

迅为RK3568开发板驱动指南Linux中通用SPI设备驱动
描述
在前面的章节中我们从0开始编写了一个mcp2515的驱动程序,而跟I2C设备类似,在Linux内核中也有着通用SPI设备驱动,在本章节将会讲解通用SPI设备驱动的使用,并讲解如何在应用程序中通过ioctl对SPI进行配置和使用。
硬件:迅为RK3568开发板

193.1 内核和设备树配置
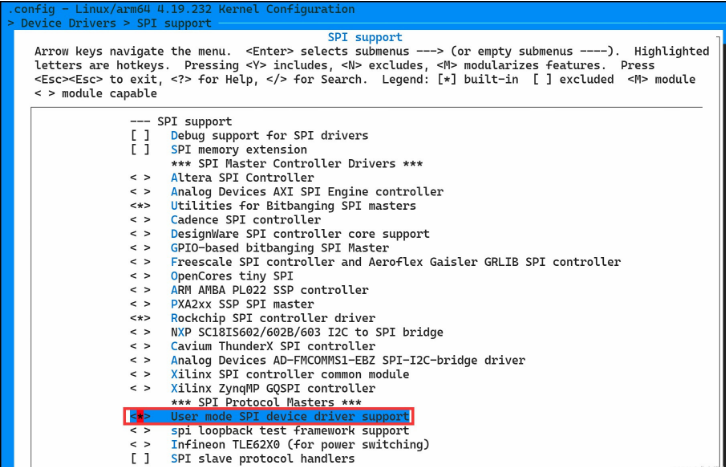
通用SPI设备驱动在迅为提供的Linux内核中默认已经勾选了,具体路径如下所示:
> Device Drivers
> SPI support
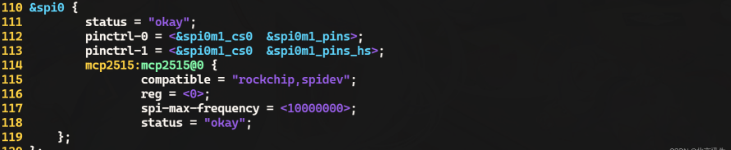
除了内核支持之外,还需要修改设备树,由于之前已经使能了SPI0,所以这直接修改之前编写的mcp2515设备树节点,具体设备树为“kernel/arch/arm64/boot/dts/rockchip/rk3568-evb1-ddr4-v10.dtsi”,修改完成的mcp2515节点如下所示:rockchip,spidev
&spi0 {
status = "okay";
pinctrl-0 = <&spi0m1_cs0 &spi0m1_pins>;
pinctrl-1 = <&spi0m1_cs0 &spi0m1_pins_hs>;
mcp2515:mcp2515@0 {
compatible = "rockchip,spidev";
reg = <0>;
spi-max-frequency = <10000000>;
status = "okay";
};
};
保存退出之后,重新编译内核源码,最后将编译得到的boot.img烧写到开发板上。
而为了方便起见,迅为已经将修改完成的设备树以及编译完成的内核镜像放到了“iTOP-3568开发板\03_【iTOP-RK3568开发板】指南教程\02_Linux驱动配套资料\04_Linux驱动程序\119_mcp2515_07\01_编译好的内核镜像”路径下。
开发板启动之后,如果存在/dev/spidev0.0设备节点,证明设备树及内核配置正确,如下图所示:

/dev/spidev0.0 表示一个 SPI 总线上的具体设备。0.0 是一个标识符,用于区分系统中的不同 SPI 控制器和设备。这个标识符由两部分组成:
第一个数字 0:表示SPI总线的编号。一个系统中可能有多个SPI控制器,每个控制器对应一个总线编号,从0开始。
第二个数字0:表示连接在该SPI总线上的具体设备编号。一个SPI总线上可以连接多个设备,每个设备通过片选信号(Chip Select, CS)进行区分,设备编号从0开始。
在下个小节中,将会讲解内核源码中携带的spidev_test SPI测试程序进行讲解。
193.2 spidev_test工具使用
spidev_test是一个用于测试和调试SPI设备的命令行工具,通常在Linux系统上使用,它允许用户直接通过SPI总线与设备进行通信,可以发送数据并接收来自设备的响应。
spidev_test源码位于Linux源码的kernel/tools/spi目录下,如下图所示:

