

C语言源程序的数字滤波算法介绍(九种)
控制/MCU
描述
假定从8位AD中读取数据(如果是更高位的AD可定义数据类型为int),子程序为get_ad();
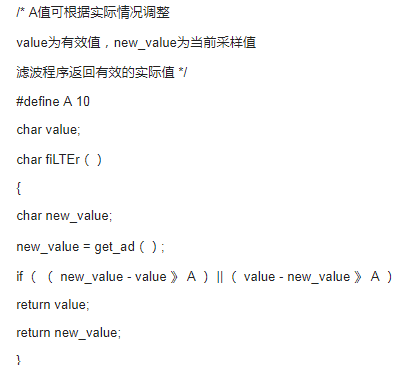
1、限副滤波
2、中位值滤波法
/* N值可根据实际情况调整
排序采用冒泡法*/
#define N 11
char filter()
{
char value_buf[N];
char count,i,j,temp;
for ( count=0;count《N;count++)
{
value_buf[count] = get_ad();
delay();
}
for (j=0;j《N-1;j++)
{
for (i=0;i《N-j;i++)
{
if ( value_buf[i]》value_buf[i+1] )
{
temp = value_buf[i];
value_buf[i] = value_buf[i+1];
value_buf[i+1] = temp;
}
}
}
return value_buf[(N-1)/2];
}
3、算术平均滤波法

4、递推平均滤波法(又称滑动平均滤波法)
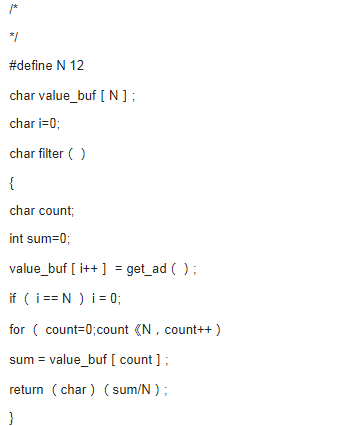
5、中位值平均滤波法(又称防脉冲干扰平均滤波法)
/*
*/
#define N 12
char filter()
{
char count,i,j;
char value_buf[N];
int sum=0;
for (count=0;count《N;count++)
{
value_buf[count] = get_ad();
delay();
}
for (j=0;j《N-1;j++)
{
for (i=0;i《N-j;i++)
{
if ( value_buf[i]》value_buf[i+1] )
{
temp = value_buf[i];
value_buf[i] = value_buf[i+1];
value_buf[i+1] = temp;
}
}
}
for(count=1;count《N-1;count++)
sum += value[count];
return (char)(sum/(N-2));
}
6、限幅平均滤波法
/*
*/
略 参考子程序1、3
7、一阶滞后滤波法
/* 为加快程序处理速度假定基数为100,a=0~100 */
#define a 50
char value;
char filter()
{
char new_value;
new_value = get_ad();
return (100-a)*value + a*new_value;
}
8、加权递推平均滤波法
/* coe数组为加权系数表,存在程序存储区。*/
#define N 12
char code coe[N] = {1,2,3,4,5,6,7,8,9,10,11,12};
char code sum_coe = 1+2+3+4+5+6+7+8+9+10+11+12;
char filter()
{
char count;
char value_buf[N];
int sum=0;
for (count=0,count《N;count++)
{
value_buf[count] = get_ad();
delay();
}
for (count=0,count《N;count++)
sum += value_buf[count]*coe[count];
return (char)(sum/sum_coe);
}
9、消抖滤波法
#define N 12
char filter()
{
char count=0;
char new_value;
new_value = get_ad();
while (value !=new_value);
{
count++;
if (count》=N) return new_value;
delay();
new_value = get_ad();
}
return value;
}
-
如何用单片机实现数字滤波?6种数字滤波算法解析2018-02-28 9535
-
单片机数据采集——数字滤波算法2012-02-20 15863
-
【TL6748 DSP申请】数字滤波器的设计2015-09-10 2126
-
单片机数字滤波的算法2018-10-30 1619
-
浅析嵌入式测控系统的数字滤波算法2019-07-29 1492
-
采用软件算法实现数字滤波2022-01-18 1562
-
软件算法实现数字滤波问题2022-01-20 1229
-
数字信号处理C语言程序集2008-10-30 803
-
wince 源程序 (C语言)2009-03-25 383
-
10种简单的数字滤波算法(C语言源程序)2009-07-16 17986
-
B样条曲线曲面和NURBS曲线曲面_C语言算法源程序2016-02-29 1429
-
用C语言实现数字滤波2016-07-26 906
-
数字滤波器的设计方法及步骤详解2018-04-20 131648
-
嵌入式测控系统中数字滤波算法的实现2021-07-30 807
-
数字滤波器是什么 数字滤波器的性能指标2023-02-24 6612
全部0条评论

快来发表一下你的评论吧 !
