

CW32模块使用 红外接收模块
描述
一、模块来源
模块实物展示:
资料链接:https://pan.baidu.com/s/1dEWVMIFDWb7k1NcsRy5hHA
资料提取码:uucv
二、规格参数
1.CR2025环保纽扣电池,容量160mah
2.发射距离:8m以上(具体和周围环境、接收端的灵敏度等因素有关)
3.有效角度:60度
4.面贴材料:0.125mmPET,有效寿命2万次。
5.品质稳定,性价比高
6.静态电流3-5uA,动态电流3-5mA。
以上信息见厂家资料文件
三、移植过程
我们的目标是将例程移植至CW32F030C8T6开发板上【能够实现红外信号接收的功能】。首先要获取资料,查看数据手册应如何实现读取数据,再移植至我们的工程。
3.1查看资料
在光谱中波长自760nm至400um的电磁波称为红外线,它是一种不可见光。红外线通信的例子我们每个人应该都很熟悉,目前常用的家电设备几乎都可以通过红外遥控的方式进行遥控,比如电视机、空调、投影仪等,都可以见到红外遥控的影子。这种技术应用广泛,相应的应用器件都十分廉价,因此红外遥控是我们日常设备控制的理想方式。
红外线的通讯原理
红外光是以特定的频率脉冲形式发射,接收端收到到信号后,按照约定的协议进行解码,完成数据传输。在消费类电子产品里,脉冲频率普遍采用 30KHz 到 60KHz 这个频段,NEC协议的频率就是38KHZ。这个以特定的频率发射其实就可以理解为点灯,不要被复杂的词汇难住了,就是控制灯的闪烁频率(亮灭),和刚学单片机完成闪烁灯一样的意思,只不过是灯换了一种类型,都是灯。
接收端的原理: 接收端的芯片对这个红外光比较敏感,可以根据有没有光输出高低电平,如果发送端的闪烁频率是有规律的,接收端收到后输出的高电平和低电平也是有规律对应的,这样发送端和接收端只要约定好,那就可以做数据传输了。
红外线传输协议可以说是所有无线传输协议里成本最低,最方便的传输协议了,但是也有缺点,距离不够长,速度不够快;当然,每个传输协议应用的环境不一样,定位不一样,好坏没法比较,具体要看自己的实际场景选择合适的通信方式。
NEC协议介绍
NEC协议是众多红外线协议中的一种(这里说的协议就是他们数据帧格式定义不一样,数据传输原理都是一样的),我们购买的外能遥控器、淘宝买的mini遥控器、电视机、投影仪几乎都是NEC协议。像格力空调、美的空调这些设备使用的就是其他协议格式,不是NEC协议,但是只要学会一种协议解析方式,明白了红外线传输原理,其他遥控器协议都可以解出来。
NEC协议一次完整的传输包含: 引导码、8位地址码、8位地址反码、8位命令码、8位命令反码。这里我们主要讲解如何接收红外发送端发送的NEC协议内容。

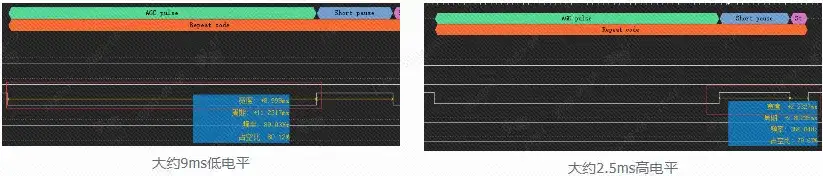
引导码:由9ms的低电平+4.5ms的高电平组成。
4个字节的数据: 地址码+地址反码+命令码+命令反码。这里的反码可以用来校验数据是否传输正确,有没有丢包。
重点: NEC协议传输数据位的时候,0和1的区分是依靠收到的高、低电平的持续时间来进行区分的。这是解码关键。
数据发送0码:0.56ms低电平+ 0.56ms的高电平。
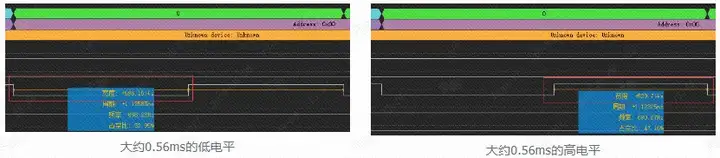
数据发送1码:0.56ms低电平+1.68ms的高电平
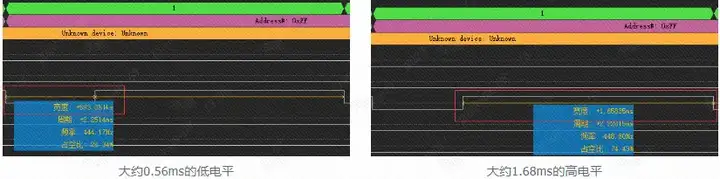
所以,收到一个数据位的完整时间表示方法是这样的:
收到数据位0: 0.56ms低电平+ 0.56ms的高电平
收到数据位1: 0.56ms低电平+1.68ms的高电平
还有一个重复码,它是由一个 9ms 的低电平和一个 2.5ms 的高电平组成。当一个红外信号连续发送时,可以通过发送重复码的方式快速发送。
3.2引脚选择
当红外线接收头感应到有红外光就输出低电平,没有感应到红外光就输出高电平。因此我们配置红外引脚为外部中断下降沿触发方式,当红外引脚有下降沿时,我们马上进入中断处理并接收红外信号。
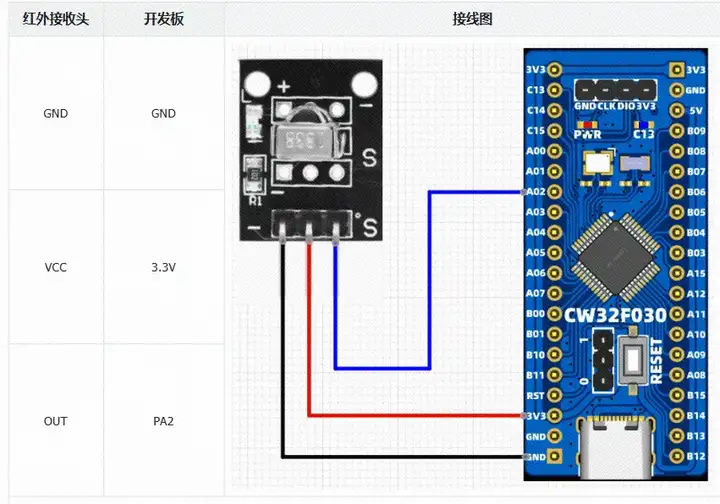
模块接线图
3.3移植至工程
引脚配置如下:
//红外引脚初始化
void infrared_goio_config(void)
{
IR_RCC_GPIO_ENABLE(); // 使能GPIO时钟
GPIO_InitTypeDef GPIO_InitStruct; // GPIO初始化结构体
GPIO_InitStruct.Pins = IR_PIN; // GPIO引脚
