

RZ/T2M Motor Solution Kit功能安全使用介绍(2-2)
描述
前期回顾
01RZ/T2M Motor Solution Kit功能安全使用介绍(1)
02RZ/T2M Motor Solution Kit功能安全使用介绍(2-1)
近年来,“功能安全”正在成为工业设备领域中实现系统安全性的可靠方法,在工业设备领域,可能会因为机器故障和事故的发生导致经济损失,甚至造成人身伤害事件,从而对工厂运转造成影响或引起社会关注。为了避免这些情况,“功能安全”的重要性与日俱增。在人与机器人协同作业来提高作业效率的进程中,设备安全性越发受到关注。因此,越来越多的设备制造商以满足社会与用户的要求和提高商品竞争力为目的,开始研究功能安全设备。
在本文中,我们将介绍工业领域功能安全应用之一的安全驱动设备,介绍如何使用瑞萨电子RZ/T2M Motor Solution Kit开发板,实现安全驱动器应用方案。
本文是RZ/T2M Motor Solution Kit功能安全使用介绍(2-2),将介绍如何搭建开发环境和开发流程以及演示测试。
六硬件设置
6.1电源供电设置,Inverter板和Controller板可分开单独供电,也可以通过Inverter板一起供电,通过设置Inverter板P1跳线帽1-2短路,表示Inverter板供电,同时给Controller板供电,此时Controller板不再额外供电。
七设置电机参数
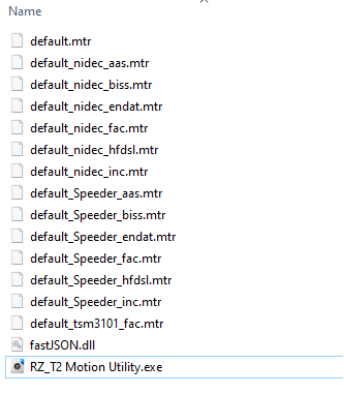
