

自动驾驶视觉系统的激光雷达全球代表厂商汇总
汽车电子
描述
在关乎自动驾驶视觉系统的所有传感器当中,激光雷达可谓是最不可或缺的一个。受全球自动驾驶战场持续火热的影响,这条赛道现在也开始变得拥挤起来,前有Velodyne以高线束LiDar研发能力和大规模量产实力稳拿“一哥”地位,后有Quanergy、LeddarTech以及速腾聚创等众多行业新秀们“群雄逐鹿”,在加上通用、百度、福特以及安波福等自动驾驶巨头们持续的煽风点火,激光雷达的“江湖”热闹非凡。
同时,随着新旧技术之间不断的摩擦碰撞,如今的激光雷达“十八罗汉”也开始组建不同的技术阵营,以此撬动整个自动驾驶“江湖”。其中,以Velodyne代表的机械旋转扫描、速腾聚创代表的MEMS、Quanergy代表的相控阵列以及LeddarTech所代表的3D Flash已先行组建起激光雷达战场四大主流阵营。除此之外,诸如Strobe的FM线性调频、Oryx Vision的COR相干光以及光珀智能的固态面阵这类的新型技术也开始崭露头角,成为打破传统激光雷达技术的一股创新力量。

全球主流激光雷达代表厂商
1、机械式旋转扫描阵营
在所有激光雷达种类中,机械旋转扫描式LiDar可谓是开山鼻祖,并在“江湖一哥”Velodyne的引领下杀出了第一条通往自动驾驶战场的血路。除Velodyne以外,Quanergy、Ouster、Ibeo以及国内的禾赛科技也在不断耕耘机械旋转扫描式激光雷达市场。而随着该技术的不断精进,越来越高线束(比如128线)的LiDar产品也经由Velodyne之手正式加入到战场,Velodyne也一箭双雕,进一步巩固自己行业主导地位的同时,也令机械旋转扫描式LiDar在新型固态激光雷达技术大规模冲击之下仍能保持主动性。
机械旋转扫描式激光雷达内部结构
不过,就长远发展及商业化而言,由于该类型产品采用诸多机械零部件,设计原理和结构上已趋于固定,价格高昂且平均的失效时间仅1000-3000小时,难以达到整车厂们的最低要求的13000小时。因此,多方应用瓶颈并存的态势下,机械旋转扫描式激光雷达的市场并不被车厂以及技术研发商们所看好,这也使得之前在该领域持续深耕的Quanergy和Ibeo两家公司开始转投混合固态和纯固态激光雷达产品路线。
2、MEMS阵营
与传统机械式多线激光雷达相比,MEMS式利用微振镜方案进行区域扫描,可极大减少发射器和接收器的使用。这样的设计可让产品的零部件数量急剧减少,相应的零部件成本也可随之大幅下降,同时可以实现一次成型,大大降低LiDar的开发成本以及提升产能。
此外,由于可以做成固态激光雷达,更容易实现规模化和商业化,近年来受到国际上越来越多厂商的热捧。而目前,研发MEMS激光雷达的主要有美国的Luminar、Innovusion、以色列的Innoviz以及国内的速腾聚创等厂商。尽管美国公司Cepton的产品也有一部分MEMS的身影,但该公司的激光雷达更主要的还是采用Micro-motion技术来实现,并不是纯粹的MEMS LiDar技术。
3、相控阵列阵营
相控阵技术最初源于军事雷达,此类激光雷达搭载的一排发射器,可以通过调整信号的相对相位来改变激光束的发射方向,整个过程中没有机械动作,仅靠电子元器件本身来实现扫描。但整体上来看,相控阵的技术门槛是三大固态激光雷达方案中难度最高的一种,开发成本也很高,目前市面上真正能够实现突破的企业较少,各厂商也大都处于技术探索阶段。
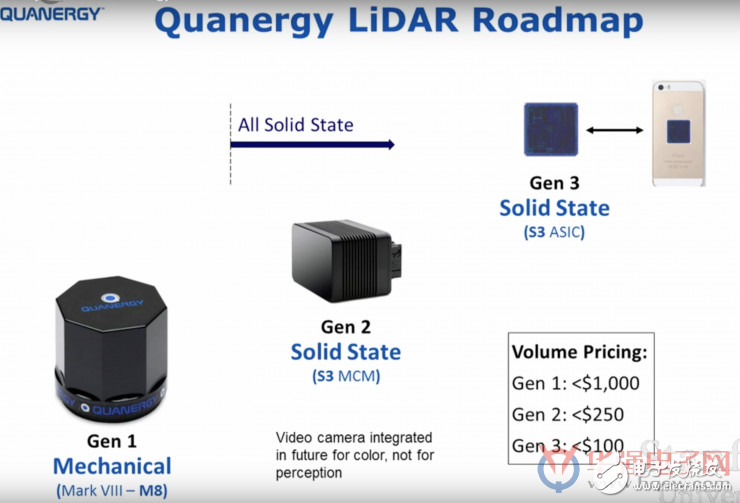
在这条路线上,Quanergy是其中的代表厂商,除此之外还有国内的镭神智能以及速腾聚创。事实上,目前业界也没有一个明确的产品开发路线,各家有各家的妙招,比如该领域的领军者Quanergy主要通过软件来控制激光束的产生以及扫描进程,只需要通过算法调节视野内不同区域的点云密度,就可以控制相控阵雷达的精度。同MEMS类似,随着激光雷达向固态化方向进一步深化,近年来相控阵的研发路线也开始在激光雷达领域快速兴起,成为固态激光雷达阵营中的一大中坚力量。