GPIO_InitStruct.Mode = GPIO_MODE_INPUT_PULLUP; // 上拉输入
GPIO_InitStruct.Speed = GPIO_SPEED_HIGH; // 速度高
GPIO_InitStruct.IT = GPIO_IT_FALLING; // 下降沿触发中断
GPIO_Init(IR_PORT, &GPIO_InitStruct); // 初始化
// 清除PA0中断标志
GPIOA_INTFLAG_CLR(EXTI_BV);
// 使能NVIC
NVIC_EnableIRQ(EXTI_IRQ);
}
红外信号的数据,全部是以时间长度来确定数据是0还是1,而最小的单位要求有560us,已经达到了us级的测量。
我们在 空白工程中已经为大家准备好了us延时,就在board 文件中。
获取高低电平时间
获取低电平时间的实现代码如下:
//获取红外低电平时间
//以微秒us作为时间参考
void get_infrared_low_time( uint32_t *low_time )
{
uint32_t time_val = 0;
while( GPIO_ReadPin(IR_PORT, IR_PIN) == 0 )
{
if( time_val >= 500 )
{
*low_time = time_val;
return;
}
delay_us(20);
time_val++;
}
*low_time = time_val;
}
当引脚为低电平时,将进入 while 循环,直到不为低电平时就结束循环。在循环之中不断的让时间变量time_val累加, 每加一次需要经过20us。当time_val变量累加时间大于 500 * 20 = 10000us = 10ms时,判断为超时,强行结束该函数,防止阻碍系统运行。
获取高电平时间的代码同理:
//获取红外高电平时间
//以微秒us作为时间参考
void get_infrared_high_time(uint32_t *high_time)
{
uint32_t time_val = 0;
while( GPIO_ReadPin(IR_PORT, IR_PIN) == 1 )
{
if( time_val >= 250 )
{
*high_time = time_val;
return;
}
delay_us(20);
time_val++;
}
*high_time = time_val;
}
引导码与重复码判断
引导码是由一个 9ms 的低电平和一个 4.5ms 的高电平组成。每当接收到一个红外信号时,第一个数据就是引导码。我们通过判断红外信号的第一个数据是否是引导码,来决定是否要进行后面的数据接收处理。
重复码是由一个 9ms 的低电平和一个 2.5ms 的高电平组成。当我们的红外遥控一直按住按键时,就会发出重复码,我们可以检测重复码,来确定是否要连续触发重复动作,比如长按开机,长按加速等等。
/******************************************************************
* 函 数 名 称:guide_and_repeat_code_judgment
* 函 数 说 明:引导 和 重复 码 判断
* 函 数 形 参:无
* 函 数 返 回:1:不是引导码 2:重复码 0:引导码
* 作 者:LC
* 备 注:以20微秒us作为时间参考
引导码:由一个 9ms 的低电平和一个 4.5ms 的高电平组成
重复码:由一个 9ms 的低电平和一个 2.5ms 的高电平组成
******************************************************************/
uint8_t guide_and_repeat_code_judgment(void)
{
uint32_t out_time=0;
get_infrared_low_time(&out_time);
//time >10ms time < 8ms
if((out_time > 500) || (out_time < 400))
{
return 1;
}
get_infrared_high_time(&out_time);
// x >5ms 或者 x< 2ms
if((out_time > 250) || (out_time < 100))
{
return 1;
}
//如果是重复码 2ms < time < 3ms
