

卡尔曼滤波基础知识
描述
附录:补充材料
附1、卡尔曼滤波主要框架?
卡尔曼滤波的本质属于系统的最优估计,通过卡尔曼增益来修正状态预测值,减小噪声信号对测试精度的影响,其核心内容是基于上一时刻状态的估计值以及当前状态的观测值,给出当前状态的最优估计,该算法涉及的核心方程有:
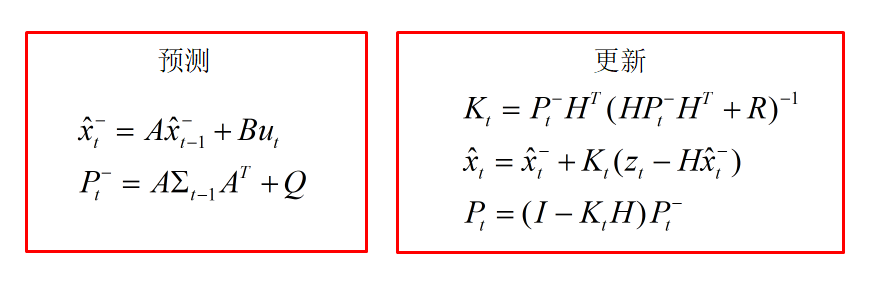
其中,xt为系统状态矩阵;zt为系统观测矩阵(实验结果);A为状态转移矩阵;B为控制输入矩阵;H为状态观测矩阵。
附2、卡尔曼滤波应用实例?
本部分通过简单的算例,介绍了卡尔曼滤波的应用场景,后续针对课题组实际需求,编写了能够应用于大应变传感器的滤波程序,具体如下所示:
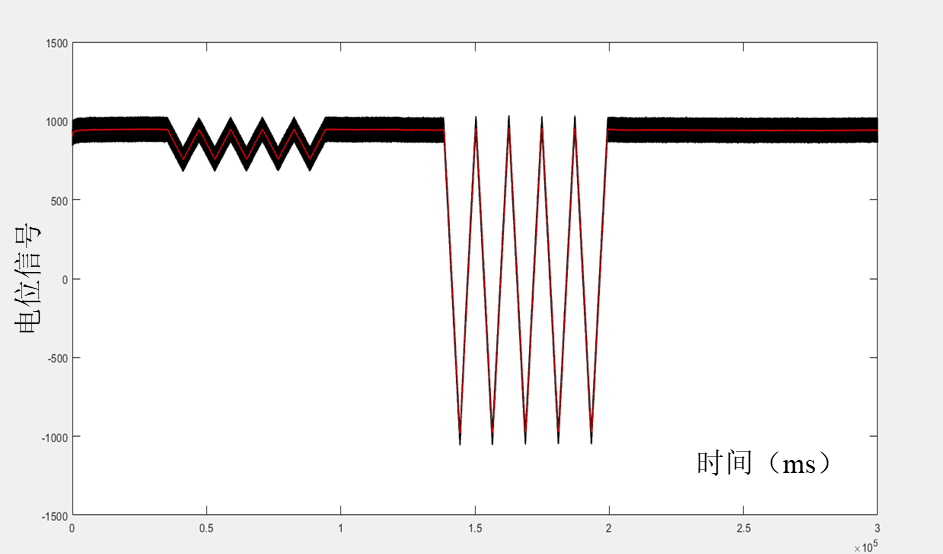
上图中黑线表述为信号采集系统得到的原始信号,红线表述为卡尔曼滤波后展现的信号特征;从图中可以看出,卡尔曼滤波能够有效地减小测量误差;其中,状态转换矩阵A=1,具体物理意义为:传感器输出信号只与应变量相关,不施加外界激励时,输出信号不发生改变;状态观测矩阵H=1,具体物理意义为:传感器输出的信号能够直接测量;
具体使用的源程序代码如下:
clear all;clc
%先对不同变量进行定义
% Q为过程激励噪声协方差
% R为观测噪声协方差
% X_bar为先验证估计
% Xbar为后验估计,最优估计值
% P_为先验估计误差协方差
% P为后验估计误差协方差
% Z为测量结果,测量数据(实验结果)
% K为卡尔曼增益
% 核心代码
% 读取传感器输出信号
node='信号采集结果.txt';
[x,Z]...
=textread(node,'%f%f','emptyvalue',0,'headerlines',10);
% 定义超参数:实验数据长度,过程激励噪声协方差,观测噪声协方差(测量设备性能参数)
changdu=length(Z);
Q=0.04;
R=100.25;
% 定义尺寸参数
cicun=[changdu,1];
% 实验数据
% Z=24+sqrt(R)*randn(cicun);
% 定义初始迭代参数
X_bar=zeros(cicun);
Xbar=zeros(cicun);
K=zeros(cicun);
P_=zeros(cicun);
P=zeros(cicun);
P(1)=1;
Xbar(1)=900.3;
% 卡尔曼滤波参数更新
for n=2:changdu
% 更新先验估计
X_bar(n)=Xbar(n-1);
% 更新先验估计误差协方差
P_(n)=P(n-1)+Q;
% 状态更新
K(n)=P_(n)/(P_(n)+R);
Xbar(n)=X_bar(n)+K(n)*(Z(n)-X_bar(n));
P(n)=(1-K(n))*P_(n);
end
% 绘图
plot(Z,'K+')
hold on
plot(Xbar,'r-')
hold on
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
卡尔曼滤波2013-07-04 3157
-
卡尔曼滤波有哪些应用2021-07-12 2116
-
卡尔曼滤波简介2022-02-28 2271
-
卡尔曼滤波器原理2008-07-14 1417
-
卡尔曼滤波器原理简介2015-12-15 1114
-
卡尔曼滤波学习及应用2016-04-13 1032
-
卡尔曼滤波算法2016-12-17 1238
-
一文看懂mpu6050卡尔曼滤波程序2018-03-09 76489
-
卡尔曼滤波原理及应用2022-06-09 581
-
扩展卡尔曼滤波的原理2022-08-12 7654
-
卡尔曼滤波(KF)与扩展卡尔曼(EKF)2023-05-10 1048
-
浅析卡尔曼滤波2023-06-14 3323
-
什么是卡尔曼滤波?卡尔曼滤波的作用是什么2023-08-08 9786
-
卡尔曼滤波家族2024-01-14 2845
-
卡尔曼滤波在图像处理中的应用实例 如何调优卡尔曼滤波参数2024-12-16 3151
全部0条评论

快来发表一下你的评论吧 !
