

激光雷达进化史:从机械式到全固态
描述
激光雷达是集激光、全球定位系统(GPS)、和IMU(惯性测量装置)三种技术于一身的系统,相比普通雷达,激光雷达具有分辨率高,隐蔽性好、抗干扰能力更强等优势。
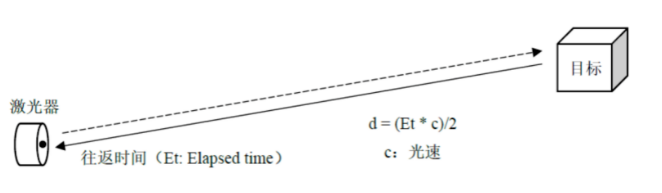
随着科技的不断发展,激光雷达的应用越来越广泛,在机器人、无人驾驶、无人车等领域都能看到它的身影。它是以激光作为探测手段,通过测量光脉冲的飞行时间来计算距离,进而构建出周围环境的立体图像。随着技术的不断进步,激光雷达也经历了从机械式到混合固态,再到全固态的演变。
近期,明治重磅推出了全固态激光雷达AS5000,开启了新年3D空间智能感知的新篇章。

那么本期干货内容,小明将带您深入了解这三种不同类型的激光雷达原理和选型秘诀,揭开它们神秘的面纱!
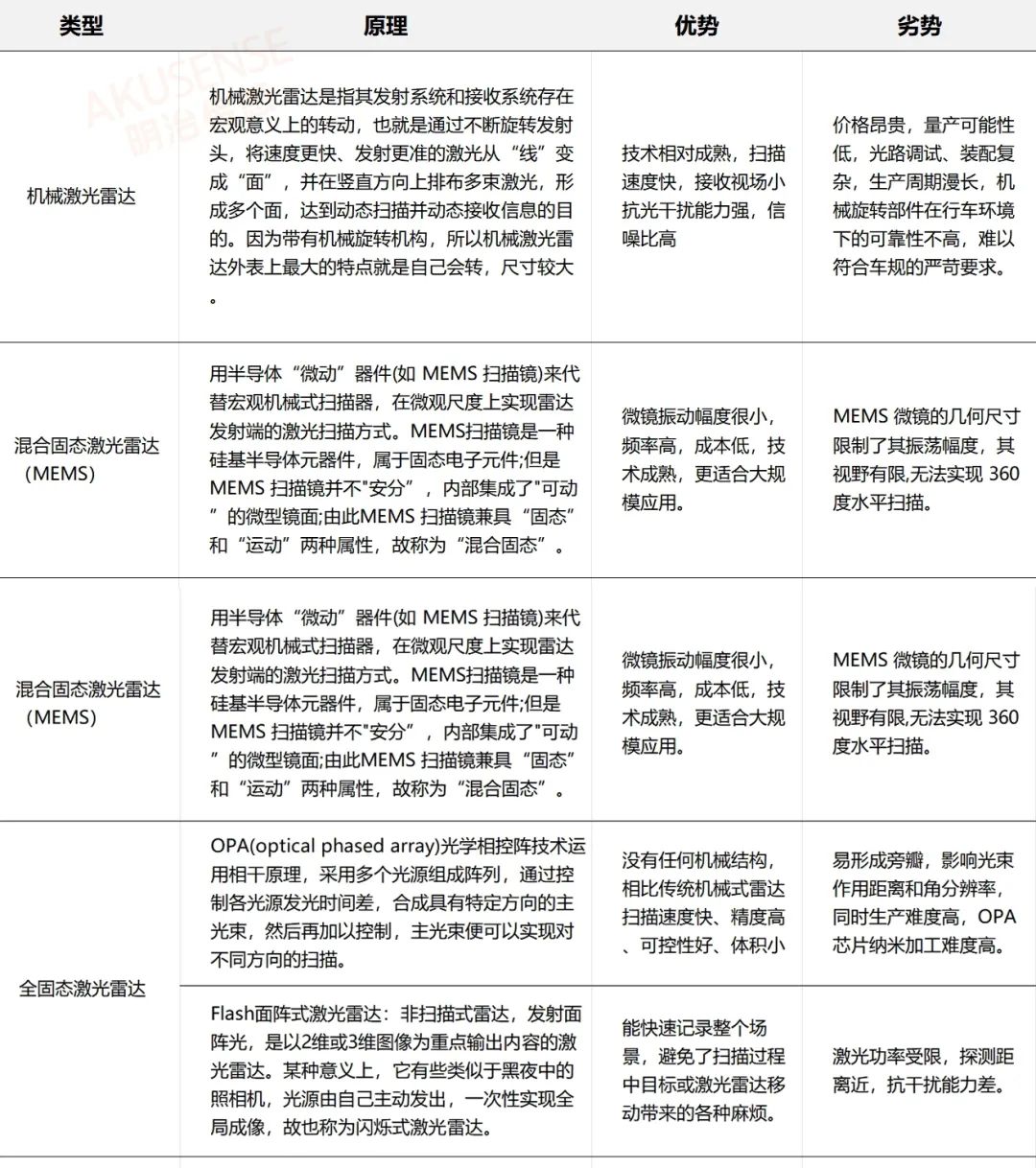
机械式激光雷达
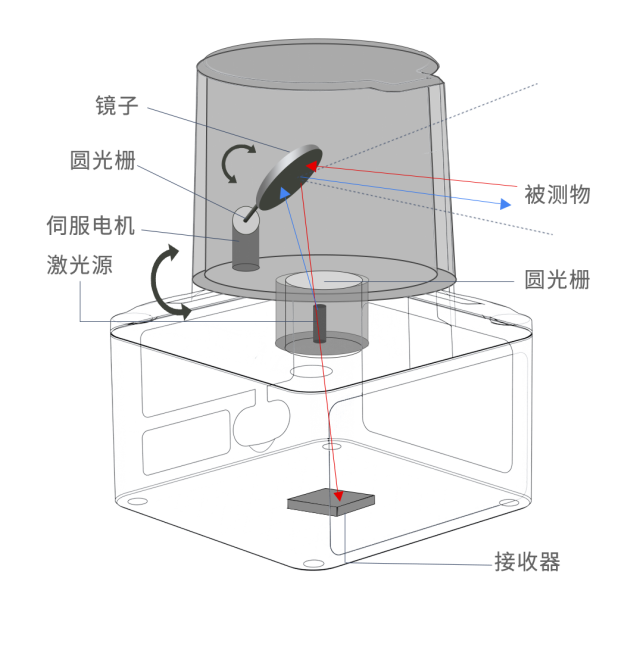
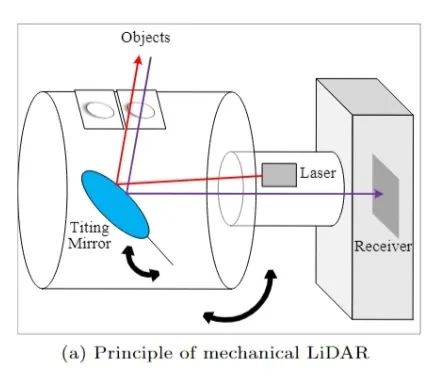
机械式激光雷达是发展历史最为悠久的,这类激光雷达的发射器和接收器都安装在旋转部件上,通过电机和转台带动光机结构整体 360° 旋转,从而实现全方位的环境感知。
机械式激光雷达通常包括发射器、接收器和旋转镜片,这些组件共同作用以生成高精度的雷达点云数据。
明治传感拥有丰富的机械式单线激光雷达产品系,避障型、导航型可选。扫描范围360°,最高扫描频率30Hz串口(Type-C接口)通讯,可在线输出测量数据(含各方向距离和光强数据)
