

机器人领域的变革和创新改变了工厂和仓库,生活也悄然发生着变化
电子说
描述
导 读
多年以来,机器人领域的变革和创新改变了工厂和仓库,它们在受控环境中表现良好,通常不会进入大众的视野。
哈佛大学的科学家们,正在推动机器进入新的时代,这群研究人员新的目标是普罗大众,他们认为科技所有的改变,意在为更多领域、更多普通人带来变革性影响。
“科幻小说已经描绘了50年,怎么这些机器人还没出现在人们身边?”工程和应用科学教授RobertWood说。
你的想象中,现实世界的机器人,是否是这样的场景?
你在网上购买的商品,会由无人机负责配送;你购买的汽车,会自动开到目的地;你不愿意干的家务,会有一个机器人帮你收拾打理;更多的场景里,机器人还能帮助搜救灾民和种植粮食。
所有这梦幻般的一切,已经在悄悄上演。
下面这些你不曾想象过的机器人,都来自哈佛的研究团队。一篇很有想象力的文章分享给热爱新事物的你们,Enjoy it。
原作:Alvin Powell唐旭 夏乙 编译整理量子位 出品 | 公众号 QbitAI
下一代机器人将广泛进入现实世界,穿过森林和田野,到达城镇和家庭。你在网上购买的商品,会由无人机负责配送;你购买的汽车,会自动开到目的地;你不愿意干的家务,会有一个机器人帮你收拾打理。
当然不止这些。机器人还能帮助搜救灾民,帮助种植粮食,会在军中服役,会在医院至于你的心灵,成为你身体的一部分。
所有这梦幻般的一切,已经在悄悄上演。
下面这些你不曾想象过的机器人,都来自哈佛的研究团队。
动力
哈佛大学最近在机器人方面的工作让一项在历史上沉寂多时的研究重焕生机。George Whitesides教授称,他在软体机器人研究方面取得的突破,与哈佛大学在软物质物理学方面的力量,以及同事们在微流体上的研究密切相关。
一部分在软体机器人方面的早期工作,是在上世纪90年代由日本科学家完成的。而最近,由Whitesides、Wood和Conor Walsh等人做出的创新推动力整体领域的进步,使得机器人有望实现从设计和特性上对运动进行控制,而不是从齿轮和杠杆上。
“我们用材料的某些特性来代替控制装置。”Whitesides拿着一种海星形状的橡胶夹手说,当有空气进入手臂,夹手就会自动夹紧。“这些东西有一种从顶端卷曲的倾向——而这是可控的。原本,若是没有硬体机器人身上的那些部件,要实现这种效果几乎是不可能的。”