4、3D Flash阵营
相比MEMS以及相控阵两种固态激光雷达,3D Flash激光雷达运行起来则更像摄像头,是一种非扫描式激光雷达产品,其激光束会直接向各个方向漫射,由类似于摄像头成像的CMOS传感器采集反射回来的激光束。它可以快速记录整个场景,难点也在于接收信号的传感器,所以目前在性能上相比前三种还处于劣势。目前,Flash阵营激光雷达产品的代表公司主要有LeddarTech、TetraVue以及国内的北醒光子和北科天绘等厂商。
5、其他创新型阵营
线性调频FM式
自从Strobe被汽车巨头通用收购之后,FM LiDAR就开始受到业界的广泛关注。这种激光雷达主要发射线性调频激光,而且只需测量返回激光的相位和频率,系统就能直接得到车辆周边物体的距离和速度等数据。这大大降低了车辆“大脑”的计算负荷,让它能更快的作出决定。
除此之外,FM LiDAR更多的优势在于更强的抗干扰能力,无需配备敏感的光电探测器,仅采用“回音壁模式”的光学共振器就能减小激光的线宽并带来更加精确的信号,而来自谐振器的光会返回激光源,但线宽会变窄,然后只需调整谐振器的光学特性,就能得到高度线性的调频激光,满足自动驾驶汽车的需要。Cruise Automation的CEO Kyle Vogt也说过,Strobe的线性调频式激光雷达的体积可以达到25美分大小,且能够将激光雷达的成本减少99%,但真实性还有待考证。
COR相干光式
COR相干光式产品出自以色列公司Oryx Vision,该雷达系统采用了该公司称为“纳米天线”的技术来接收电磁波,从而能获得更多的额外信息。该技术的优势在于增大了自动驾驶汽车对外界的感知范围和灵敏度,使其对周围的环境以及正在发生的事情有更清晰的了解。Oryx天线能够接收波长为10微米的电磁波,因此能有效穿透烟雾,而且不像激光雷达那样会受到强光影响。
此外,Oryx公司的COR相干光式LiDar中没有任何可动部件,采用纳米天线技术替代了光电探测器,在对周围环境的高分辨率扫描中来获取光点的距离和速度信息。而且,其激光器采用的是长波太赫兹红外激光,这种红外光人眼不可见,因此COR相干光LiDar系统可以做到比普通激光雷达更高的功率。
固态面阵式
固态面阵式的代表厂商是国内的光珀智能,该技术路线是将脉冲激光通过匀光装置,按照设计视角均匀照射在探测方向。而反向散射的脉冲激光通过特殊的镜头,在面阵传感器上成像,传感器上的每个像素都可以通过对激光回波的检测,系统可以通过计算飞行时间发获取对应点的距离。
而在设计上,这种方案的结构相对简单,能够进行自动化大规模生产。性能方面,固态面阵方案能够达到较高的空间分辨率,面阵激光雷达可以将垂直分辨率相比64线激光雷达提升一个数量级,不仅能够确定障碍物的相对位置,还能识别其属性,规避了多个传统机械式激光雷达的应用瓶颈。
-
FPGA在自动驾驶领域有哪些应用?2024-07-29 0
-
自动驾驶真的会来吗?2016-07-21 0
-
浅析自动驾驶发展趋势,激光雷达是未来?2017-09-06 0
-
激光雷达是自动驾驶不可或缺的传感器2017-09-08 0
-
无人驾驶与自动驾驶的差别性2017-09-28 0
-
激光雷达-无人驾驶汽车的必争之地2017-10-20 0
-
即插即用的自动驾驶LiDAR感知算法盒子 RS-Box2017-12-15 0
-
固态设计激光雷达2018-01-25 0
-
从光电技术角度解析自动驾驶激光雷达2018-09-10 0
-
自动驾驶激光雷达新型探测器:近红外MPPC2018-09-10 0
-
视觉系统对自动驾驶的重要性2021-01-25 0
-
激光雷达成为自动驾驶门槛,陶瓷基板岂能袖手旁观2021-03-18 0
-
谈一谈自动驾驶的激光雷达2021-06-17 0
-
自动驾驶系统设计及应用的相关资料分享2021-08-30 0
-
激光雷达如何助力自动驾驶?2020-08-17 2649
全部0条评论

快来发表一下你的评论吧 !
