

在Mac上使用Docker构建noVNC环境并运行MyCobot
描述
一、引言
这篇文章主要内容是关于如何在 Ros2 环境中构建在 Mac 上模拟 Mycobot 280 M5 的环境。
我写这篇文章是因为相关可参考的文章不多,希望这篇文章可以给你一些帮助。
由于我是 ROS 新手,关于文章内容如果您有任何指教或补充,欢迎在下方留言和我们沟通。
二、准备工作与技术介绍
1、硬件组件
Elephant Robotics myCobot-6 DOF collaborative robot
myCobot 280系列机械臂是专门为研究、教育、技术应用和商业展览而开发的6-DOF协作机器人。
2、环境配置
M3 MacBook Air
16GB RAM
三、项目运行
1、搭建ROS2环境
在Docker上搭建ROS2(Humble)环境
可以参考此链接搭建安装了ROS2的Ubuntu图形用户界面环境 https://memoteki.net/archives/2955#index_id3
然后创建一个Docker容器
*如果你的mac使用的是M系列芯片,或者arm64
在设置Dock容器的共享内存时最好进行一些修改——通常共享内存默认是64MB,容量不大,所以建议至少应设置为2GB。
docker run -p 6080:80 --security-opt seccomp=unconfined --shm-size=2G tiryoh/ros2-desktop-vnc:humble-amd64
成功启动后,访问http://127.0.0.1:6080/ 。此时 Ubuntu 应该已启动。
2、构建 MoveIt2 环境
这一步是通过官方教程来完成的。
教程链接为:https://moveit.picknik.ai/main/doc/tutorials/getting_started/getting_started.html
按顺序执行以下命令:
在 Ubuntu 终端中操作
source /opt/ros/humble/setup.bash
安装rosdep(可能已安装)
sudo apt install python3-rosdep sudo rosdep init rosdep update sudo apt update sudo apt dist-upgrade