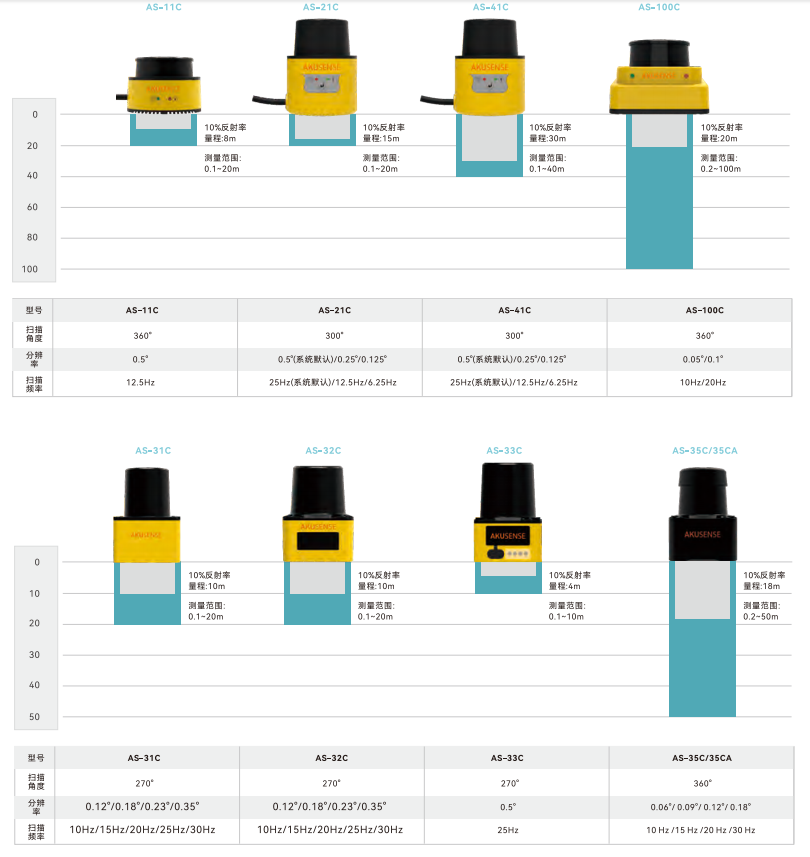
↑点击图片获取产品资料
优点:机械式激光雷达具有较高的精度和分辨率,适用于长距离探测和高精度测绘任务。例如,在自动驾驶汽车中,机械式激光雷达可以提供精确的环境感知能力,帮助车辆进行路径规划和障碍物检测。
缺点:由于其复杂的机械结构,机械式激光雷达体积较大、成本较高,并且容易受到振动和环境因素的影响,因此在量产和可靠性方面存在一定的局限性。
混合固态激光雷达
既要满足体积小,又要精度高、视角广,半固态激光雷达应运而生。
混合固态激光雷达是一种介于机械式和全固态之间的技术,它结合了机械部件和固态部件的优点。混合固态激光雷达通常采用固定发射器和接收器,通过内部运动的反射镜或转镜来改变激光束的方向,从而实现扫描。
根据运动部件类型不同,混合固态激光雷达又可以细分为转镜类混合固态激光雷达、MEMS混合固态激光雷达和棱镜类混合固态激光雷达。
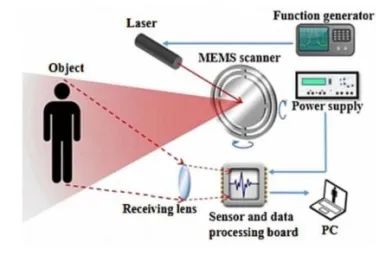
优点:混合固态激光雷达相比机械式激光雷达体积更小、成本更低,同时具备一定的扫描速度和可靠性。例如,MEMS(微机电系统)激光雷达利用微型镜片快速扫描,能够实现较高的帧率和较低的功耗。
缺点:混合固态激光雷达的视场角(FOV)相对较小,且扫描线数有限,因此在某些需要大范围扫描的应用中可能表现不佳。
全固态激光雷达
Flash技术 OPA技术
