

地磁传感器对车辆存在性检测原理
传感器
描述
地磁传感器介绍
地磁传感器可用于检测车辆的存在和车型识别。数据采集系统在交通监控系统中起着非常重要的作用,地磁传感器是数据采集系统的关键部分,传感器的性能对数据采集系统的准确性起决定作用。
“地磁传感器”的工作原理是当驾驶员将车辆停在车位上,“地磁传感器”将自动感应车辆的停车时间,将时间传送到中继站进行计费,市民直接用银行卡在POS机上缴费。同时利用该设备摄像功能,不交费的车辆进行拍照,并将这些车辆信息录入有关网站,对逃费车辆采取一定措施。
地磁传感技术及其优点
地球的磁场在几公里之内基本上是恒定的,但大型的铁磁性物体会对地球磁场产生巨大的扰动,地磁传感器可以分辨出地球磁场6000分之1的变化,而当车辆通过时对地磁的影响将达到地磁强度的几分之一,因此利用地磁传感器来探测车辆,具有极高的灵敏度,地磁传感器就是通过探测车辆通过时对地球磁场产生的扰动来探测车辆的,国外的应用非常广泛。
1、安装、维修方便,不必封闭车道、对路面破坏小,当在检测点吊架或侧面安装时不用破坏路面,维修时只需检查地磁传感器即可;检测点不易遭到破坏,不受路面移动影响;
2、地磁传感器是利用地球磁场在铁磁物体通过时的变化来检测,所以它不受气候的影响;
3、通过对灵敏度的设置可以识别铁磁性物体的大小,可以大致判断出车辆的类型;
4、对非铁磁性物体没有反应,因此可以有效地减少误检。
地磁传感器可用于检测车辆的存在和车型识别。利用车辆通过道路时对地球磁场的影响来完成车辆检测的传感器与目前常用的地磁线圈(又称地感线圈)检测器相比,具有安装尺寸小、灵敏度高、施工量小、使用寿命长,对路面的破坏小(有线安装只需要在路面开一条5毫米宽的缝,无线安装只需要在路面打一个直径55 毫米深150毫米的洞,当在检测点吊架或侧面安装时不用破坏路面)等优点,在智能交通系统的信息采集中必将起到非常重要的作用。
地磁传感器对车辆存在性检测原理
地球磁场的强度在0.5 至0.6 高斯,地球磁场在很广阔的区域内(大约几公里)其强度是一定的。当一个铁磁性物体,如汽车,置身于磁场中,它会使磁场扰动,如图1,此时,放置于其附件的地磁传感能测量出地磁场强度的变化,从而对车辆的存在性进行判断。
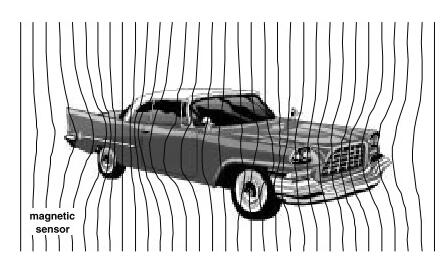
图1 汽车对地磁场的扰动
对于车辆的存在和方向检测,不需要象对车辆进行分类时那么详细的信息,所以只需将磁传感器放置在路边,沿着被检测的车道即可,而不需要在车道上挖坑埋入磁传感器。三轴磁传感器放在距地面1英尺高的位置,X、Y、Z轴方向定义如图2所示。
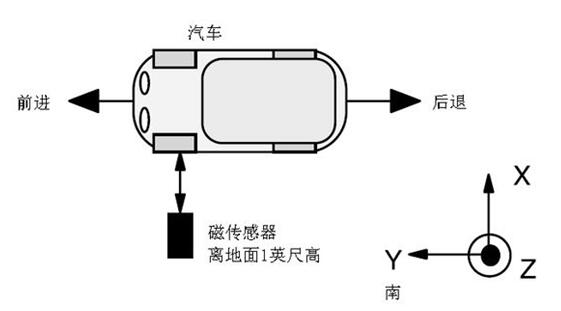
图2 车辆与磁传感器初始化设置
沿着向上方向的Z轴磁场可用来检测车辆的存在,如图3,轿车经过时Z轴的曲线,该曲线的特点是: 当传感器与车辆平行时出现峰值。当在车辆距传感器1英尺的情形下,对该曲线进行平滑处理后,可用来指示车辆的存在。通过建立合适的阀值,可以滤掉旁边车道的车辆或远距离车辆带来的干扰信号。
