

极海400W EtherCAT总线型高压伺服控制器参考方案
描述
高压伺服控制器是一种高精度电子装置,用来控制高压伺服电机的位置、速度和力矩,可确保工业机器人、数控机床、喷绘写真、激光切割以及自动化生产线等设备实现高精度运动定位控制。其通过提供高效性能、快速响应、优化能量转换效率,保障伺服系统稳定可靠运行,有助于推动智能制造和工业4.0的转型与升级。
随着工业自动化的持续发展以及技术创新和行业应用的不断拓展,高压伺服控制器的市场前景广阔。未来几年,高压伺服控制器将继续沿着高效化、智能化、数字化方向演进,成为推动工业自动化智能转型的重要力量,展现出强劲的增长潜力和市场活力。
极海400W EtherCAT总线型高压伺服控制器参考方案,主控芯片采用全新发布的G32R501高性能实时控制MCU,具备灵敏感知、高效运算、精准控制等特性;整体方案采用双核并行处理架构设计和开放式伺服全功能设计,同时支持上位机ModBus协议和EtherCAT总线协议,提供配套的上位机参数调试工具,可灵活配置400余项伺服参数,有效满足各类定制化工业应用场景需求。
400W EtherCAT总线型
高压伺服控制器参考方案介绍
■ 输入电源范围:单相AC 200V~240V, -10%~+10%, 50/60Hz;
■ 额定输出电流:3.0Arms,最大电流输出:9.0Arms;
■ 速度范围:±7000rpm,支持弱磁算法;
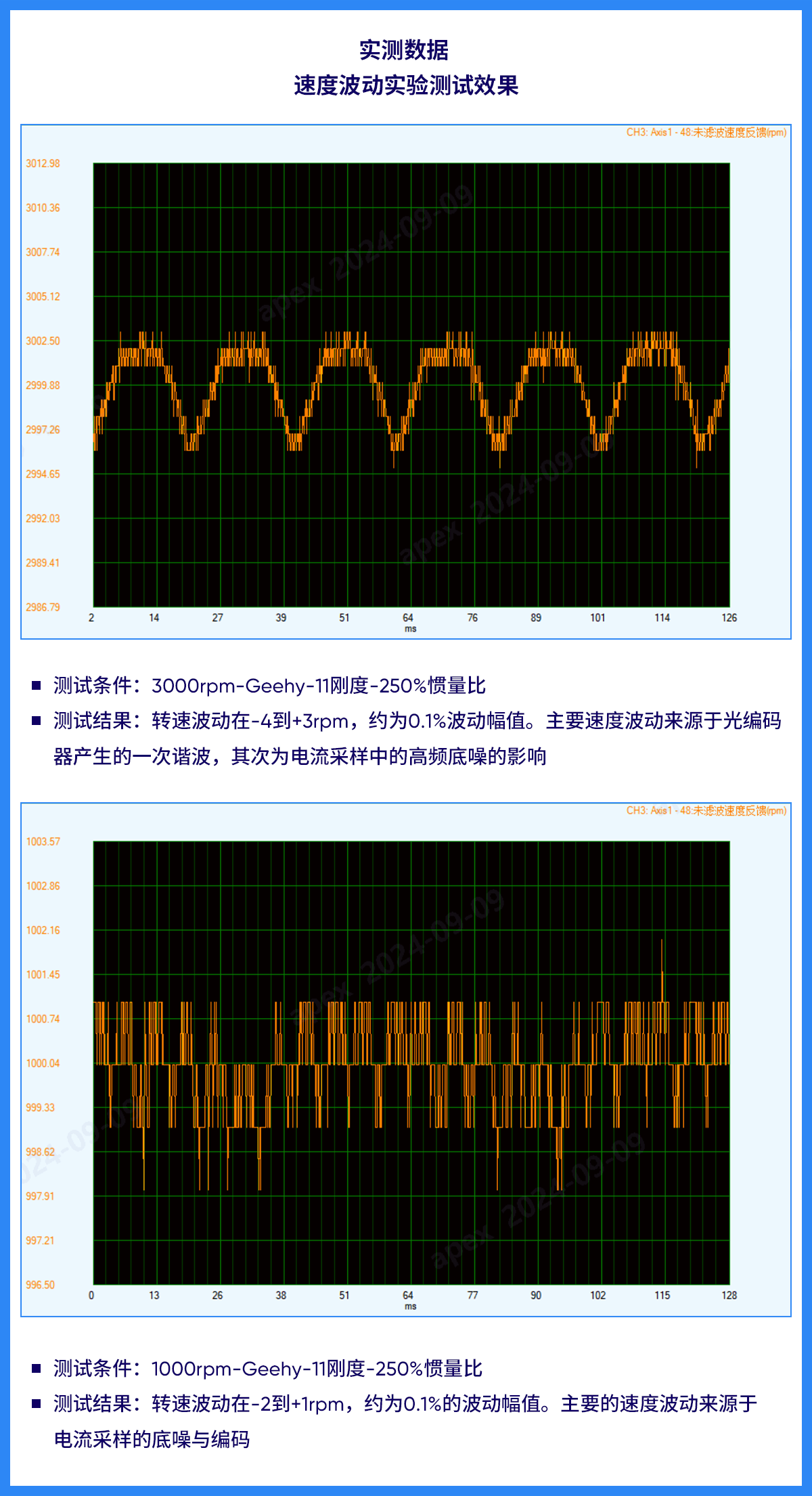
■ 转速精度:额定转速下可达1‰左右;
■ 支持三环闭环控制和电机参数静态辨识,电机参数通过总线获取,PID参数与电机参数相关联,可适配不同电机;
■ 支持多种编码器协议,支持协议握手,可兼容不同波特率编码器;
■ 支持EC总线功能,可通过主站进行位置控制;
■ 多种控制模式:外部脉冲位置控制、JOG控制、全闭环位置控制、速度控制、力矩控制;
■ 丰富报警代码:过压/欠压/过流/过载/过热/过速、主电源输入缺相、再生制动状态异常、位置偏差/制动率过大、编码器反馈错误、行程超限、EEPROM 错误等。
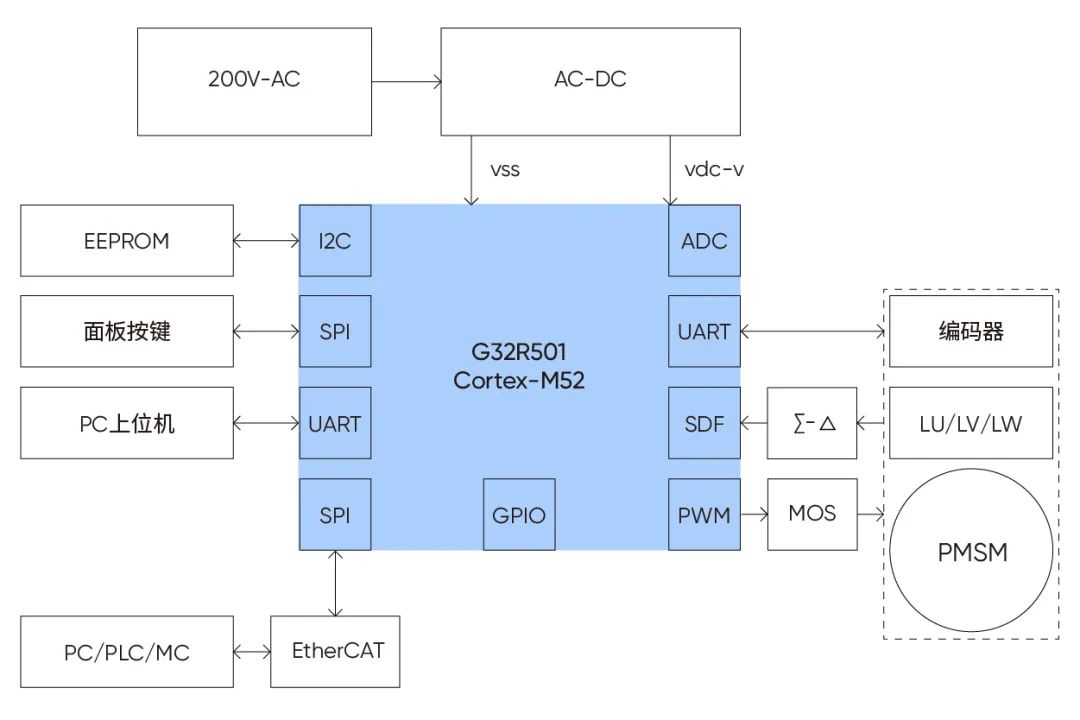
