

零知开源——MPU6050六轴传感器模块实践教程,轻松实现运动检测!
电子说
描述
零知增强板I2C通信
本教程将指导您如何使用零知增强板与MPU6050六轴传感器模块进行交互。MPU6050是一款含有三轴加速度计和三轴陀螺仪的传感器,能够测量设备的倾斜情况和旋转运动。
通过本教程,您将学习如何读取并处理这些数据,为您的项目添加运动检测和姿态控制功能。
一、硬件连接
在开始编程之前,首先需要正确连接MPU6050模块到零知增强板。
1.所需材料:
零知增强板
MPU6050六轴传感器模块
跳线若干
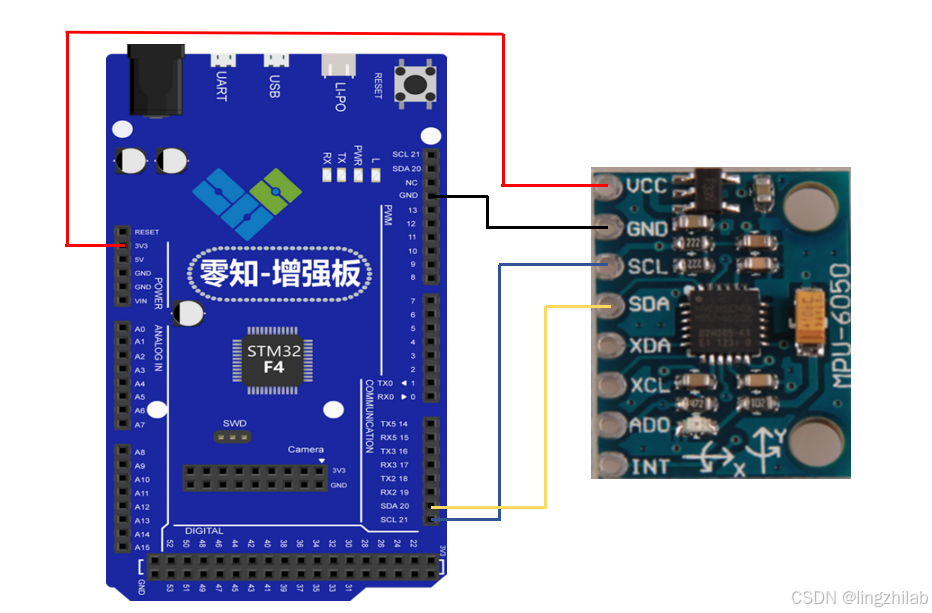
2.硬件连接示意图:
MPU6050模块的SCL和SDA分别连接到零知增强板的21、20号引脚
| 零知增强版 | MPU6050 |
| 3.3V | VCC |
| GND | GND |
| 21/SCL | SCL |
| 20/SDA | SDA |
完成以上步骤后,硬件连接就完成了。
二、代码实现
接下来,我们将编写代码来读取MPU6050的数据。
准备工作:
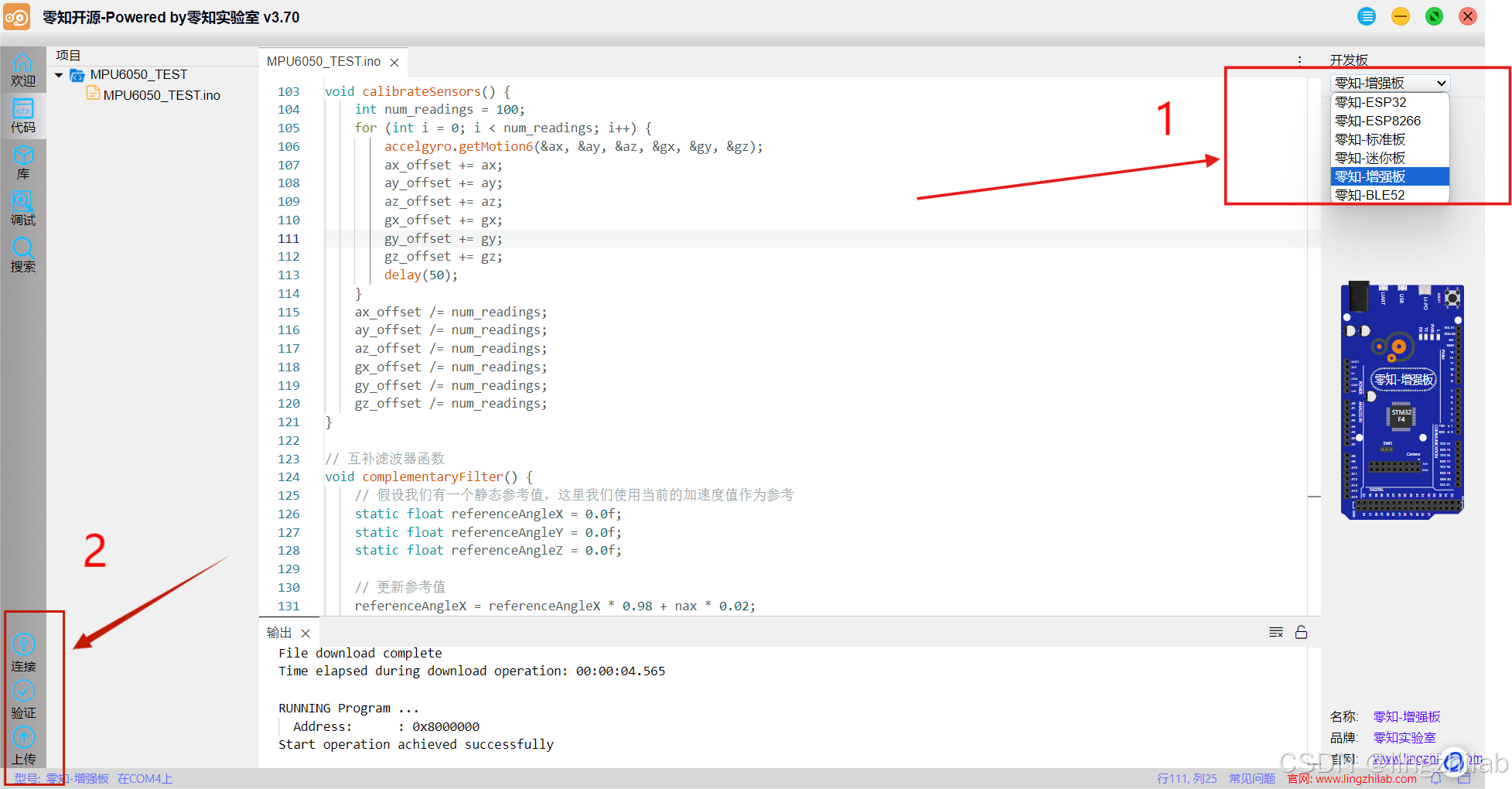
1.打开零知开源平台,选择零知增强板开发板
2.选择电脑连接的串口,验证代码并上传
完整源代码:
/* I2C interface MPU6050 demo
* powered by www.lingzhilab.com
*/
#include "MPU6050.h"
// 默认I2C地址为 0x68
// AD0 low = 0x68
// AD0 high = 0x69
MPU6050 accelgyro;
int16_t ax, ay, az;//三轴加速度值
int16_t gx, gy, gz;//三轴陀螺仪值
float nax,nay,naz;
float ngx,ngy,ngz;//转换后的实际值
#define LED_PIN LED_BUILTIN
bool blinkState = false;
void setup() {
Serial.begin(9600);
// MPU6050初始化设置
Serial.println("Initializing I2C devices...");
accelgyro.initialize();
// verify connection
Serial.println("Testing device connections...");