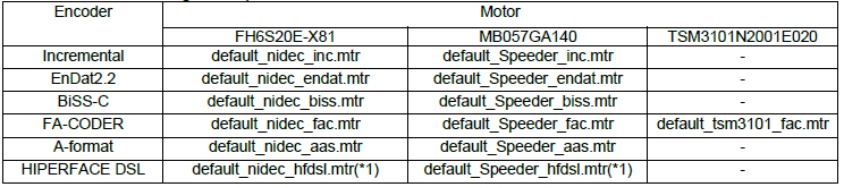
7.1本文使用的电机型号是FH6S20E-X81,编码型号是ROC425,对应的电机参数是default_nidec_endat.mtr,可从 01an6469XX0400-rzt2m-motor-solution-kitSoftwareMotionUtilityRZ_T2 Motion Utility找到对应文件
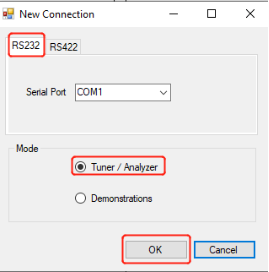
7.2设置电机参数,使用RS232转USB连接开发板和PC,双击RZ_T2M Motion Utility软件,选择RS232 Tuner/Analyzer OK打开软件。

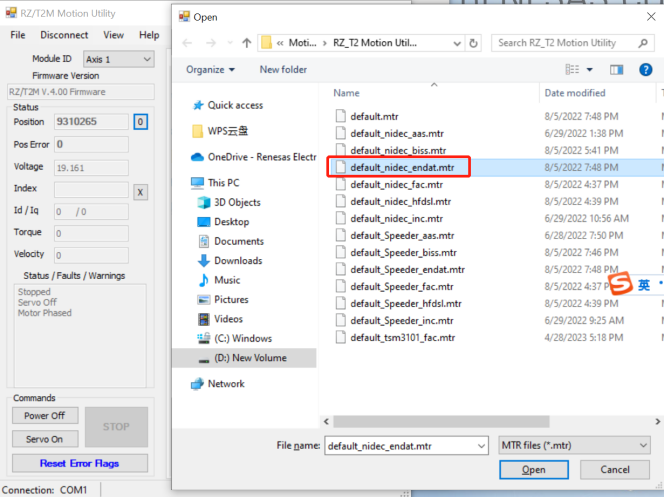
7.3加载电机参数文件,File->Import指定default_nidec_endat.mtr->Open,加载后点击File->Save to Flash修改参数完毕,板子上电重启,如果LED0511亮,则表示修改失败,需重新修改。
注意:
1.如果需要RZ_T2M Motion Utility对电机进行调试,需要将default_nidec_endat.mtr重命名为default.mtr。软件的使用请参考使用手册。
2.修改电机参数步骤需要在电机停止运行的条件下进行,如果电机参数不对,会导致电机运行异常,严重时会烧坏开发板的功率器件。
八设置主站
8.1连线