G32R501实时控制MCU特点
■ 单芯片方案,基于Cortex-M52双核架构,主频250MHz,通过CPU0处理位置环、速度环、I/O状态、以及协议处理;通过CPU1处理位置通信、电流环以及PWM输出;
■ 通过3路PWM模块产生3组互补PWM信号输出,实现高精度电机矢量控制;
■ 4个Σ-Δ滤波器模块(SDF),通过2路SDF采样两路相电流信号数字量,提升电流信号的精确度、响应效率以及信噪比;
■ 2个UART,1路实现总线编码器通讯,并预留兼容脉冲型编码器的设计;1路支持与上位机的数据交互;
■ 2个SPI,1路与EtherCAT从站芯片高效通信,实现EtherCAT总线控制;1路实现按键面板显示;
■ 1个I2C,实现外部EEPROM通讯,存储伺服关键参数;
■ 丰富输入输出端口,满足多种控制信号输入或状态输出,提升方案的多场景适用性。

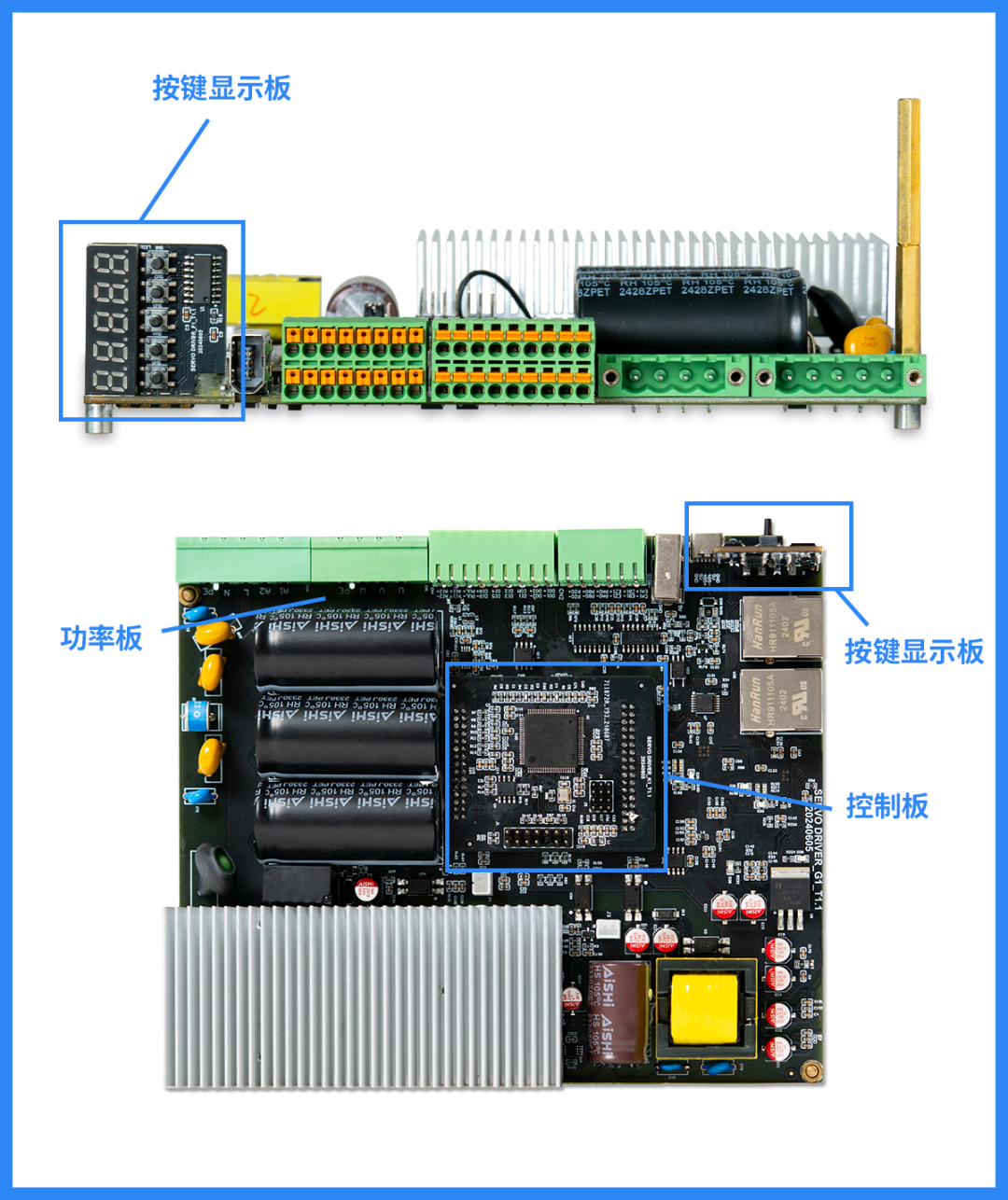
软硬件介绍
G32R501 400W EtherCAT总线型高压伺服控制器参考方案,由功率板、控制板、按键显示板组成。