这里的固态,不是我们日常理解的液态、固态,而是指雷达内部完全没有运动部件,仅通过半导体技术实现光束的发射、扫描和接收。它取消了复杂和高频转动的机械结构,不仅能降低物料和量产成本,也能提升产品可靠性、生产效率和一致性,还将体积有效的压缩,符合车规,潜力巨大,随着技术的进步,全固态激光雷达的成本正在逐渐降低,并且在某些应用中表现出较高的性价比。目前常见固态激光雷达分为光学相控阵(OPA)和闪光式(Flash)。
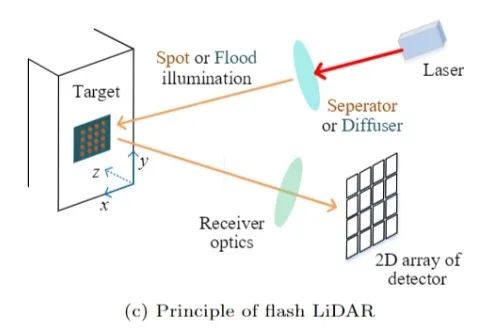
Flash固态激光雷达:
采用类照相机工作模式,它原理是短时间向前方发射大面积覆盖的激光,就好比连续打开的手电筒,通过高度灵敏的接收器实现对环境周围图像的绘制,一次性实现全局成像。
Flash激光雷达的原理类似于拍照,但最终生成的数据包含了深度等3D数据,而它也是目前纯固态激光雷达最主流的技术方案。
这种技术虽然探测距离较短,但具有较高的探测精度和快速扫描能力
OPA固态激光雷达:
高系统集成度的光学相控阵技术(OPA)能够满足在自动驾驶和无人机测绘等应用中表现出色,满足全固态、小型化的发展需求。
利用光束的相位控制技术,无需机械运动部件,能够实现快速扫描和高分辨率成像。具有高精度和大扫描范围的特点。
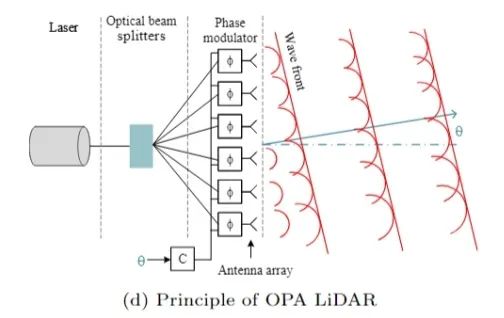
激光器功率均分到多路相位调制器阵列,光场通过光学天线发射,在空间远场相干叠加形成一个具有较强能量的光束。
经过特定相位调制后的光场在发射天线端产生波前的倾斜,从而在远场反映成光束的偏转,通过施加不同相位,可以获得不同角度的光束形成扫描的效果。
由于没有机械部件,OPA可以通过控制每个元件的相位和振幅来实现快速扫描,从而提高系统的扫描速度。
综上所述,机械式、半固态和全固态激光雷达各有千秋,它们在不同的应用场景中发挥着不可替代的作用。