使用排线连接Motor board的P2900接口和Inverter Board的P8接口,将Twincat主站网口连接EK1100的IN口,EK1100的OUT口连接Motor board的IN口,分别给Inverter board和EK1100供电24V。

8.2配置TwinCAT主站工程
8.2.1 将该路径RZT2M_SolutionKit_FWothers_3CPU1srcusrapp6 ztfspsrc _ecatutilitiesesi
的Renesas_RZT2M_Motor_Solution_Kit_CiA402.xml文件拷贝到TwinCAT的安装目录TwinCAT3.1ConfigIoEtherCAT
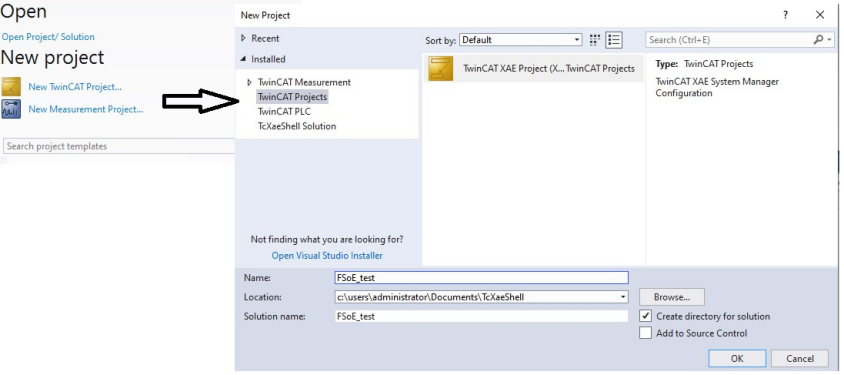
8.2.2 新建TwinCAT工程
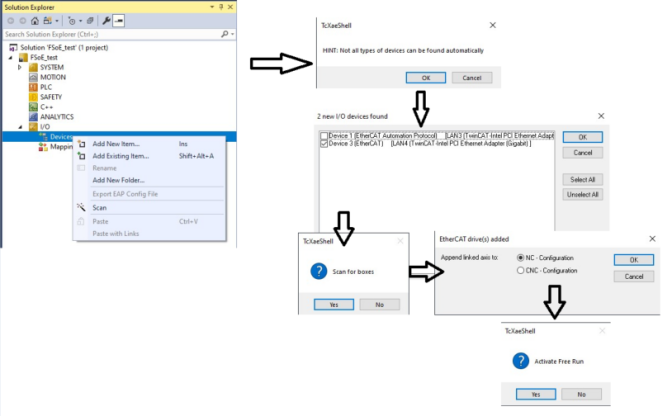
8.2.3 扫描网络,选择对应网卡,生成网络拓扑,注意第一次扫描时,需要刷写EEPROM。
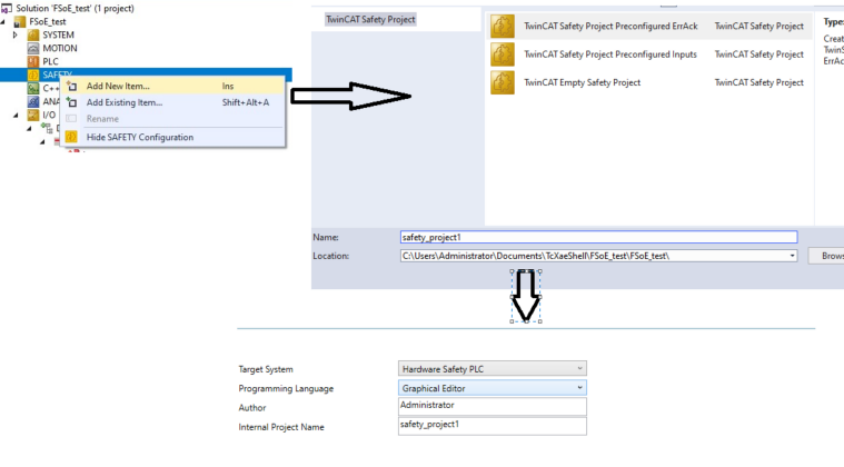
8.2.4 创建TwinSAFE项目
8.2.5 TwinSAFE项目中输入设备
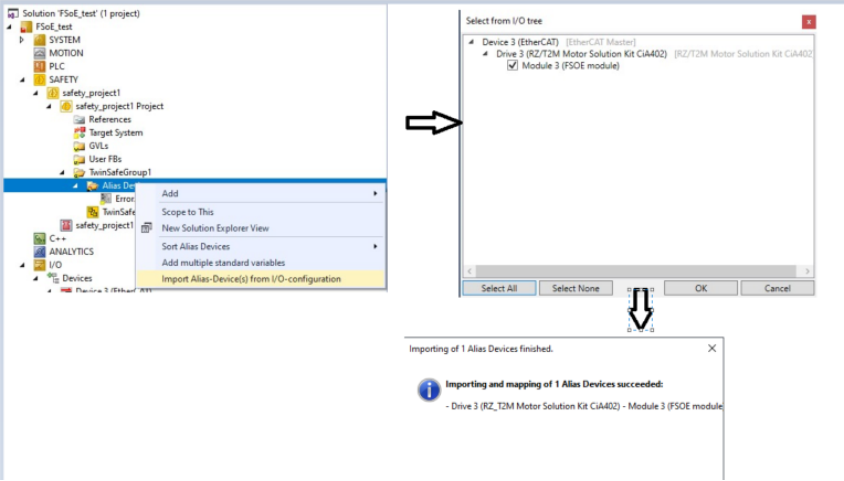
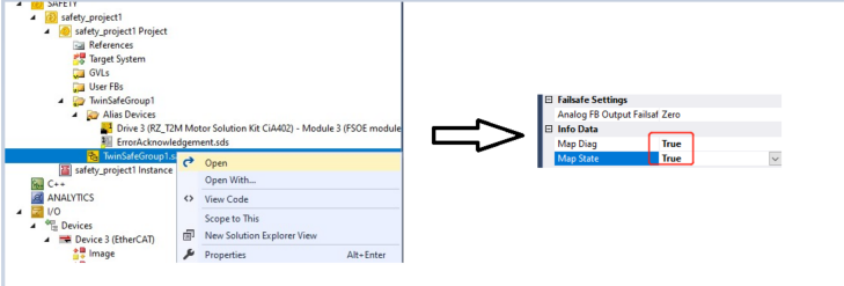
8.2.6 添加ErrACK signal
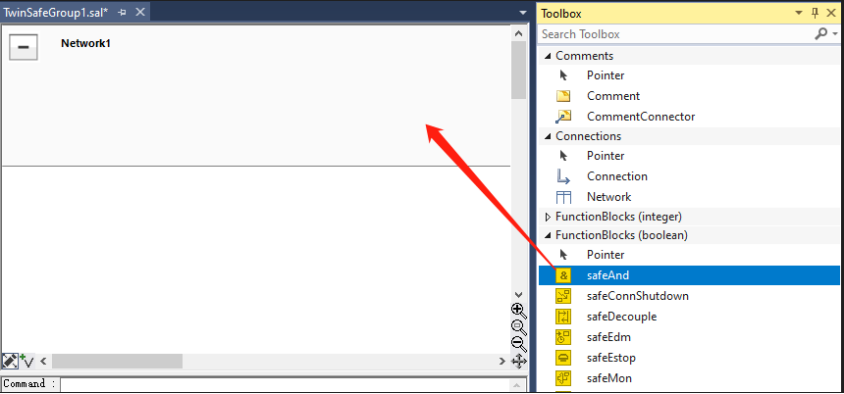
