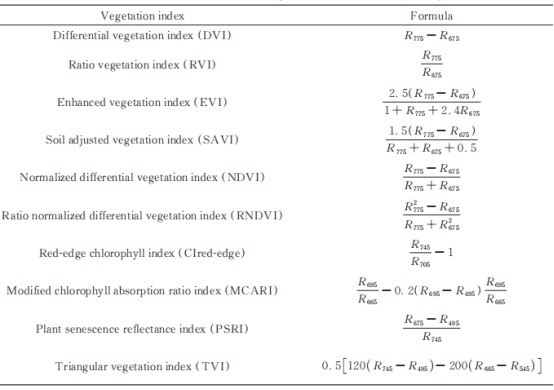
按照植被指数构建方式,植被指数总体可分为三种类型:基于经验方法、数理方法、新型遥感光谱构建,三种构建方式在不同的应用场景中各具优势。本文采用光谱波段优化方式,根据波段相似性原则,选择邻近且相关性较高的波段代替原有波段。考虑到本次扫描场景的复杂性与植被指数的适用性,本文基于高光谱激光雷达光谱信息构建了10种适用于地物分类的植被指数,R775表示中心波长为775nm处的光谱反射率。
表110种光谱指数的具体信息。
此外,颜色指数也是一种重要的光谱指数,是通过对红绿蓝(RGB)值进行线性或者非线性组合从而实现对地物分类识别的重要特征。而高光谱激光雷达可在可见光范围内获取丰富的光谱信息,可为地物真彩色重建提供技术支持。然而,由于超连续激光器与探测器硬件性能的制约,无法获取完整的可见光光谱,导致颜色重建存在一定程度的颜色失真现象。图4为基于最佳波段组合真彩色重建结果。基于颜色重建的RGB值,本文构建了11种适用于高光谱激光雷达地物分类的颜色指数,其中R、G、B分别表示重建RGB值的三个颜色分量。
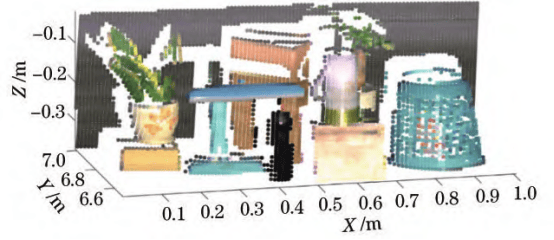
图4基于最佳波段组合的真彩色重建结果
表211种颜色指数的具体信息
3.3基于区域增强的空间特征
提取空间特征是用于表达地物空间几何特性的重要指标,也是表述地物空间几何位置形态的重要属性。为实现高精度地物分类,本文基于局部邻域表面拟合构建了可实现区域增强的法向量与曲率的两种几何特征,两者可直观地表述目标几何属性,特别是在几何空间复杂区域更加明显,可提高地物识别能力。
目前点云法向量计算可概括为三种类型:局部表面拟合法、Delaunay/Voronoi法以及鲁棒统计法。由于局部表面拟合法方便简单计算量小,因此本文基于高光谱激光雷达高精度空间扫描点云数据,通过局部表面拟合法进行点云法向量计算。局部表面拟合法算法实现是假设采样平面都是光滑的,局部邻域都可以通过采样平面进行比较好的拟合。本文法向量计算基于主成分分析(PCA)方法实现,通过采样点局部邻域拟合局部最小二乘平面,使得采样点局部邻域的所有点距离此平面距离的和最小,该平面法向量即为采样点的法向量。
3.4空谱特征选择优化方法
本文在构建光谱指数与空间特征的基础上,采用空谱特征选择优化方法,确定最优空谱特征组合,可有效消除特征冗余,提高地物分类精度。该空谱特征选择优化方法主要是基于海洋捕食者算法与特征相关性分析实现的。海洋捕食者算法具有设计变量数量少、计算负担小、收敛速度快、近似全局解等优点,已被成功应用于光伏、电力等多个领域。海洋捕食者算法可提取最有效的空谱特征,但提取的空谱特征之间可能存在较强的相关性,一方面相关性较高的特征会放大分类噪声,且多个特征会“平分”该类特征对分类模型的贡献,导致模型对特征的变动更加敏感,泛化误差增加,另一方面会造成一定程度上的特征冗余问题,影响计算效率。为此,本文联合海洋捕食者算法与特征相关性分析,进一步消除相关性较高的空谱特征,最终确定最优空谱特征组合实现高精度地物分类。