if((out_time > 100) && (out_time < 150))
{
return 2;
}
return 0;
}
完整红外数据接收
具体接收流程:【判断是否接收到引导码】->【接收数据】->【判断数据是否正确】。
//接收红外数据
void receiving_infrared_data(void)
{
uint16_t group_num = 0,data_num = 0;
uint32_t time=0;
uint8_t bit_data = 0;
uint8_t ir_value[5] = {0};
uint8_t guide_and_repeat_code = 0;
//等待引导码
guide_and_repeat_code = guide_and_repeat_code_judgment();
//如果不是引导码则结束解析
if( guide_and_repeat_code == 1 ) return;
//共有4组数据
//地址码+地址反码+命令码+命令反码
for(group_num = 0; group_num < 4; group_num++ )
{
//接收一组8位的数据
for( data_num = 0; data_num < 8; data_num++ )
{
//接收低电平
get_infrared_low_time(&time);
//如果不在0.56ms内的低电平,数据错误
if((time > 60) || (time < 20))
{
return ;
}
time = 0;
//接收高电平
get_infrared_high_time(&time);
//如果是在1200us< t< 2000us范围内则判断为1
if((time >=60) && (time < 100))
{
bit_data = 1;
}
//如果是在200us< t< 1000us范围内则判断为0
else if((time >=10) && (time < 50))
{
bit_data = 0;
}
//groupNum表示第几组数据
ir_value[ group_num ] < <= 1;
//接收的第1个数为高电平;在第二个for循环中,数据会向右移8次
ir_value[ group_num ] |= bit_data;
//用完时间要重新赋值
time=0;
}
}
//判断数据是否正确,正确则保存数据
infrared_data_true_judgment(ir_value);
}
判断数据是否正确,可以通过将正常数据取反,与反码比较。如果不一致说明数据不对。
typedef struct INFRARED_DATA{
uint8_t AddressCode; //地址码
uint8_t AddressInverseCode; //地址反码
uint8_t CommandCode; //命令码
uint8_t CommandInverseCode; //命令反码
}_INFRARED_DATA_STRUCT_;
_INFRARED_DATA_STRUCT_ InfraredData;
//红外数据是否正确判断
uint8_t infrared_data_true_judgment(uint8_t *value)
{
//判断地址码是否正确
if( value[0] != (uint8_t)(~value[1]) ) return 0;
//判断命令码是否正确
if( value[2] != (uint8_t)(~value[3]) ) return 1;
//串口输出查看接收到的数据
printf("%x %x %x %xrn",value[0],value[1],value[2],value[3]);
//保存正确数据
InfraredData.AddressCode = value[0];
InfraredData.AddressInverseCode = value[1];
InfraredData.CommandCode = value[2];
InfraredData.CommandInverseCode = value[3];
}
//获取红外发送过来的命令
uint8_t get_infrared_command(void)
{
return InfraredData.CommandCode;
}
//清除红外发送过来的数据
void clear_infrared_command(void)
{
InfraredData.CommandCode = 0x00;