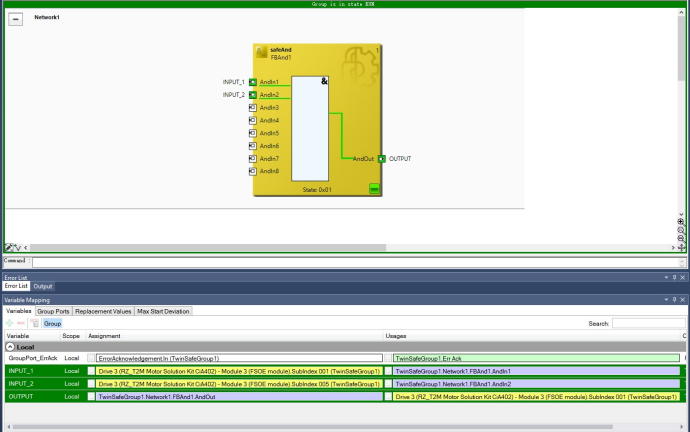
8.2.7 创建安全功能块
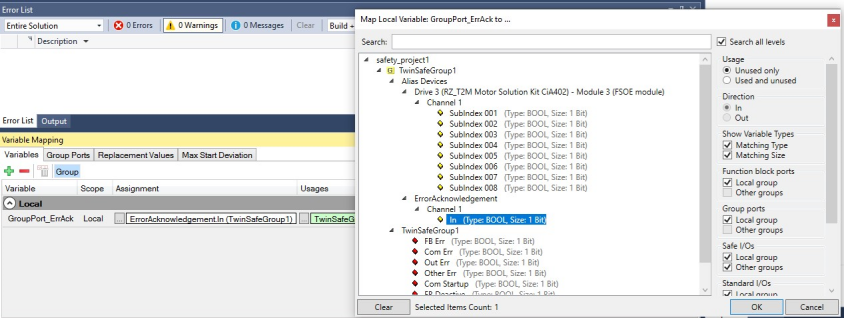
8.2.8 给功能块分配变量
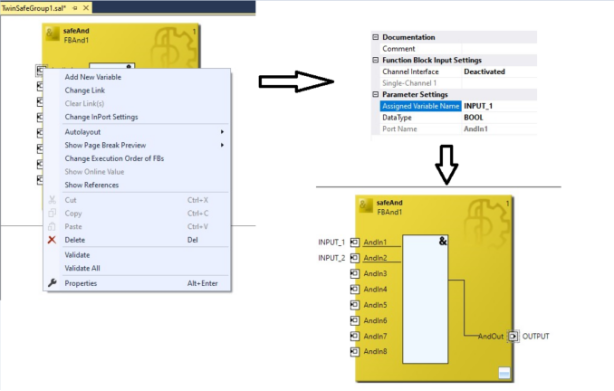
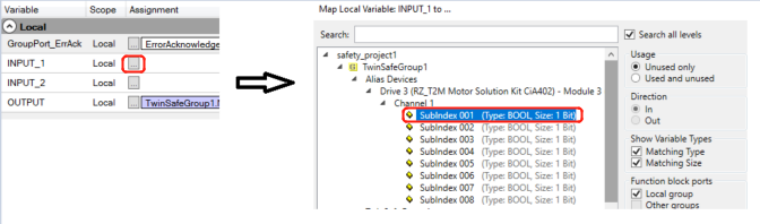
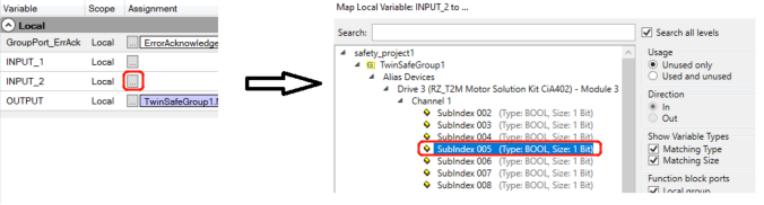
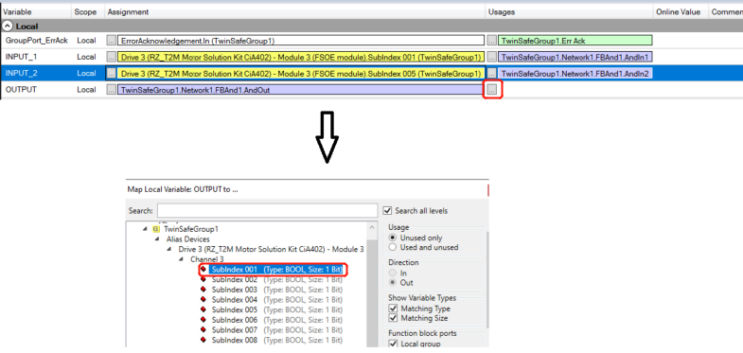
8.2.9 分配变量映射通道
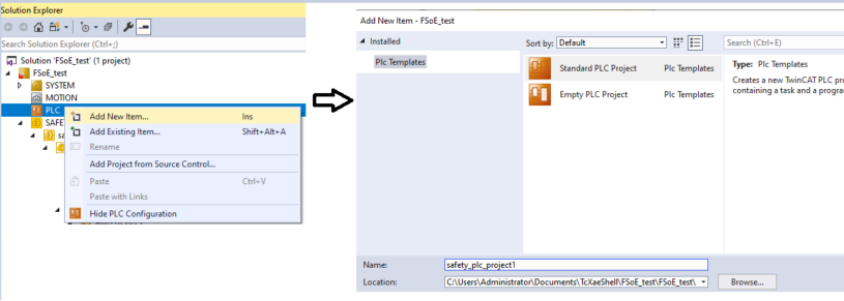
8.2.10 创建PLC工程
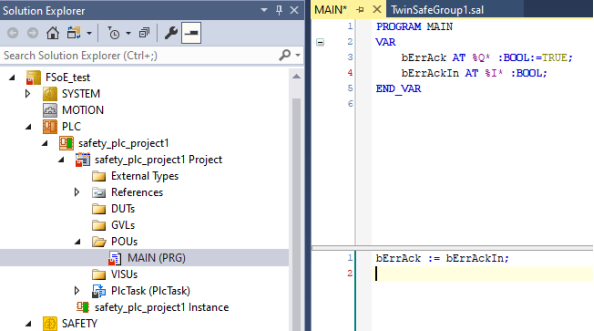
8.2.11 编写PLC程序如下
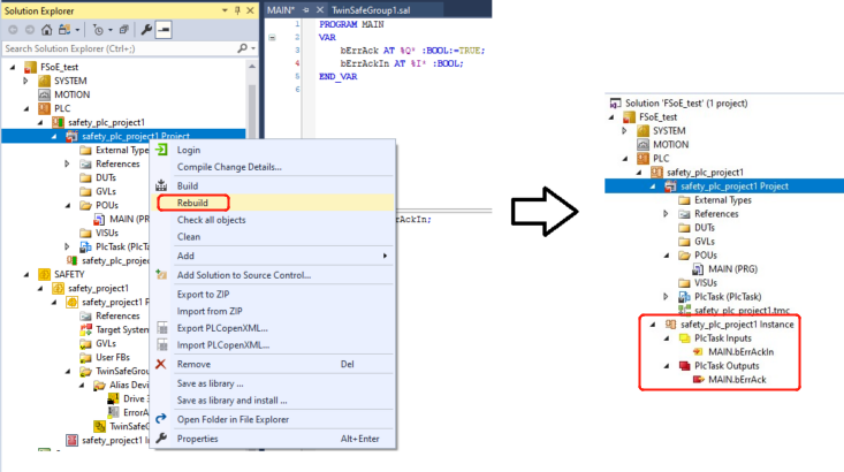
8.2.12 编译工程Rebuild生成对应的bErrAck和bErrAckIn变量。
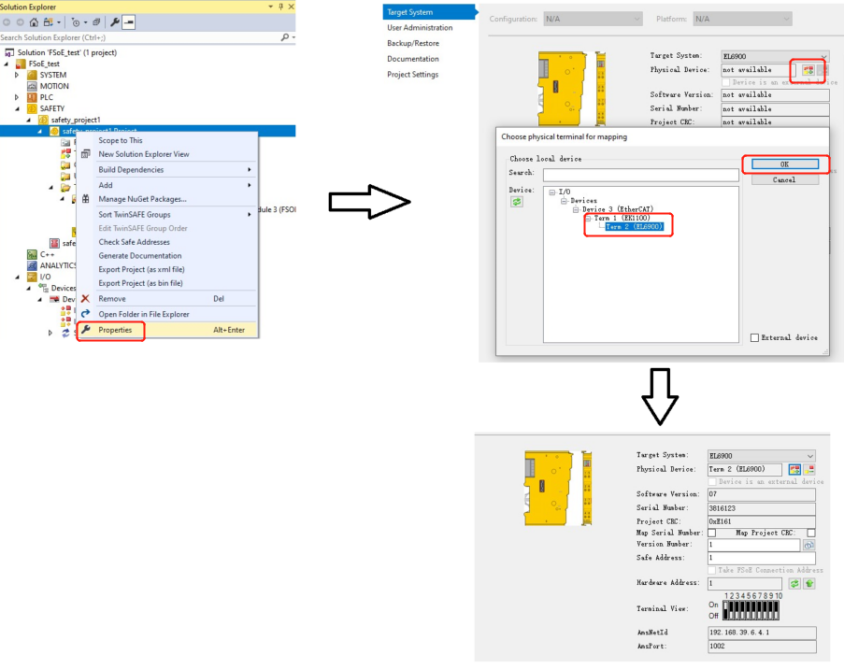
8.2.13注册绑定FSoE主站硬件,拷贝序列号Series Number,将在后续下载步骤中使用到,保存设置。
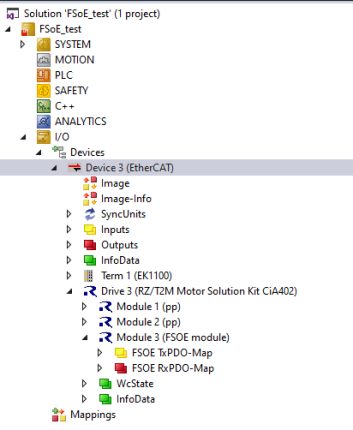
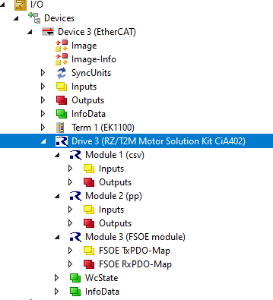