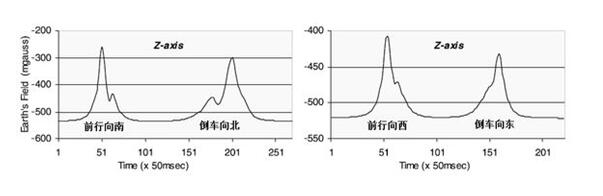
图3 轿车经过时Z轴磁传感器的曲线图
除了上述沿着向上方向的Z轴检测到手磁场变化可用来检测车辆的存在,检测车辆存在的另一方法是观察磁场变化的大小,也就是计算出整个地磁场在汽车经过时的磁场强度变化情况,从面判断出有无汽车经过: 磁场的大小=(X^2+Y^2+Z^2)^1/2
图4显示了磁传感器距车辆1 英尺、5 英尺、10 英尺和21 英尺时,一辆轿车通过所产生的曲线。在不同距离下,Z轴的曲线形状很相似,但是信号强度却大不相同。从1英尺到5英尺,信号强度衰减得非常快。距离越远,数值快速衰减。当传感器只检测单一车道车辆,而忽略其他车道车辆的存在时,这种特点非常有用。
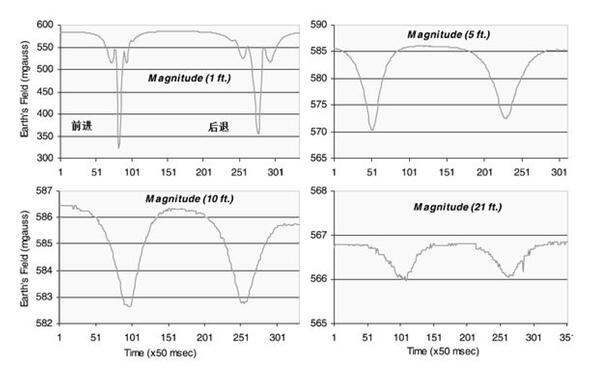
图4 轿车经过时磁场强度的变化曲线
磁传感器在1 至4 英尺的路边检测距离范围内可以工作得很好。通过观察磁场的变化,可以确定通过车辆的存在。这种检测方法的好处是不用将传感器及相关电路埋在地底,磁传感器也可以安装在铝制外壳中。
地磁传感器应用于停车场车辆检测
车辆的分类
根据地磁传感器对于车辆检测的原理,一般通过地磁的扰动和变化提供的关于车辆的详细地磁特征,就可以判断分析出不同类型的车辆,即进行车辆的分类工作。对车辆进行测试的实验装置为,三轴AMR地磁传感器放置在距离地面30cm高的位置,X轴指向西,Y轴指向南,Z轴是垂直向上的。在检测车辆分类的实验中,将三轴AMR地磁传感器放置在车辆旁边,这样就可以提取出车辆经过时引起的地磁扰动及其详细的地磁特征信号。当车辆通过这10米的距离时,就可以测试出地磁信号输出中两个峰值之间的时间,并因此可以计算出相应的车速(距离10米与峰值的时间差之比)。从而就为车辆分类又提供了一个重要的交通参数,同时也为车辆是否超速和电子眼的工作提供了重要的依据。在此基础上,结合输出曲线中的畸变扭曲部分及其具体程度,就能够再进一步计算出车辆的长度,这样就会更加有利于对车辆分类的进一步研究。
车辆的存在
检测车辆存在的问题时,只需要有一个方向向上的单轴传感器就能够满足要求。此时输出的地磁曲线只要经过简单的分析,就能够检验车辆是否存在。同时,为了避免或过滤相邻车道的地球磁场干扰,可以适当地在地磁信号输出曲线上进行一些阀值的设置来进行一定程度的数据转换,这样就能够有效而可靠地进行地磁的抗干扰设计。另外,进行车辆检测的存在性也有其它办法,比如可以通过计算当前周围磁场变化的方法。当前周围磁场变化=(X2+Y2+Z2)1/2。
此时计算出来的数值变化就表明了车辆对地球磁场整体的扰动程度,各个地磁输出曲线在总体的走势上基本是大同小异,但是在信号的强度,即正负峰值的变化确实非常大,可以看出这种衰减的变化是非常快的。为此,如果地磁传感器不需要考虑相邻车道的情况,而仅仅是检测当前车道上的车辆时,那么这种衰减的变化就会真正地充分地发挥作用和优势,而且也是特别有效的。在实际的交通应用中,AMR地磁传感器在一定的道路范围内可以有着非常好的检测准确度。同时,这也能够很好地检测车辆的存在和方向情况,并且在实际使用中也不需要进行切割道路等工作,这就使得整个检测的准备工作和过程是特别地有效和简便。