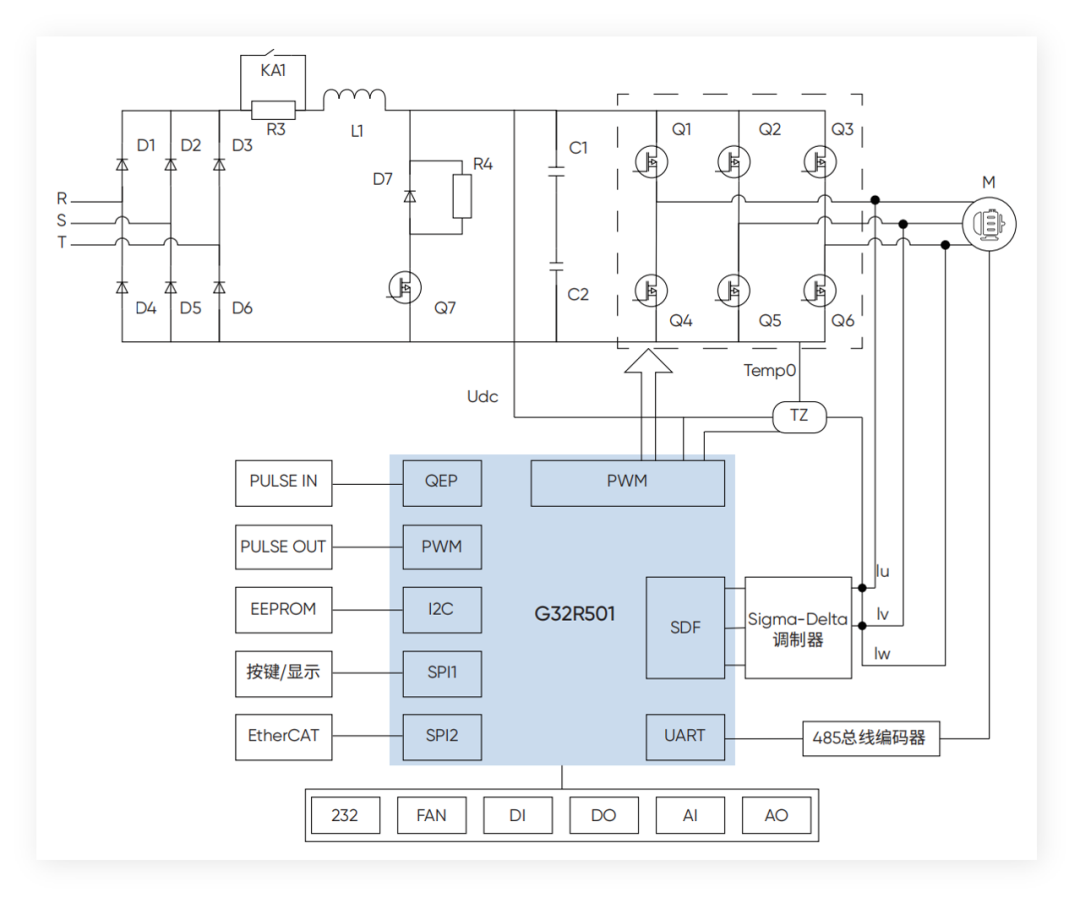
方案框图
采用三环级联模式的软件设计:
■ 位置环:给定来自外部脉冲、总线、I/O控制;位置反馈来自外部总线编码器;
■ 速度环:给定来自位置环的输出,也接受来自外部模拟量或多段速的给定,一般速度环带宽不超过 400Hz;速度反馈来自编码器位置解算;
■ 电流环:给定来自速度环的输出,电流反馈由SDF模块采样获得,执行周期选为62.5μs。
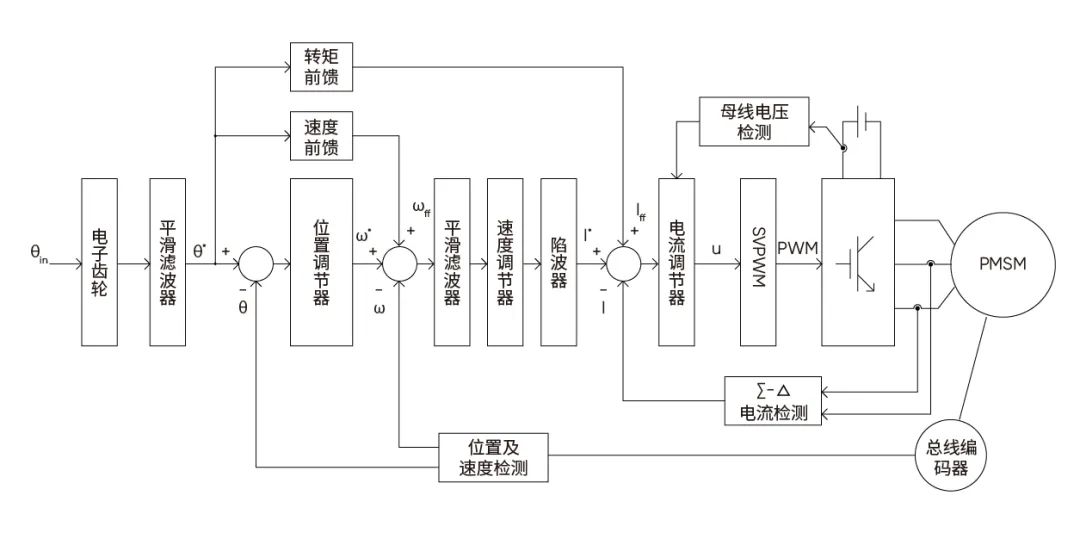
控制逻辑框图
G32R501 400W EtherCAT总线型高压伺服控制器量产级参考方案,采用双核并行处理设计架构,其中CPU0中断处理时间低至13.6μs,CPU1中断处理时间低至8.6μs,可支持客户实现更高性能、更丰富功能的产品设计。
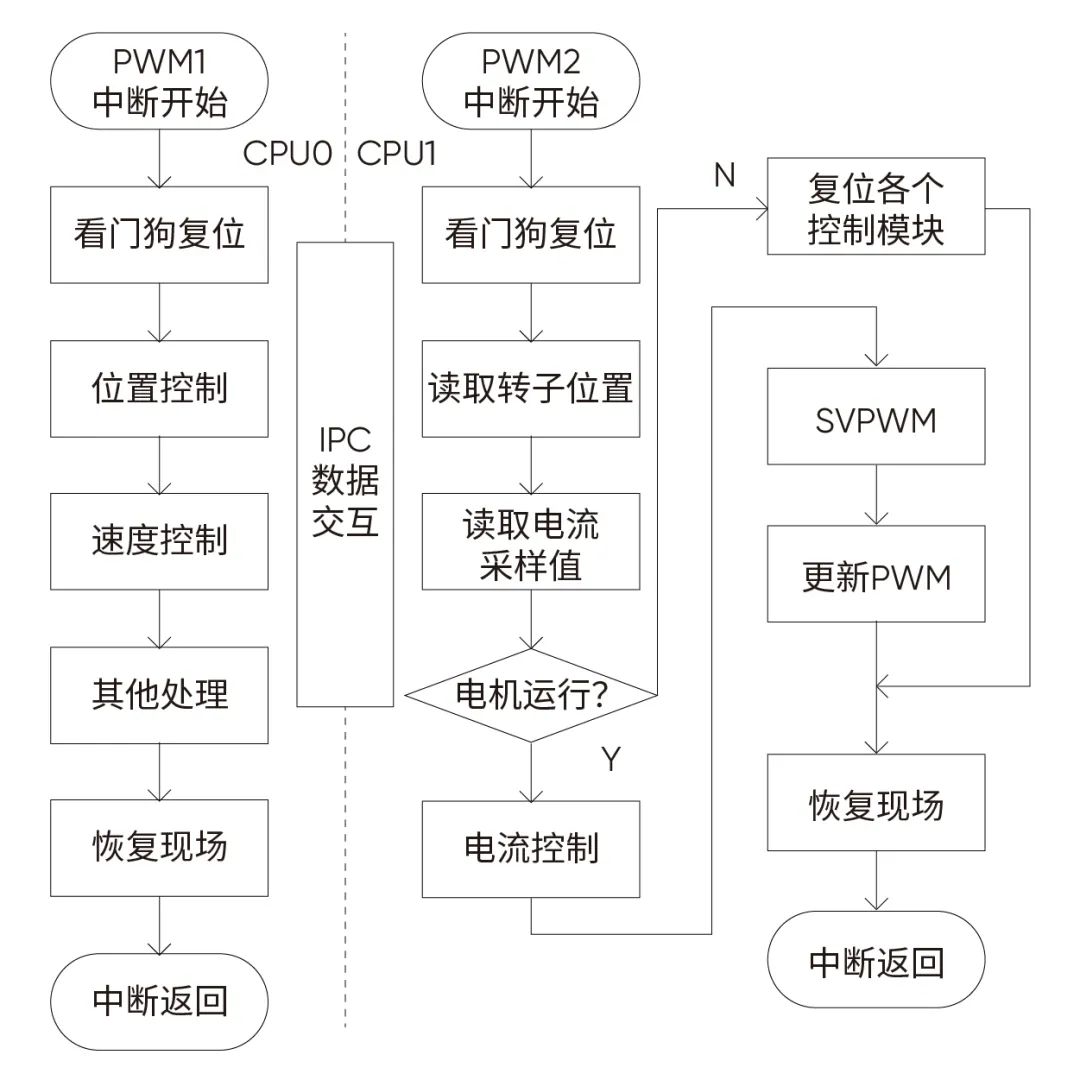
双核处理架构