3.5分类策略与分类方法
为进一步探究高光谱激光雷达技术在复杂场景下地物分类应用中的优势以及时间效率问题,本文将多个空谱特征按照不同组合方式分成6种分类策略。策略1:基于高光谱激光雷达获取的原始32通道光谱信息与高程值用于地物分类;策略2:基于波段优化的光谱指数特征提取用于地物分类;策略3:基于区域增强的几何特征提取用于地物分类;策略4:联合32通道光谱信息、高程值、光谱指数、空间特征用于地物分类;策略5:基于海洋捕食者算法选择的空谱特征组合用于地物分类;策略6:基于最优空谱特征组合用于地物分类。
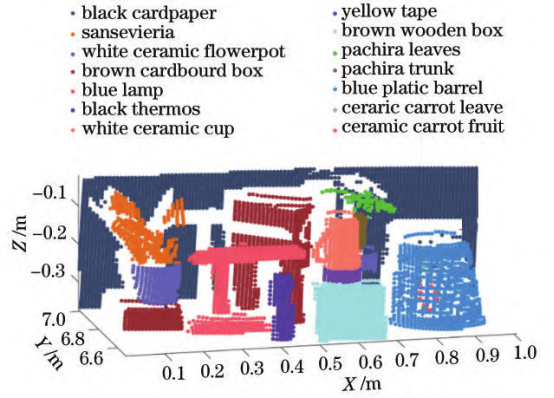
图514种地物的真实类别
基于本文研究样本相对较少、特征维度较高的特点,故采用随机森林分类算法。本文对不同地物目标进行手动标注,不同的颜色代表不同类型的地物。此外,对于随机森林分类算法,决策树的数量和特征最大值是影响分类精度的两个重要参数。因此,本文采用基于交叉验证的网格搜索对参数进行优化。此外,由于数据量相对较小,采用三者交叉验证方法确保目标分类的准确性。此外,采用总精度(OA)、平均精度(AA)、Kappa系数三个分类评价标准对分类结果进行评价。
四、结果与讨论
4.1空谱特征联合的地物分类结果
基于6种不同的地物分类策略,本文分别将对应的分类特征输入随机森林分类算法进行分类。
表4分类精度汇总
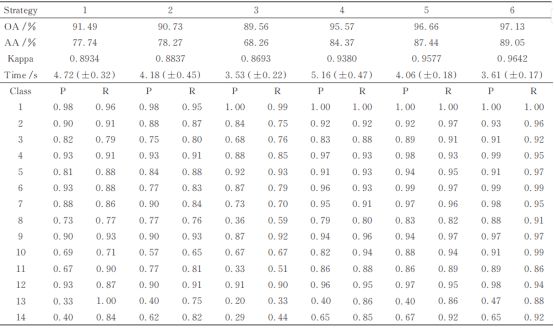
从表中可以看出,6种分类策略都取得了较好的分类效果,OA都高于89%,AA都高于68%,Kappa系数值都大于0.85。第1种分类策略OA可达91.49%,AA为77.74%,Kappa系数值为0.8934,其预测地物类别分布如图6(a)所示,绿色点表示地物错误分类的位置。其中大部分点云都能够被正确分类,但存在不同程度的椒盐噪声现象,导致部分类别地物精确率低于0.75。
第2种分类策略OA可达90.73%,AA为78.27%,使得部分类别分类准确度有所提高,其预测地物类别分布如图6(b)所示。然而,从6种分类策略的分类结果图6(a)~(d)和图7(a)、7(b)来看,部分地物都存在一定程度上的椒盐噪声和错误分类现象。分析具体原因如下:1)地物空间结构较复杂,地物回波信号受表面几何因素影响较大;2)激光光斑照射至地物边缘位置或者仅有部分光斑照射至地物目标导致光谱信号不准确。
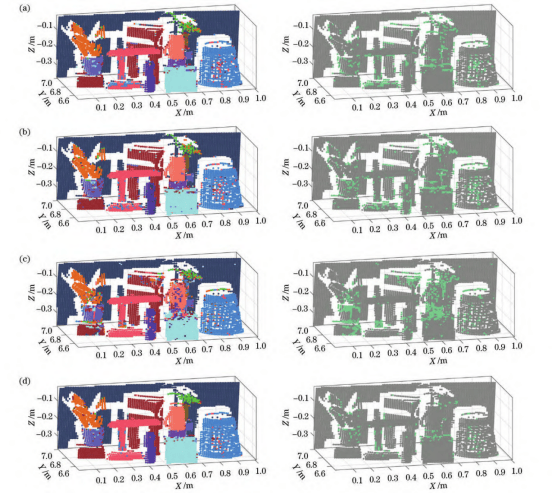
图6前4种分类策略的地物分类结果。(a)32通道光谱信息与高程值;(b)光谱指数;(c)几何特征;(d)空谱特征组合