安装colcon mixin扩展
sudo apt install python3-colcon-common-extensions sudo apt install python3-colcon-mixin colcon mixin add default https://raw.githubusercontent.com/colcon/colcon-mixin-repository/master/index.yaml colcon mixin update default
安装 vsctool
sudo apt install python3-vcstool
创建colcon工作空间
mkdir -p ~/ws_moveit/src
获取MoveIt源代码
cd ~/ws_moveit/src git clone -b humble https://github.com/moveit/moveit2_tutorials vcs import --recursive < moveit2_tutorials/moveit2_tutorials.repos
构建colcon工作空间
sudo apt remove ros-humble-moveit* sudo apt update && rosdep install -r --from-paths . --ignore-src --rosdistro humble -y
进行构建可能需要几十分钟到一个小时。
关于构建参数:
在Docker环境中,建议指定以下参数,以避免可能出现的内存不足问题。
--executor sequential:逐个进行构建
--parallel - workers 2:指定同时进行构建的数量
如果可以的话,也增加Docker共享内存来加快构建时间。
cd ~/ws_moveit colcon build --mixin release
源代码
source ~/ws_moveit/install/setup.bash echo ‘source ~/ws_moveit/install/setup.bash’ >> ~/.bashrc
3、关于构建中的错误
在构建中可能遇到各种错误,这里写出部分注释以供参考。
pick_ik错误