8.2.14 双击Drive3确保FSoE从站设备如下
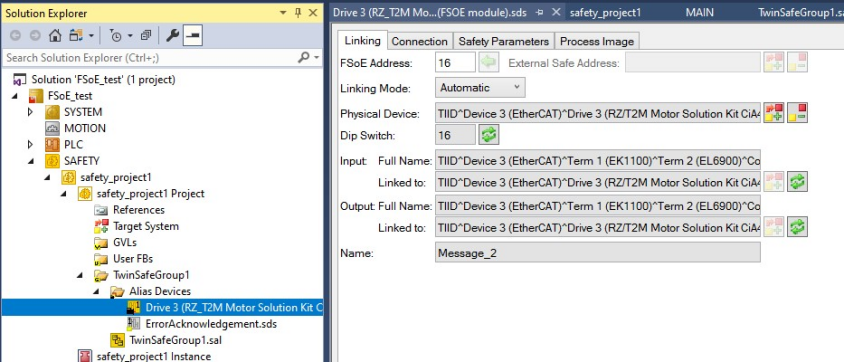
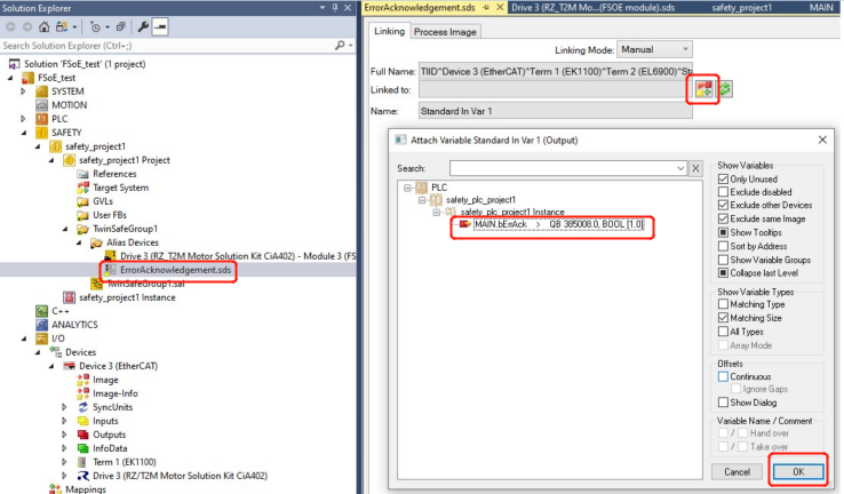
8.2.15 设置链接ErrAck信号
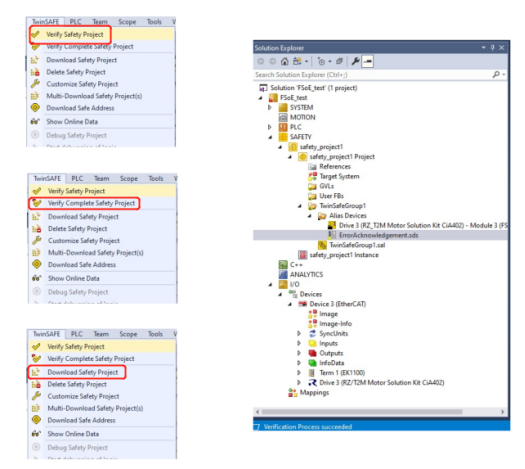
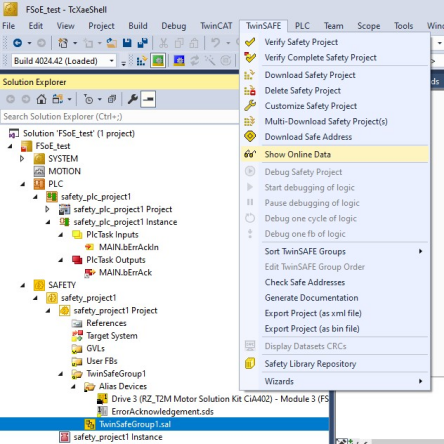
8.2.16 下载FSoE主站安全配置,用户名Administrator,序列号见上述7.2.13,密码是TwinSAFE
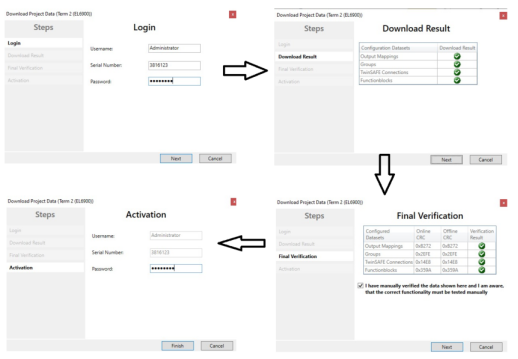
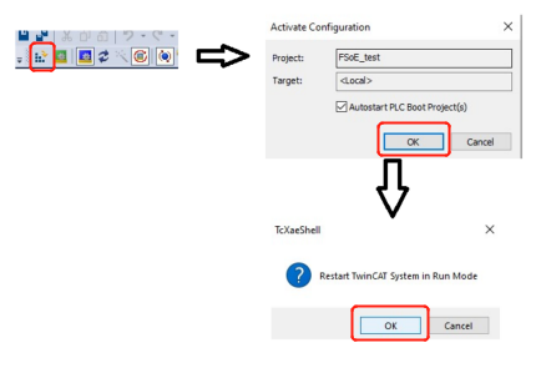
8.2.17 激活主站配置
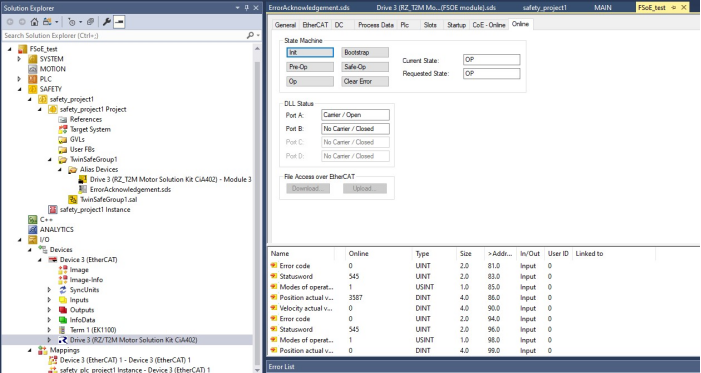
8.2.18 此时从站处于op状态
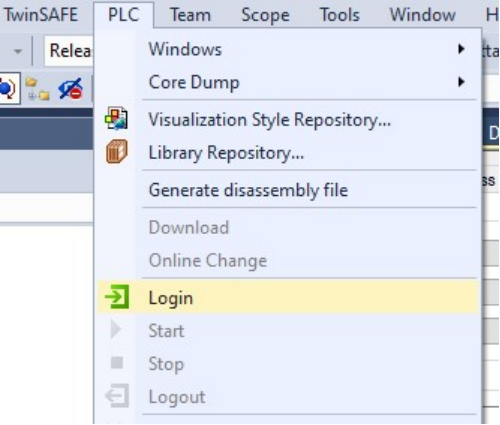
8.2.19 登录启动主站,默认配置登录时会自动启动,如无自动启动,则需手动点击start。
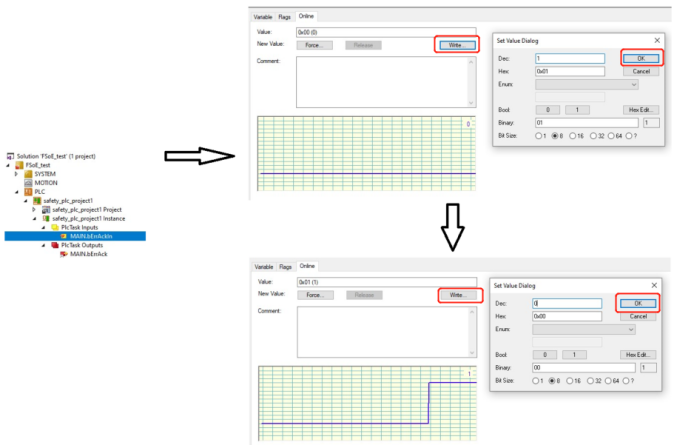
8.2.20 至此软件下载结束,FSoE安全模块红灯闪烁,需复位清除错误:对bErrAckIn写1然后再写0,红灯闪烁消失。
8.2.21 在线监控通讯状态
九功能验证
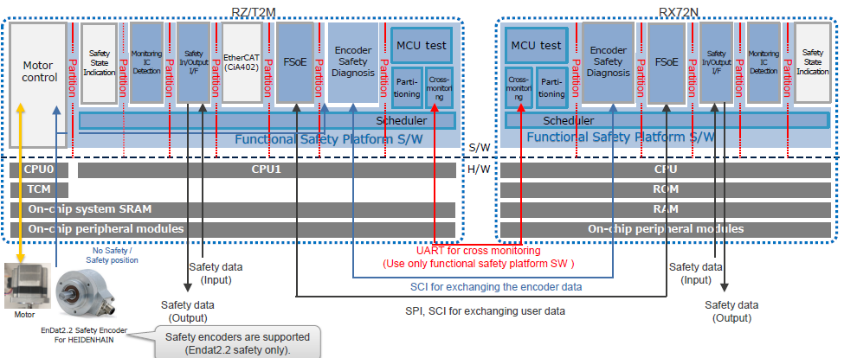