if(accelgyro.testConnection()){
Serial.println("MPU6050 connection successful");
}else{
Serial.println("MPU6050 connection failed");
}
//使用LED进行指示
pinMode(LED_PIN, OUTPUT);
// accelgyro.setFullScaleAccelRange(MPU6050_ACCEL_FS_16);//加速度参数
// accelgyro.setFullScaleGyroRange(MPU6050_GYRO_FS_500);//陀螺仪
}
void loop() {
// 获取原始的数值:三轴加速度值和三轴陀螺仪数值
accelgyro.getMotion6(&ax, &ay, &az, &gx, &gy, &gz);
// 分别获取
//accelgyro.getAcceleration(&ax, &ay, &az);
//accelgyro.getRotation(&gx, &gy, &gz);
// 显示打印
Serial.print(" acc:t");
Serial.print(ax); Serial.print("t");
Serial.print(ay); Serial.print("t");
Serial.print(az); Serial.print("t");
Serial.print("t gyro:t");
Serial.print(gx); Serial.print("t");
Serial.print(gy); Serial.print("t");
Serial.println(gz);
//实际数值转换
accelgyro.readNormalizeAccel(&nax,&nay,&naz);
accelgyro.readNormalizeGyro(&ngx,&ngy,&ngz);
Serial.print("Normalize acc:t");
Serial.print(nax); Serial.print("t");
Serial.print(nay); Serial.print("t");
Serial.print(naz); Serial.print("t");
Serial.print("t Normalize gyro:t");