sudo apt-get remove ros-humble-pick-ik
ament_cmake错误
以特权用户身份运行构建命令
su
4、让mycobot模拟器与moveit2一起工作
参考以下链接来创作
https://www.youtube.com/watch?v=ZOIKEV_BCBE&t=566s
获取ROS2的mycobot源
在ws_moveit/src下克隆
git clone https://github.com/elephantrobotics/mycobot_ros2.git
5、启动设置助手
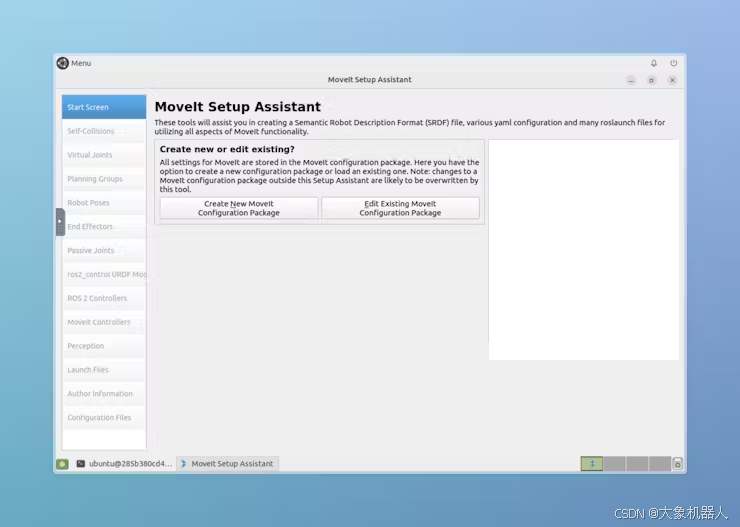
选择创建新MoviIt
选择mycobot的URDF并点击loadFile
mycobot_ros2/mycobot_description/urdf/mhcobot_280_m5/mycobot_280_m5.urdf
机器的型号以及泵头或摄像头是否可用可以根据情况而定。
自碰撞设置(Self collision)
默认生成冲突矩阵。
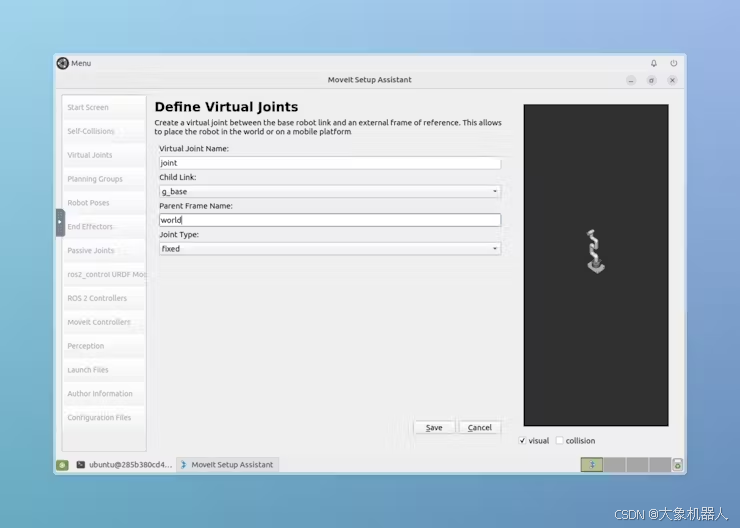
虚拟关节设置(Virtual joints)
添加虚拟接头,命名后保存它们。
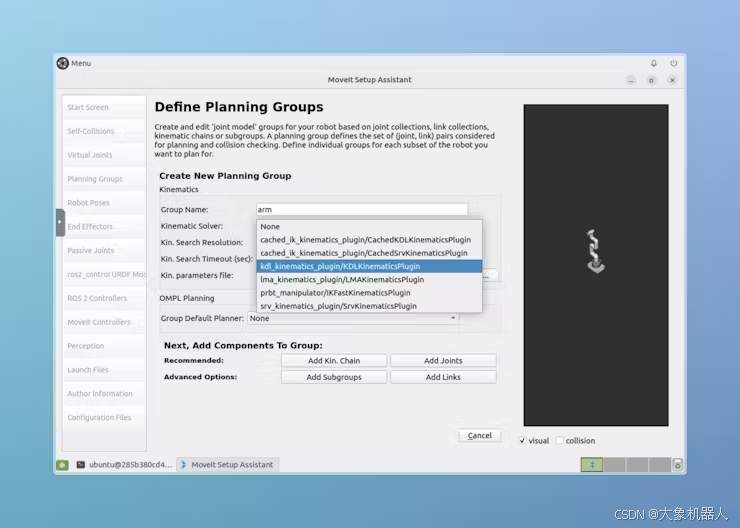
定义规划组(Planning Groups)
添加 Add Group
选择求解器的kdl_kinematics_plugin
Kin. parameters file设置为3
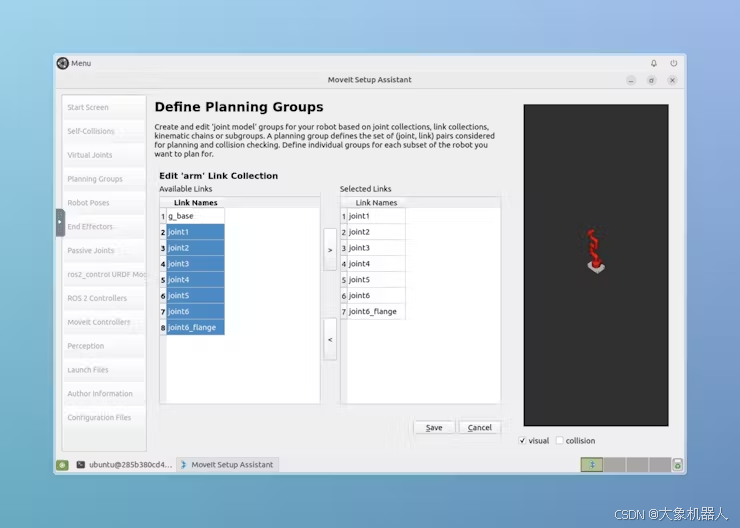
添加关节
除g_base以外,均可添加添加链接
同上,增加g_base
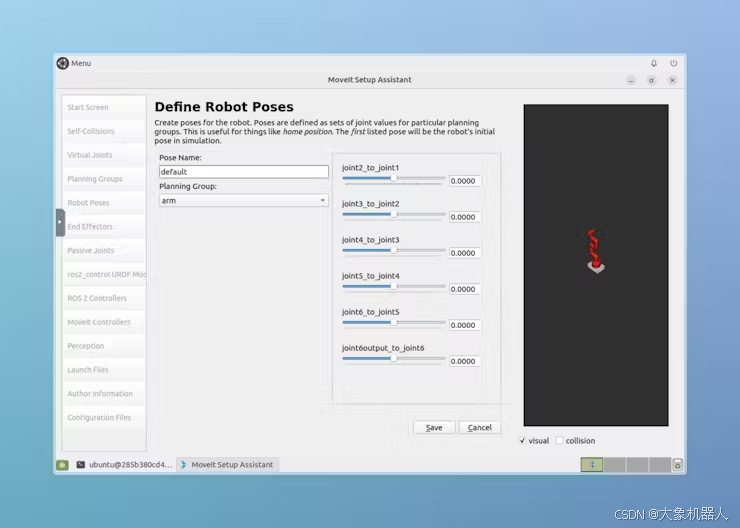
添加姿态
使用滑块创建姿态。
也可以之后再添加。
设置ROS2控制器
点击“自动添加”
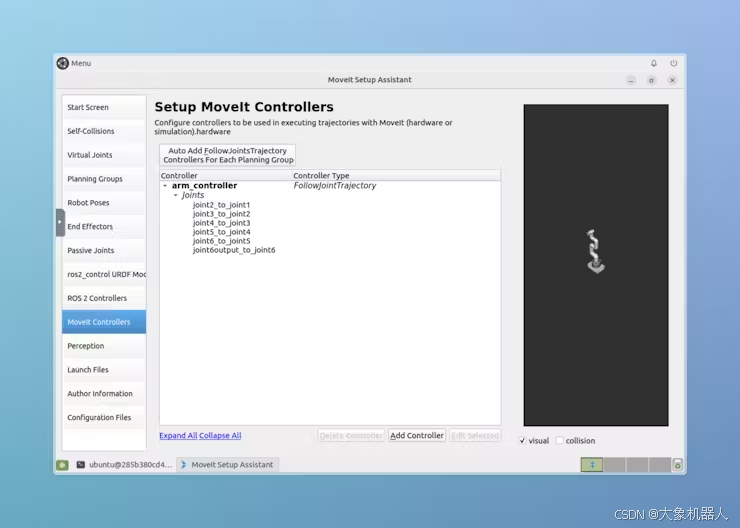
设置MoveIt控制器
点击“自动添加”
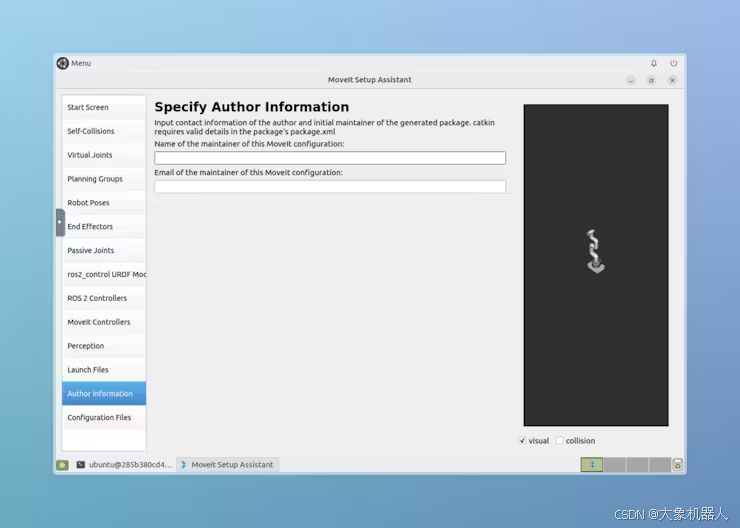
添加作者和邮箱
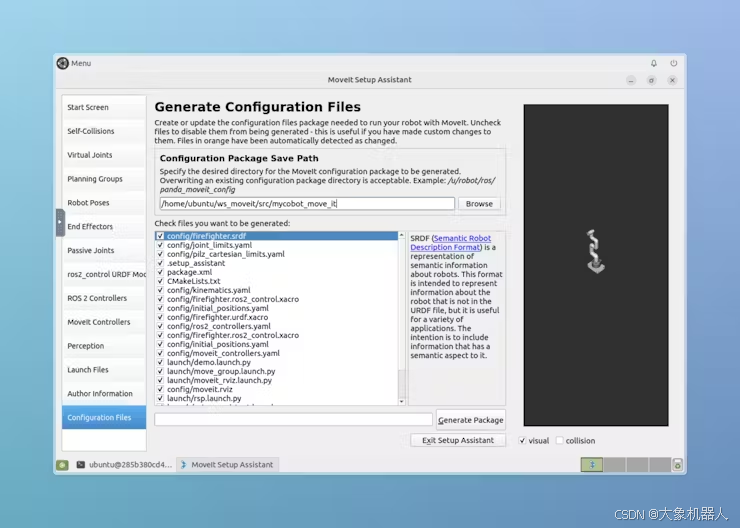