然后使用以下命令对该工具进行交叉编译
make CC=/home/topeet/Linux/linux_sdk/prebuilts/gcc/linux-x86/aarch64/gcc-linaro-6.3.1-2017.05-x86_64_aarch64-linux-gnu/bin/aarch64-linux-gnu-gcc LD=/home/topeet/Linux/linux_sdk/prebuilts/gcc/linux-x86/aarch64/gcc-linaro-6.3.1-2017.05-x86_64_aarch64-linux-gnu/bin/aarch64-linux-gnu-ld
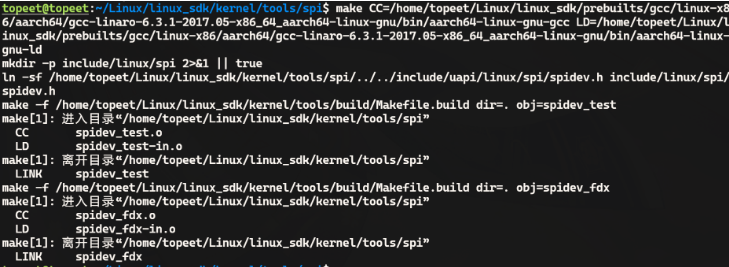
编译好的文件如下图所示。

然后将编译好的可执行文件spidev_fdx和spidev_test拷贝到开发板上使用即可。接下来介绍一下工具的使用方法
1.spidev_test工具的使用:
基本介绍:spidev_test是一个用于测试和验证Linux中SPI设备驱动程序的用户空间工具。它使用spidev接口与SPI设备通信。这个工具主要用来检查SPI设备是否工作正常,以及对SPI设备进行基本的读写操作。
主要选项和参数
-D /dev/spidevX.Y:指定要测试的 SPI 设备节点。
-s :设置 SPI 时钟频率(以 Hz 为单位),例如 -s 1000000 表示 1 MHz。
-d :设置数据传输之间的延迟时间(以微秒为单位)。
-b :设置每个数据字的位数,通常是 8 或 16。
-H:以十六进制模式显示传输的数据。
(3)示例操作
读取设备信息:
spidev_test -D /dev/spidevX.Y -s 1000000

这会使用 1 MHz 的时钟频率从 SPI 设备读取数据,默认情况下以十六进制显示。
写入和读取数据:
spidev_test -D /dev/spidevX.Y -s 1000000 -b 8 -d 1000 -H -p 'hello'

这条命令会向 SPI 设备写入字符串 'hello',并以十六进制模式显示设备的响应数据。-b 8 指定每个字的位数为 8,-d 1000 设置 1000 微秒的延迟。
连续传输:
spidev_test -D /dev/spidevX.Y -s 1000000 -b 8 -p 'abcdefgh'
这个示例将连续发送字节 'abcdefgh' 到 SPI 设备。