}
最后,记得在外部中断服务函数中,调用红外接收函数。
void EXTI_HANDLER(void)
{
if(IR_PORT- >ISR_f.EXTI_PIN) // 中断标志位
{
if(GPIO_ReadPin(IR_PORT, IR_PIN) == GPIO_Pin_RESET) // 如果是低电平
{
//接收一次红外数据
receiving_infrared_data();
}
GPIOA_INTFLAG_CLR(EXTI_BV); // 清除标志位
}
}
移植步骤中的导入.c和.h文件与【CW32模块使用】DHT11温湿度传感器相同,只是将.c和.h文件更改为bsp_ir_receiver.c与bsp_ir_receiver.h。这里不再过多讲述,移植完成后面修改相关代码。
以下为完成红外接收代码:
bsp_ir_receiver.c
/*
* Change Logs:
* Date Author Notes
* 2024-06-24 LCKFB-LP first version
*/
#include "bsp_ir_receiver.h"
#include "stdio.h"
#include "board.h"
typedef struct INFRARED_DATA{
uint8_t AddressCode; //地址码
uint8_t AddressInverseCode; //地址反码
uint8_t CommandCode; //命令码
uint8_t CommandInverseCode; //命令反码
}_INFRARED_DATA_STRUCT_;
_INFRARED_DATA_STRUCT_ InfraredData;
//红外引脚初始化
void infrared_goio_config(void)
{
IR_RCC_GPIO_ENABLE(); // 使能GPIO时钟
GPIO_InitTypeDef GPIO_InitStruct; // GPIO初始化结构体
GPIO_InitStruct.Pins = IR_PIN; // GPIO引脚
GPIO_InitStruct.Mode = GPIO_MODE_INPUT_PULLUP; // 上拉输入
GPIO_InitStruct.Speed = GPIO_SPEED_HIGH; // 速度高
GPIO_InitStruct.IT = GPIO_IT_FALLING; // 下降沿触发中断
GPIO_Init(IR_PORT, &GPIO_InitStruct); // 初始化
// 清除PA0中断标志
GPIOA_INTFLAG_CLR(EXTI_BV);
// 使能NVIC
NVIC_EnableIRQ(EXTI_IRQ);
}
//获取红外低电平时间
//以微秒us作为时间参考
void get_infrared_low_time( uint32_t *low_time )
{
uint32_t time_val = 0;
while( GPIO_ReadPin(IR_PORT, IR_PIN) == 0 )
{
if( time_val >= 500 )
{
*low_time = time_val;
return;
}
delay_us(20);
time_val++;
}
*low_time = time_val;
}
//获取红外高电平时间
//以微秒us作为时间参考
void get_infrared_high_time(uint32_t *high_time)
{
uint32_t time_val = 0;
while( GPIO_ReadPin(IR_PORT, IR_PIN) == 1 )
{
if( time_val >= 250 )
{
*high_time = time_val;
return;
}
delay_us(20);
time_val++;
}
*high_time = time_val;
}
/******************************************************************
* 函 数 名 称:guide_and_repeat_code_judgment
* 函 数 说 明:引导 和 重复 码 判断
* 函 数 形 参:无
* 函 数 返 回:1:不是引导码 2:重复码 0:引导码
* 作 者:LC
* 备 注:以20微秒us作为时间参考
引导码:由一个 9ms 的低电平和一个 4.5ms 的高电平组成