基于上述步骤完成的安全平台软件样例工程提供了完整软件代码框架,包括FSoE软件和SIL3平台软件以及自检软件。如图架构在硬件上的功能安全平台软件PLSW可实现自检功能和双处理器之间的交叉监控,安全数据通讯(通过SCI串口通道)等安全功能。PLSW支持16种user application,高达32个application,各个application之间通过时间片轮询调度执行,每个application的轮询顺序,执行占用时间和内存空间,都是通过工程路径下的PSW_user_setting.h文件来设置,该文件可通过手动或者官方提供的PLSW_ConfigTool来修改。
RZ CPU0实现电机控制应用,RZ CPU1部署了PLSW和各种不同的user application:包括安全状态led指示应用,电源监控应用,安全IO数据应用,ECAT通讯应用,FSoE应用和安全编码器诊断应用。接下来章节就从实际功能验证角度出发,说明如何在开发板上测试验证。
9.1电机控制功能验证
默认支持pp,pv,hm,csp,csv模式,通过修改控制字等,可实现不同模式下的电机运行。
可使用以下参数设置调试PP模式和CSV模式
PP模式
Control word:128 -> 7 -> 15
Status word:0x0221
Target position:20000
Profile velocity:500
Profile acceleration:100
Profile deceleration:100
Profile jerk1:0