生成并保存
保存在colcon工作空间的src目录下
构建和安装
cd ~/ws_moveit colcon build --mixin release . install/setup.bash
启动
ros2 launch mycobot_move_it demo.launch.py
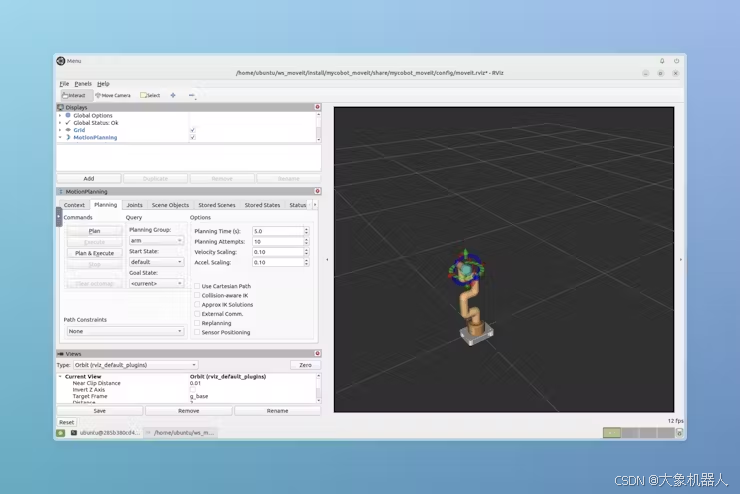
四、总结
通过以上步骤就可以使程序在模拟器中运行了。但是问题在于,在Mac系统上无法通过Docker使用USB,所以无法运行实际设备。如果你有关于本文的内容或者机械臂使用有任何观点和疑问,欢迎留言和我们交流沟通。
-
Docker开源开发平台运行容器化应用程序2018-07-06 4077
-
如何在Mac上安装ArduinoIDE并布置环境支持NodeMcu2021-11-01 950
-
docker在ROC-RK3308-CC上运行的方法是什么?2022-03-09 1613
-
介绍一下linux环境下docker的使用流程2022-04-27 2317
-
在Ubuntu 18.04 for Arm上运行的TensorFlow和PyTorch的Docker映像2022-10-14 3308
-
Docker将要在Windows和MAC平台本地化2017-10-11 859
-
Docker容器构建环境及安全措施分析2018-07-31 4922
-
Docker容器还未准备好上架苹果M1 Mac2020-11-18 1545
-
Docker开发预览版即将支持苹果Mac M1芯片2020-12-11 2946
-
在Mac上安装ArduinoIDE并布置环境支持NodeMcu2021-10-26 949
-
使用docker完成编译环境创建2022-04-21 4853
-
开源的Docker中运行Mac OS是什么体验?2022-11-14 1785
-
Docker 教程:如何将Helix QAC作为容器创建并运行2022-10-31 2274
-
介绍一款基于docker的渗透测试工具箱2023-08-18 1159
-
Docker运行环境安装2024-10-29 1565
全部0条评论

快来发表一下你的评论吧 !