车型判别
系统可识别的车型分为4种,分别定义为:小型车,0;中型车,1;大型车,2;特大型车,3。其分类标准为:4m以下为小型车,4~7m为中型车,7~11m为大型车,11m以上为特型车。车型的判别是通过单条通道的数据来判断的,具体的思路是:波形长度的总点数是已知的,且采样频率是已知的,且车辆的速度如前所示,已经可以算出来。则可根据式来计算出车长,并可根据车长来识别车型。Lcar=Vcar×[N×(1/f采样频率)]式中:Vcar为车辆的速度;N为一个单通道的波形所包含的时间序列点数;f采样频率为地磁传感器的采样频率。
结束语
地磁传感器相比于地磁线圈有很大优点。线圈会跟随路面变形(沉降、裂缝、搓移等),因此其使用效果及寿命受路面质量的影响甚大,一般寿命仅2年。另外环境的变化和环形线圈的正常老化对检测器的工作性能有较大的影响,可使检测器材谐振回路失谐而不能判断车辆存在产生的频率变化。地磁传感器受力面积小,抗外界干扰比地磁线圈小,而且输出的是数字信号,不需要模拟信号处理,电路简单,抗干扰性强。安装、维修方便,不必封闭车道、对路面破坏小,维修时只需检查地磁传感器即可;检测点不易遭到破坏,不受路面移动影响。
停车场车辆检测系统是目前交通运输领域的前沿研究课题。发达国家提出并执行了一系列研究计划,其核心是针对日益严重的交通需求和环境保护压力,采用通信技术、计算机技术、控制技术、信息处理技术等对传统交通运输系统进行深入改造。在我国,智能交通的研究处于起步阶段。伴随着经济的发展,城市化进程的加快,大城市交通拥堵以及能源、环境问题也变得相当严重。智能交通系统研究必将为我国社会经济的飞速发展提供强有力的支撑。
- 相关推荐
- 热点推荐
- 地磁传感器
-
何谓地磁传感器?2024-09-11 2812
-
地磁传感器是什么2023-06-30 5414
-
地磁传感器与陀螺仪区别是什么2021-01-20 4865
-
无线地磁传感器更适合路边停车系统2020-09-09 5262
-
路边停车系统无线地磁车辆传感器2020-04-21 6265
-
地磁传感器怎么安装2019-11-18 9941
-
什么是地磁传感器?2019-05-20 5995
-
什么是地磁传感器2019-03-26 9440
-
车辆检测领域性能最好的地磁传感器(MI传感器)"BM1422AGMV"2018-11-12 2454
-
最好的交通数据采集技术之一:地磁传感器检测技术2018-06-29 10954
-
地磁传感器工作原理_地磁传感器应用_地磁传感器的作用2018-03-08 43892
-
地磁车辆检测器特点及工作原理2017-11-13 26688
-
---请教自学习算法相关问题for车辆检测器(地磁传感)---2012-05-24 2458
全部0条评论

快来发表一下你的评论吧 !