Profile jerk2:0
Control word:31
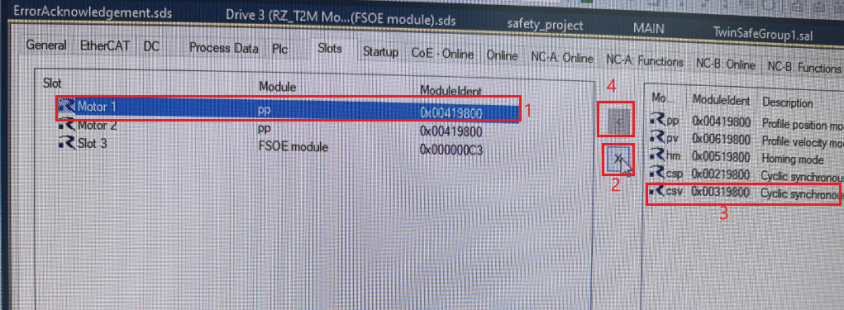
点击slot界面,删除PP模式,选择CSP模式,之后1选择reload重新加载配置,再点击激活在线配置2。

CSV模式设置
在twincat下设置设置控制字为Control word:128 -> 7->15,设置目标速度值为Target velocity:500(500rpm,range of 500 to 1000),此时电机运转起来
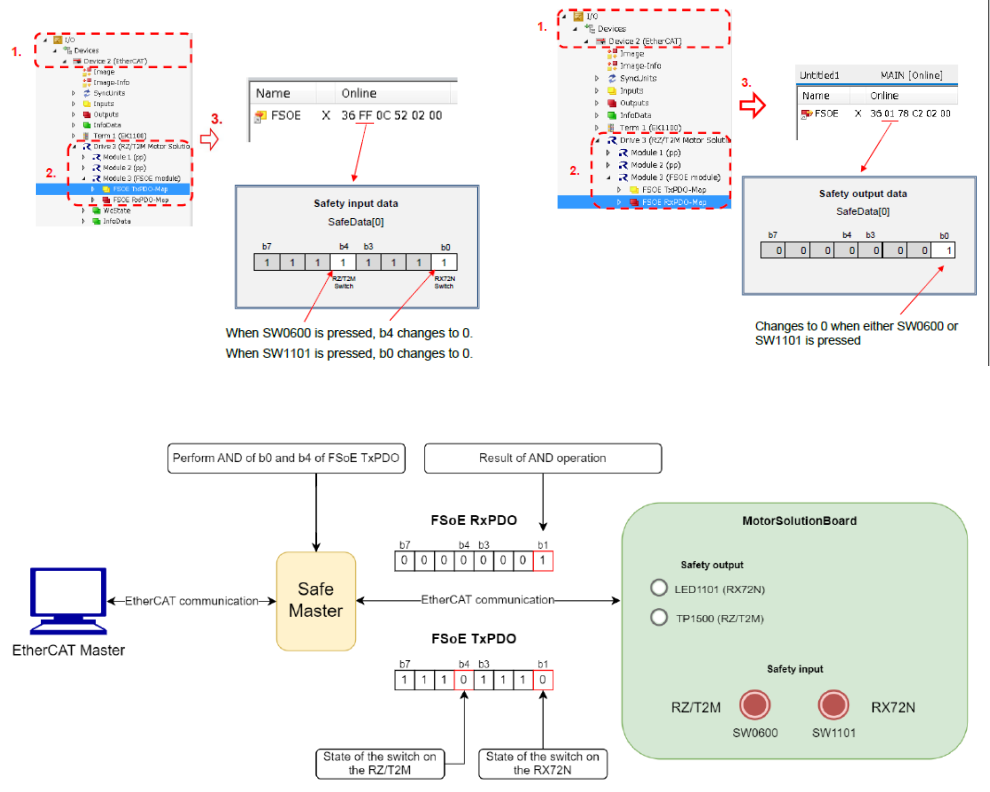
9.2安全输入输出数据验证
板子按键SW0600和SW1101对应安全输入INPUT_1A和INPUT_1B,安全输出OUTPUT对应LED1101,模拟FSoE急停emergency stop控制,按下SW0600或者SW1101,此时板子LED0509,LED1103亮,表示进入安全控制状态(急停)。
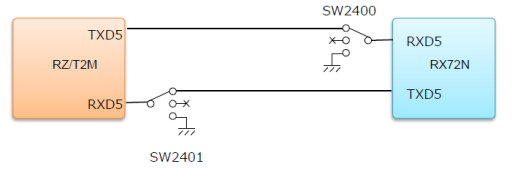
9.3交叉监控功能验证
部署在RZT2M和RX72N的安全平台软件通过串口SCI实现交叉监控,板子正常运行时,设置板子上的开关SW2400或者SW2401,使串口连线断开,两个灯LED0509,LED1103亮,表示进入安全控制状态,通讯中断,电机运行停止。
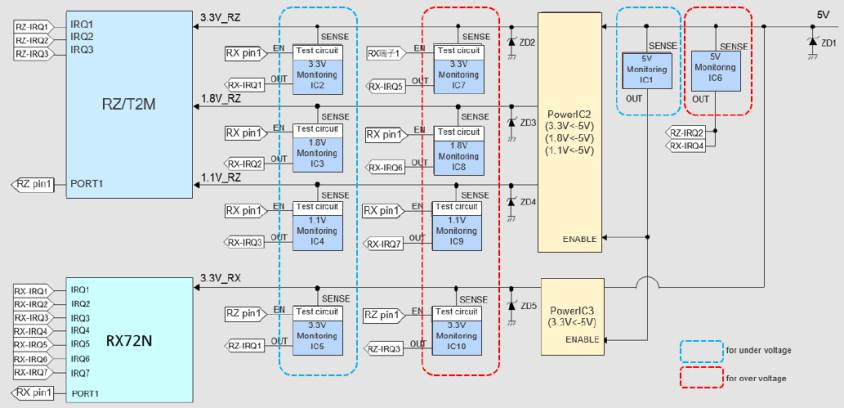
9.4电压监控功能验证