重复码:由一个 9ms 的低电平和一个 2.5ms 的高电平组成
******************************************************************/
uint8_t guide_and_repeat_code_judgment(void)
{
uint32_t out_time=0;
get_infrared_low_time(&out_time);
//time >10ms time < 8ms
if((out_time > 500) || (out_time < 400))
{
return 1;
}
get_infrared_high_time(&out_time);
// x >5ms 或者 x< 2ms
if((out_time > 250) || (out_time < 100))
{
return 1;
}
//如果是重复码 2ms < time < 3ms
if((out_time > 100) && (out_time < 150))
{
return 2;
}
return 0;
}
//红外数据是否正确判断
uint8_t infrared_data_true_judgment(uint8_t *value)
{
//判断地址码是否正确
if( value[0] != (uint8_t)(~value[1]) ) return 0;
//判断命令码是否正确
if( value[2] != (uint8_t)(~value[3]) ) return 1;
printf("%x %x %x %xrn",value[0],value[1],value[2],value[3]);
//保存正确数据
InfraredData.AddressCode = value[0];
InfraredData.AddressInverseCode = value[1];
InfraredData.CommandCode = value[2];
InfraredData.CommandInverseCode = value[3];
}
//接收红外数据
void receiving_infrared_data(void)
{
uint16_t group_num = 0,data_num = 0;
uint32_t time=0;
uint8_t bit_data = 0;
uint8_t ir_value[5] = {0};
uint8_t guide_and_repeat_code = 0;
//等待引导码
guide_and_repeat_code = guide_and_repeat_code_judgment();
//如果不是引导码则结束解析
if( guide_and_repeat_code == 1 )
{
printf("errrn");
return;
}
//共有4组数据
//地址码+地址反码+命令码+命令反码
for(group_num = 0; group_num < 4; group_num++ )
{
//接收一组8位的数据
for( data_num = 0; data_num < 8; data_num++ )
{
//接收低电平
get_infrared_low_time(&time);
//如果不在0.56ms内的低电平,数据错误
if((time > 60) || (time < 20))
{
return ;
}
time = 0;
//接收高电平
get_infrared_high_time(&time);
//如果是在1200us=60) && (time < 100))
{
bit_data = 1;
}
//如果是在200us=10) && (time < 50))
{
bit_data = 0;
}
//groupNum表示第几组数据
ir_value[ group_num ] <<= 1;
//接收的第1个数为高电平;在第二个for循环中,数据会向右移8次
ir_value[ group_num ] |= bit_data;
//用完时间要重新赋值
time=0;
}
}
//判断数据是否正确,正确则保存数据
infrared_data_true_judgment(ir_value);
}
//获取红外发送过来的命令
uint8_t get_infrared_command(void)
{
return InfraredData.CommandCode;
}
//清除红外发送过来的数据