极海G32R501 400W EtherCAT总线型高压伺服控制器量产级参考方案,涵盖完整的软硬件设计,可提供全功能软件固件和极海自研的伺服控制上位机PC调试工具,支持参数设置、JOG调试、故障排查、波形分析等功能;方案配有详细使用指南,方便工程师快速进行上手使用、性能评估以及二次开发。
极海始终秉承创新为魂、技术为本的发展理念,专注于为工业控制领域提供领先的量产级参考方案和全面且高效的技术支持,旨在为广大工程师和研发团队提供强大的创新动力。在工业自动化浪潮中,极海将矢志不渝地推动技术创新与突破,愿携手业界同仁共同谱写智能制造新篇章。
-
ethercat总线伺服如何控制 EtherCAT运行原理2024-01-24 11745
-
温州回收原装Delta/台达电机带刹车400w伺服驱动电机2021-05-28 877
-
EtherCAT总线运动控制器硬件是如何进行接线的?2021-07-15 7604
-
正运动技术运动控制器EtherCAT总线的基础使用2021-09-27 7216
-
经济型EtherCAT运动控制器:EtherCAT总线快速入门2023-05-11 2002
-
SK402模块组装400W高压钠灯电路图2009-06-11 2423
-
DMC 52000 EtherCAT总线型运动控制器2017-12-11 2059
-
400W贴片TVS瞬态抑制二极管型号汇总2021-09-20 3690
-
EtherCAT总线型DA200系列高性能伺服系统方案2023-01-09 1844
-
极海携工业控制伺服控制器等新方案亮相电机研讨会2023-04-01 841
-
基于极海半导体APM32F407系列MCU的伺服控制器应用方案2023-09-19 2678
-
HPM6E80高压伺服EtherCAT驱动器方案2025-01-09 2405
-
智能驱动 精准控制 | 极海G32R501总线型高压伺服控制器参考方案,加速工业自动化系统转型升级2025-01-14 909
-
上新 | HPM6E80高压伺服EtherCAT驱动器方案2025-02-08 1737
-
探索LTC4283:-48V、400W热插拔控制器的应用与特性2026-05-25 275
全部0条评论

快来发表一下你的评论吧 !