电压监控IC(ISL88014IH5Z)连接到RZT2M 5.0V/3.3V/1.8V/1.1V电源线和RX72N 5.0V/3.3V电源线,用于监控过压/欠压。
对于RZT2M,开关SW1800模拟实现对5V电压监控,SW2100或者SW2102模拟实现对3.3V电压监控,开关SW2200或者SW2202模拟实现对1.8V电压监控,开关SW2201或者SW2203模拟实现对1.1V的监控。
对于RX72N,开关SW1800模拟实现对5V电压监控,开关SW2101或者SW2103模拟实现对3.3V监控。
通过设置对应开关,可以使正常运行时的板子进入安全控制状态,此时两个灯LED0509,LED1103亮,通讯中断,电机运行停止。
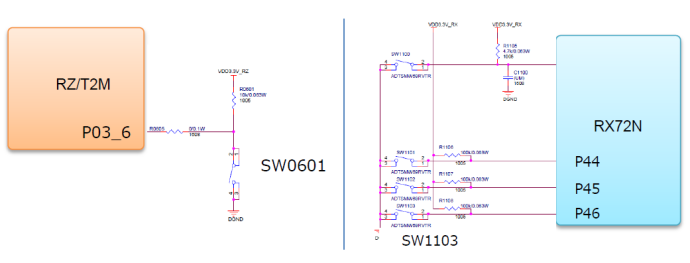
9.5外部按键检测功能验证
按键SW0601或者SW1103模拟实现对外部输入检测,按下按键,可以使正常运行时的板子进入安全控制状态,此时两个灯LED0509,LED1103亮,通讯中断,电机运行停止。
-
Renesas RZ/T2M Starter Kit+:功能特性与使用指南2025-12-29 93
-
RZ/T2M、RZ/N2L、RZ/T2L组 硬件设计指南2024-02-02 596
-
RZ/T2M、RZ/N2L和RZ/T2L产品简介2023-11-13 5456
-
RZ/T2M 组用户手册:硬件2023-06-30 364
-
RZ/T2M 组数据表2023-01-10 399
全部0条评论

快来发表一下你的评论吧 !