机械式激光雷达以其高精度和远距离探测能力,在自动驾驶汽车和测绘领域独占鳌头;
半固态激光雷达则以其较小的体积、较高的稳定性和相对低廉的成本,成为众多智能设备的首选;
而全固态激光雷达,凭借其超小的体积、超高的扫描频率和潜在的低成本优势,正逐步成为未来智能技术发展的主流方向。
随着技术的不断突破和成本的进一步降低,激光雷达技术必将不断突破,在更多领域大放异彩,为大家带来更加智能、便捷的体验。
-
全固态激光雷达现在发展到什么阶段了?2025-12-22 1021
-
机械、半固态、全固态激光雷达有何区别?谁更适合自动驾驶?2025-06-05 1738
-
科普:一文了解固态和半固态激光雷达2024-12-23 4790
-
应用在全固态激光雷达中的ALS环境光传感芯片2023-11-08 1609
-
激光雷达的不同技术路线:机械式、半固态(又叫混合固态)和固态2023-03-08 7427
-
什么是激光雷达 不同技术路线的激光雷达的优势2023-02-21 5478
-
基于其独有数字激光雷达架构而研发的最新高性能固态激光雷达:ES22020-10-09 6380
-
Pandar64 64线机械式激光雷达产品手册免费下载2019-08-02 2620
-
北醒固态激光雷达,欢迎坛友看看2018-01-26 7962
-
北醒固态设计激光雷达2018-01-25 5897
-
激光雷达2018-01-11 7256
-
固态激光雷达2018-01-04 5372
-
消费级激光雷达的起航2017-12-07 7522
全部0条评论

快来发表一下你的评论吧 !