2.spidev_fdx工具的使用
(1)基本介绍:spidev_fdx 是一个用于全双工 SPI 通信测试的命令行工具,主要用于在 Linux 系统上与 SPI 设备进行双向数据传输和测试。
(2)主要选项和参数
-D /dev/spidevX.Y:指定要测试的 SPI 设备节点。
-s :设置 SPI 时钟频率(以 Hz 为单位),例如 -s 1000000 表示 1 MHz。
-w :指定要写入到 SPI 设备的数据,可以是十六进制或 ASCII 格式的字符串。
-r :指定从 SPI 设备读取的数据大小(以字节为单位)。
-b :设置每个数据字的位数,通常是 8 或 16。
-d :设置数据传输之间的延迟时间(以微秒为单位)。
(3)示例操作
以下是几个使用 spidev_fdx 工具的示例操作:
发送和接收数据:
spidev_fdx -D /dev/spidevX.Y -s 1000000 -w 'hello' -r 5
这会向 SPI 设备写入字符串 'hello',并从设备读取 5 个字节的响应数据。
设置时钟频率和延迟:
spidev_fdx -D /dev/spidevX.Y -s 500000 -d 200 -w 'abcdef' -r 10
这个示例将 SPI 时钟频率设置为 500 kHz,数据写入延迟为 200 微秒,并向设备写入字符串 'abcdef',然后读取 10 个字节的响应数据。
193.3 应用程序中如何使用SPI
在第一个小节中使能了内核中的通用SPI,而在第二小节讲解了spidev_test工具的使用,在本小节将根据spidev_test工具的源码,编写mcp2515通用SPI驱动程序的应用程序。
在应用程序中可以通过ioctl来获取和配置SPI的相关属性,并实现SPI数据的发送和接收,SPI的ioctl宏定义在“/usr/include/linux/spi/spidev.h”,部分ioctl cmd如下所示:
/* 读取 / 写入 SPI 模式(SPI_MODE_0..SPI_MODE_3)(限制为 8 位) */
#define SPI_IOC_RD_MODE _IOR(SPI_IOC_MAGIC, 1, __u8) // 读取 SPI 模式
#define SPI_IOC_WR_MODE _IOW(SPI_IOC_MAGIC, 1, __u8) // 写入 SPI 模式
/* 读取 / 写入 SPI 位顺序 */
#define SPI_IOC_RD_LSB_FIRST _IOR(SPI_IOC_MAGIC, 2, __u8) // 读取 SPI 低位优先
#define SPI_IOC_WR_LSB_FIRST _IOW(SPI_IOC_MAGIC, 2, __u8) // 写入 SPI 低位优先
/* 读取 / 写入 SPI 设备字长(1..N) */
#define SPI_IOC_RD_BITS_PER_WORD _IOR(SPI_IOC_MAGIC, 3, __u8) // 读取 SPI 每字位数
#define SPI_IOC_WR_BITS_PER_WORD _IOW(SPI_IOC_MAGIC, 3, __u8) // 写入 SPI 每字位数
/* 读取 / 写入 SPI 设备默认最大速度(Hz) */
#define SPI_IOC_RD_MAX_SPEED_HZ _IOR(SPI_IOC_MAGIC, 4, __u32) // 读取 SPI 最大速度(Hz)
#define SPI_IOC_WR_MAX_SPEED_HZ _IOW(SPI_IOC_MAGIC, 4, __u32) // 写入 SPI 最大速度(Hz)
/* 读取 / 写入 SPI 模式字段 */
#define SPI_IOC_RD_MODE32 _IOR(SPI_IOC_MAGIC, 5, __u32) // 读取 SPI 模式(32 位)
#define SPI_IOC_WR_MODE32 _IOW(SPI_IOC_MAGIC, 5, __u32) // 写入 SPI 模式(32 位)
可以通过上述ioctl cmd来对SPI设备进行初始化,编写完成的初始化函数如下所示:
int fd; // SPI设备文件描述符
int mode = SPI_MODE_0; // SPI模式
int bits = 8; // 每字比特数
int speed = 10000000; // 最大SPI总线速度(Hz)
int spi_init(void){
int ret;
// 打开SPI设备文件
fd = open("/dev/spidev0.0", O_RDWR);
if(fd < 0){
printf("打开 /dev/spidev0.0 错误\n");
return -1;
}
/*
* 设置SPI模式
*/
ret = ioctl(fd, SPI_IOC_WR_MODE32, &mode);
if (ret == -1)
printf("无法设置SPI模式\n");
ret = ioctl(fd, SPI_IOC_RD_MODE32, &mode);
if (ret == -1)
printf("无法获取SPI模式\n");
/*
* 设置每字比特数
*/
ret = ioctl(fd, SPI_IOC_WR_BITS_PER_WORD, &bits);
if (ret == -1)
printf("无法设置每字比特数\n");
ret = ioctl(fd, SPI_IOC_RD_BITS_PER_WORD, &bits);
if (ret == -1)
printf("无法获取每字比特数\n");
/*
* 设置最大传输速度
*/
ret = ioctl(fd, SPI_IOC_WR_MAX_SPEED_HZ, &speed);
if (ret == -1)
printf("无法设置最大传输速度\n");
ret = ioctl(fd, SPI_IOC_RD_MAX_SPEED_HZ, &speed);
if (ret == -1)
printf("无法获取最大传输速度\n");
printf("SPI模式: 0x%x\n", mode);
printf("每字比特数: %d\n", bits);
printf("最大速度: %d Hz (%d KHz)\n", speed, speed / 1000);
return 0;
}
通过该函数可以设置SPI的模式、比特数以及最大传输速度,然后根据spidev_test工具源码的传输函数来编写传输函数,具体函数内容如下所示:
/*
* 执行SPI数据传输.
* 参数:
* fd - SPI设备文件描述符
* tx - 发送缓冲区
* rx - 接收缓冲区
* len - 数据长度
* 返回0表示成功,-1表示失败.
*/
int transfer(int fd, char *tx, char *rx, int len)
{
int ret;