第3种分类策略OA可达89.56%,因上述原因导致部分地物类别精确率较低,处于0.50以下,最终使得类别的AA下降,Kappa系数值为0.8693,预测地物类别分布如图6(c)所示。从图中可以看出,错分点大部分聚集在地物的某一偏弯曲位置或者空间结构较为复杂区域。分析是在地物某些弯曲细小位置或者空间结构较为复杂区域存在计算偏差,最终导致错分现象。
第4种分类策略相比前3种分类策略,总体分类精度都有了较大提升,OA可达95.57%,AA为84.37%,Kappa系数值为0.9380,其预测地物类别分布如图6(d)所示。从表4可得到,第10类与第11类地物相比,分类精度有较大提升,分类准确度分别为0.82与0.86。但第13与第14类地物准确率相比其他分类策略,提升程度有限。主要原因仍是空间位置较为复杂,激光光斑从塑料桶间隙穿过,导致光谱指数与空间特征准确计算较为困难。
4.2空谱特征选择优化的地物分类结果
增加地物分类特征维度,虽可在一定程度上增加地物分类精度,但也会引入冗余特征,浪费了计算资源,也会影响分类精度。为此,本文利用海洋捕食者算法对高光谱激光雷达构建的空谱特征进行特征选择,最终确定了12维的空谱特征用于地物分类,OA提升了1.09%,AA提升了3.07%,Kappa系数值提高了0.0197,其预测地物类别分布如图7(a)所示。
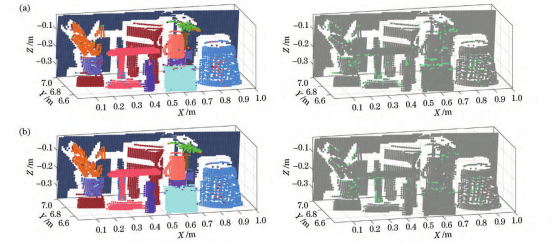
图7第5与第6种分类策略的地物分类结果。(a)基于海洋捕食者算法选择的空谱特征;(b)最优空谱特征组合
从表4类别准确性中可以看出,各个类别地物分类准确性都有小幅度提升,除了第13与第14类地物,其他类别分类准确性基本都在0.85以上。然而,海洋捕食者特征选择算法有可能引入相关性较高的分类特征,为此本文在12维空谱特征基础上进一步考虑特征相关性,剔除相关性较大的空谱特征,其12维空谱特征的相关性如图8所示。从图中可以看出,在12维空谱特征中,前5维特征相关性高于0.95,第7与第8维特征相关性也大于0.95。因此,可剔除前4维与第7维特征,最终保留7维空谱特征作为地物分类的最优空谱特征组合。最终,14类地物的OA为97.13%,AA为89.05%,Kappa系数值为0.9642。
从表4类别准确性中可以看出,相比第5种分类策略,各个类别地物分类准确性都有小幅度提升。与其他分类策略相似,除了第13与第14类地物错分点云较多之外,其他类别分类准确性都比较好,基本都在0.90以上。
最终分类结果表明,基于空谱特征优化选择的地物分类流程是可行的,可大幅度提高地物分类精度。此外,空谱特征优化选择确定最优波段组合用于地物分类还可以提高计算效率,节约成本。
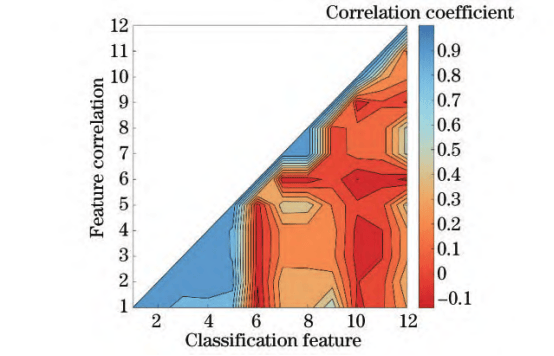
图8空谱特征相关性
五、总论