void clear_infrared_command(void)
{
InfraredData.CommandCode = 0x00;
}
void EXTI_HANDLER(void)
{
if(IR_PORT- >ISR_f.EXTI_PIN) // 中断标志位
{
if(GPIO_ReadPin(IR_PORT, IR_PIN) == GPIO_Pin_RESET) // 如果是低电平
{
//接收一次红外数据
receiving_infrared_data();
}
GPIOA_INTFLAG_CLR(EXTI_BV); // 清除标志位
}
}
bsp_ir_receiver.h
/*
* Change Logs:
* Date Author Notes
* 2024-06-24 LCKFB-LP first version
*/
#ifndef _BSP_IR_RECEIVER_H__
#define _BSP_IR_RECEIVER_H__
#include "board.h"
#define IR_RCC_GPIO_ENABLE() __RCC_GPIOA_CLK_ENABLE()
#define IR_PORT CW_GPIOA
#define IR_PIN GPIO_PIN_2
#define EXTI_PIN PIN2
#define EXTI_BV bv2
#define EXTI_IRQ GPIOA_IRQn
#define EXTI_HANDLER GPIOA_IRQHandler
void infrared_goio_config(void);
uint8_t get_infrared_command(void);
void clear_infrared_command(void);
#endif
四、移植验证
在自己工程中的main主函数中,编写如下。
/*
* Change Logs:
* Date Author Notes
* 2024-06-24 LCKFB-LP first version
*/
#include "board.h"
#include "stdio.h"
#include "bsp_uart.h"
#include "bsp_ir_receiver.h"
int32_t main(void)
{
board_init(); // 开发板初始化
uart1_init(115200); // 串口1波特率115200
//红外接收初始化
infrared_goio_config();
printf("Start!!!rn");
while(1)
{
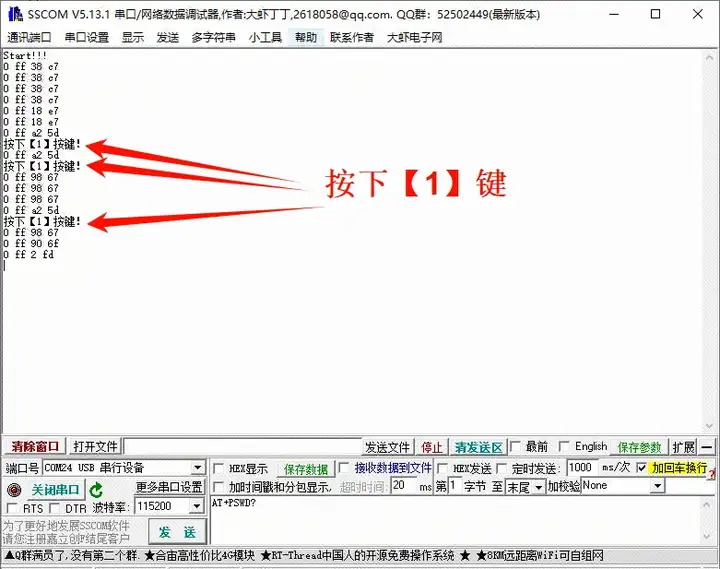
//如果按下遥控的【1】键
if( get_infrared_command() == 0xA2 )
{
clear_infrared_command();
printf("按下【1】按键! rn");
}
}
}
移植现象:
模块移植成功案例代码:
链接:https://pan.baidu.com/s/1Yln6MD82bPkgS2x-YMnfCQ?pwd=LCKF
提取码:LCKF
审核编辑 黄宇
-
红外接收模块:开启智能家电控制新时代2026-07-12 132
-
Vishay TSOP752..W与TSOP754..W红外接收模块:设计指南与技术解析2026-07-10 99
-
Vishay红外接收器模块:优化短脉冲遥控系统设计2026-05-12 592
-
CW32模块使用 红外解码编码模块2025-01-23 1875
-
红外接收头的主要功能_红外接收头的应用场景有哪些2024-10-21 4478
-
【项目展示】基于CW32的遥控循迹小车2024-05-31 2884
-
基于CW32的遥控循迹小车2023-11-17 2855
-
基于CW32的RC522刷卡模块的应用2023-11-02 2962
-
【CW32移植Free-RTOS】CW32开发者扶持计划2023-04-18 7782
-
#电子元器件 红外接收模块Mr_haohao 2022-07-16
-
【更好用的单片机】Stduino学习(三十一)红外接收模块2021-12-17 846
-
红外接收模块+Stduino Nano&UNO2021-08-06 1795
-
dfrobot数字红外接收模块简介2019-12-13 2979
-
51单片机对红外发射和红外接收模块电路的设计2018-12-10 27511
全部0条评论

快来发表一下你的评论吧 !