struct spi_ioc_transfer tr = {
.tx_buf = (unsigned long)tx,
.rx_buf = (unsigned long)rx,
.len = len,
.delay_usecs = delay,
.speed_hz = speed,
.bits_per_word = bits,
};
ret = ioctl(fd, SPI_IOC_MESSAGE(1), &tr);
if (ret < 1){
printf("无法发送SPI消息\n");
return -1;
}
return 0;
}
在前面的章节中一步步的编写了mcp2515的复位函数、配置函数、读函数和写函数,而现在可以直接在应用程序通过刚刚编写的传输函数向SPI设备发送一系列的SPI指令,一个编写完成的mcp2515的应用程序代码如下所示:
#include
#include
#include
#include
#include
#include
#include
#define RESET 0xc0 // 复位命令
#define CANSTAT 0x0e // CAN状态寄存器地址
#define READ 0x03 // 读命令
#define CANCTRL 0x0f // CAN控制寄存器地址
#define WRITE 0x02 // 写命令
int fd; // SPI设备文件描述符
int mode = SPI_MODE_0; // SPI模式
int bits = 8; // 每字比特数
int speed = 10000000; // 最大SPI总线速度(Hz)
int delay; // 延迟时间(微秒)
/*
* 初始化SPI通信.
* 返回0表示成功,-1表示失败.
*/
int spi_init(void){
int ret;
// 打开SPI设备文件
fd = open("/dev/spidev0.0", O_RDWR);
if(fd < 0){
printf("打开 /dev/spidev0.0 错误\n");
return -1;
}
/*
* 设置SPI模式
*/
ret = ioctl(fd, SPI_IOC_WR_MODE32, &mode);
if (ret == -1)
printf("无法设置SPI模式\n");
ret = ioctl(fd, SPI_IOC_RD_MODE32, &mode);
if (ret == -1)
printf("无法获取SPI模式\n");
/*
* 设置每字比特数
*/
ret = ioctl(fd, SPI_IOC_WR_BITS_PER_WORD, &bits);
if (ret == -1)
printf("无法设置每字比特数\n");
ret = ioctl(fd, SPI_IOC_RD_BITS_PER_WORD, &bits);
if (ret == -1)
printf("无法获取每字比特数\n");
/*
* 设置最大传输速度
*/
ret = ioctl(fd, SPI_IOC_WR_MAX_SPEED_HZ, &speed);
if (ret == -1)
printf("无法设置最大传输速度\n");
ret = ioctl(fd, SPI_IOC_RD_MAX_SPEED_HZ, &speed);
if (ret == -1)
printf("无法获取最大传输速度\n");
printf("SPI模式: 0x%x\n", mode);
printf("每字比特数: %d\n", bits);
printf("最大速度: %d Hz (%d KHz)\n", speed, speed / 1000);
return 0;
}
/*
* 执行SPI数据传输.
* 参数:
* fd - SPI设备文件描述符
* tx - 发送缓冲区
* rx - 接收缓冲区
* len - 数据长度
* 返回0表示成功,-1表示失败.
*/
int transfer(int fd, char *tx, char *rx, int len)
{
int ret;
struct spi_ioc_transfer tr = {
.tx_buf = (unsigned long)tx,
.rx_buf = (unsigned long)rx,
.len = len,
.delay_usecs = delay,
.speed_hz = speed,
.bits_per_word = bits,
};
ret = ioctl(fd, SPI_IOC_MESSAGE(1), &tr);
if (ret < 1){
printf("无法发送SPI消息\n");
return -1;
}
return 0;
}
int main(int argc, char *argv[]){
char reset_cmd[1] = {RESET}; // 复位命令数组
char rd_canstat[2] = {READ, CANSTAT}; // 读CAN状态寄存器命令数组
char canstat[4] = {0}; // 存储CAN状态的缓冲区
char wr_canctrl[] = {WRITE, CANCTRL, 0x00}; // 写CAN控制寄存器命令数组
// 初始化SPI通信
spi_init();
// 执行SPI数据传输
// 1. 发送复位命令
transfer(fd, reset_cmd, NULL, sizeof(reset_cmd));
// 2. 读取CAN状态
transfer(fd, rd_canstat, canstat, sizeof(canstat));
printf("CAN状态为 %x\n", canstat[2]);
// 清空canstat缓冲区
memset(canstat, 0, sizeof(canstat));
// 3. 写入CAN控制
transfer(fd, wr_canctrl, NULL, sizeof(wr_canctrl));
// 4. 再次读取CAN状态
transfer(fd, rd_canstat, canstat, sizeof(canstat));
printf("CAN状态为 %x\n", canstat[3]);
return 0;
}
193.4 运行测试
193.4.1 编译应用程序
上一小节编写好的app.c应用程序源码已经放在了“iTOP-3568开发板\03_【iTOP-RK3568开发板】指南教程\02_Linux驱动配套资料\04_Linux驱动程序\119_mcp2515_07\02_app”目录下。
首先进行应用程序的编译,因为测试APP是要在开发板上运行的,所以需要aarch64-linux-gnu-gcc来编译,输入以下命令,编译完成以后会生成一个app的可执行程序,如下图所示:
aarch64-linux-gnu-gcc app.c -o app