Serial.print(ngx); Serial.print("t");
Serial.print(ngy); Serial.print("t");
Serial.println(ngz);
// blink LED to indicate activity
blinkState = !blinkState;
digitalWrite(LED_PIN, blinkState);
delay(300);
}
三、实验结果
将代码验证上传到零知增强板,打开串口监视器,设置波特率为9600。观察测量到的加速计和陀螺仪输出数据
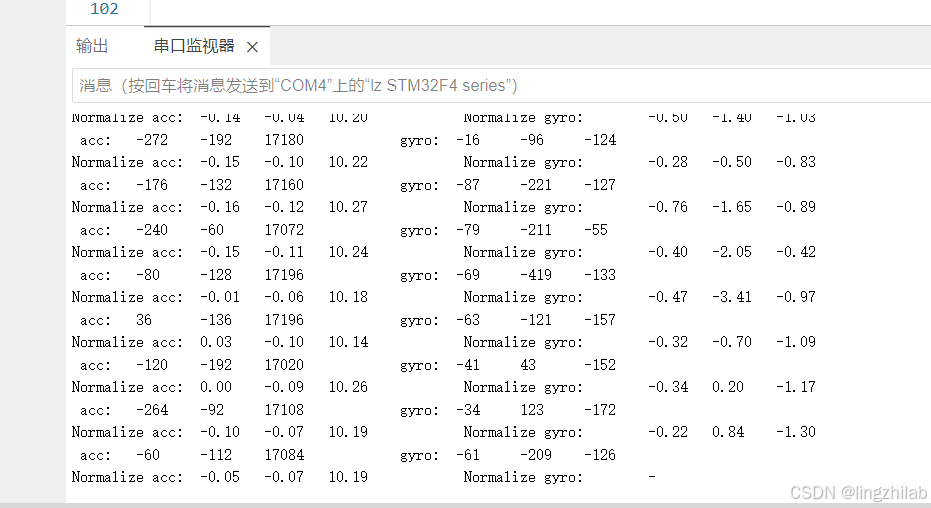
结果分析:
上传代码并打开串口监视器后,将看到加速度计和陀螺仪的原始数据以及归一化后的数据。
原始数据:
原始数据显示了MPU6050直接读取的数值,这些数值是传感器内部ADC转换后的数字量。
归一化数据:
归一化数据是将原始数据转换为实际的物理量(加速度单位为g,陀螺仪单位为度/秒)。这些数据更直观,便于进行后续的处理和分析。
通过本教程,您已经学会了如何使用零知增强板和MPU6050模块来读取运动数据。这些数据可以用于各种应用,如姿态控制、平衡机器人、运动跟踪等。您可以根据项目需求进一步处理和分析这些数据。
完整工程参考:
通过网盘分享的文件:MPU6050.rar
链接: https://pan.baidu.com/s/1nHM_Uh29d-DEb4zKxlAoGQ 提取码: kyrc
审核编辑 黄宇
-
零知开源——MPU6050六轴传感器模块实践教程,轻松实现运动检测!2025-02-20 2915
-
使用MPU6050开源库将板子上的IMU模块驱动起来2023-03-28 1821
-
MPU6050六轴传感器的相关资料推荐2022-02-10 1100
-
MPU6050六轴传感器2021-12-06 1347
-
MPU6050六轴陀螺仪传感器实验的资料合集免费下载2020-06-02 1887
-
MPU6050六轴传感器实验的程序和工程文件免费下载2019-09-20 1633
-
mpu6050六轴传感器模块驱动程序源代码分享2017-12-11 39443
-
BH-MPU6050 六轴传感器用户手册2017-11-28 3243
-
ATK-MPU6050六轴传感器模块使用说明(Mini V3)_2016-03-21 3289
全部0条评论

快来发表一下你的评论吧 !