作为一种新型主动式遥感探测技术,高光谱激光雷达可联合被动高光谱成像技术与主动激光雷达技术的优势,实现地物空间-光谱一体化同步获取,在地物精细化分类领域发挥着重要作用。基于高光谱激光雷达获取的丰富光谱数据与高精度三维空间信息,本文提出了基于空谱特征优化选择的高光谱激光雷达地物分类流程,通过波段优化方法构建光谱指数特征,以及利用局部邻域表面拟合方法构建了可实现区域增强的法向量与曲率几何特征,最后通过空谱特征优化选择,确定最优空谱特征组合从而实现复杂场景下的高精度地物分类。
最终14类地物的OA为97.13%,AA为89.05%,Kappa系数值为0.9642,且大幅度提高计算效率。然而,由于某些地物空间结构较复杂,且激光光斑照射至地物边缘位置或者仅有部分光斑照射至地物表面,导致光谱数据获取准确性存在较大偏差,存在一定程度上的错误分类现象,后续可根据边界算法或条件随机场算法对分类结果进行平滑处理,消除椒盐噪声现象,进一步提高分类精度。此外,由于室内14类地物扫描实验场景相对较小,样本数量相对较少,仅获取了初步的分类结果,但仍具有一定参考价值,可为后续高光谱激光雷达地物精细化分类提供重要参考。
推荐:
便携式高光谱成像系统iSpecHyper-VS1000
专门用于公安刑侦、物证鉴定、医学医疗、精准农业、矿物地质勘探等领域的最新产品,主要优势具有体积小、帧率高、高光谱分辨率高、高像质等性价比特点采用了透射光栅内推扫原理高光谱成像,系统集成高性能数据采集与分析处理系统,高速USB3.0接口传输,全靶面高成像质量光学设计,物镜接口为标准C-Mount,可根据用户需求更换物镜。
欢迎关注公众号:莱森光学,了解更多光谱知识。
莱森光学(深圳)有限公司是一家提供光机电一体化集成解决方案的高科技公司,我们专注于光谱传感和光电应用系统的研发、生产和销售。
审核编辑 黄宇
-
空间激光雷达最小接收光功率的计算2009-05-15 4647
-
太赫兹时域光谱技术及激光雷达光谱探测误差分析与实验验证2010-04-23 2322
-
激光雷达是自动驾驶不可或缺的传感器2017-09-08 5355
-
激光雷达分类以及应用2017-09-19 8918
-
常见激光雷达种类2017-09-25 14020
-
消费级激光雷达的起航2017-12-07 7503
-
激光雷达知多少:从技术上讲讲未来前景2020-07-14 41712
-
激光雷达2021-01-17 20211
-
FMCW激光雷达与dTOF激光雷达的区别在哪?2021-07-23 30508
-
基于空谱联合特征的高光谱图像分类方法2021-05-28 1280
-
融合机载LiDAR和高光谱影像的土地利用分类2022-10-09 3381
-
激光雷达核心器件激光器的分类及选择2022-10-15 6169
-
地物光谱仪的特征及测量条件2022-12-16 2366
-
揭示新型主动光学传感器高光谱激光雷达辐射效应产生机制2023-06-22 1286
-
简述激光雷达的结构原理分类及特点 TIM320激光雷达的工作原理2023-08-22 5002
全部0条评论

快来发表一下你的评论吧 !