然后将编译完成的可执行程序拷贝到开发板上.
193.4.2 运行测试
首先将193.1小节编译好的内核镜像烧写到开发板上,然后将可执行程序app文件拷贝到开发板上,拷贝完成如下所示:

然后运行可执行程序app,如下图所示。
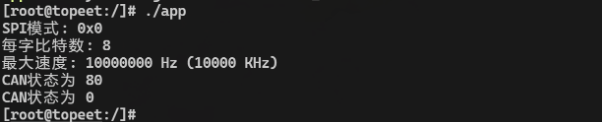
在应用程序中,发送完复位指令之后,第一条打印can状态寄存器的值为80,表示mcp2515已经处在了配置模式。第二条打印can状态寄存器的值为00,表示mcp2515已经处于正常模式,这就说明上一小节编写的应用程序正常运行。
至此,关于通用SPI驱动和在应用程序中使用SPI实验就完成了。
-
北京迅为RK3568开发板OpenHarmony系统南向驱动开发内核HDF驱动框架架构2025-03-11 2180
-
迅为RK3568开发板驱动指南GPIO子系统三级节点操作函数实验2025-05-26 1775
-
迅为基于RK3568开发板的嵌入式学习之Linux驱动视频2023-05-19 2250
-
迅为RK3568开发板驱动开发指南-输入子系统2024-02-23 2682
-
北京迅为RK3568开发板嵌入式学习之Linux驱动全新更新-CAN+2024-09-04 1949
-
迅为RK3568开发板SPI驱动指南-mcp2515驱动编写:读寄存器函数2025-01-20 2096
-
【技术分享】迅为RK3568开发板使用TFTP加载内核设备树2025-02-21 1635
-
迅为RK3568驱动指南GPIO子系统 GPIO操作函数实验2025-05-28 1659
-
迅为RK3568开发板驱动指南GPIO子系统GPIO子系统API函数的引入2025-05-29 1326
-
技术分享 | 迅为RK3568开发板如何将 Linux 板卡虚拟成U盘2025-06-04 1491
-
迅为RK3568 重制版RK3568驱动指南全面升级2025-07-28 4128
-
避坑指南!RK3568开发板选型,这5点没看清千万别下手!(附迅为驱动开发指南资源)2025-10-30 1293
-
【迅为工业RK3568稳定可靠】itop-3568开发板驱动开发第4章驱动模块传参实验2025-11-06 662
-
【迅为工业RK3568稳定可靠】itop-3568开发板Linux驱动开发实战:RK3568内核模块符号导出详解2025-11-21 2065
-
迅为驱动开发实战:iTOP-RK3568开发板eDP屏幕移植全攻略2025-12-30 1524
全部0条评论

快来发表一下你的评论吧 !