由此诞生的机器人甚至可以被一辆车碾过而在功能上毫发无伤。这也促成了在全新的制造技术方面的一些研究,比如威斯生物工程研究所教授Jennifer Lewis实验室在3D打印方面的工作。类似的成果,还有同《国家地理》杂志合作的,能在水下收集脆弱珊瑚的抓取机器人;以及商业机器人公司Soft Robotics开发的,能在农场、仓库、装配线等场景下抓取各种产品的灵活机器手。
“(将这些技术)转向市场的过程很有趣。”Whitesides说。“最初成型的应用针对的那些领域,我一开始并不知道还存在着问题。结果它们商业化的速度并我所参与过的所有项目都快。”
补充说一下这个气动、完全不受限制的移动式软体机器人。
这个机器人使用了由有机弹性体、聚芳酰胺织物和空心玻璃微珠组成的复合材料制造,配有一个微型空气压缩机、电池、阀门和控制器。
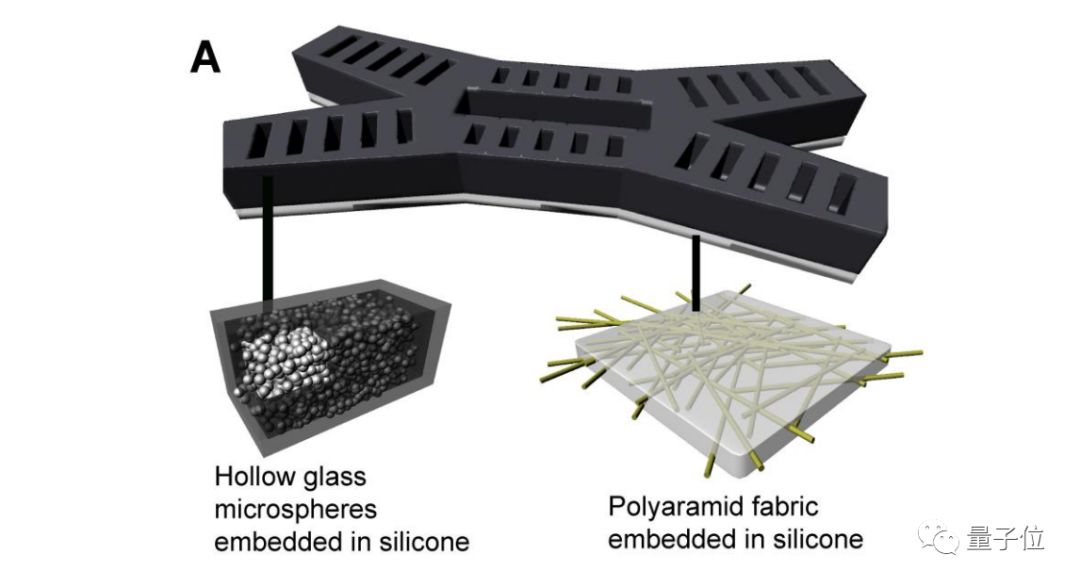
这种硅胶机器人不透水、有良好的酸碱稳定性,抗冲击/压迫能力强,在积雪、积水、火烧、车碾等恶劣环境下,这个机器人都能一往无前、不可阻挡。
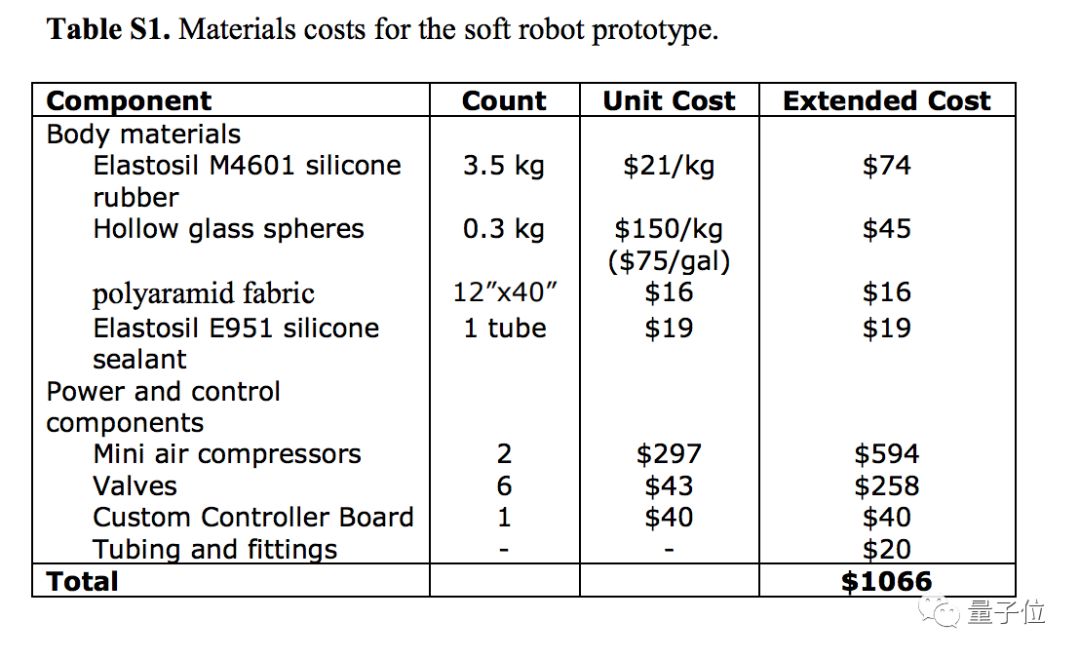
而且价格低廉,成本如下图所示。
当然这种机器人也不是完美的。例如对大孔洞敏感、容易被尖锐物体撕裂、控制精度和运动能力不足、速度缓慢。想提速,只能搭配提及更大的空气压缩机。
更多细节,在这个页面:
https://dash.harvard.edu/bitstream/handle/1/16920697/21340991.pdf
哈佛大学技术发展办公室战略合作伙伴关系执行主任Sam Liss表示,在对于哈佛机器人研究进展的评估方面,类似Soft Robotics这样的公司提供了一种相对直接的标准。
“创业公司出现的速度非常惊人。”他说,“在过去几年内,我们就已经看到了Soft Robotics、 RightHand Robotics和Root Robotics等等——对于哈佛而言,这是非常重大的转变。它不仅强调了科研的重要意义,还代表着我们的同事在将技术产品化的过程中所付出的努力。”
哈佛大学在机器人研究方面的发展,主要由保尔森工程与应用科学学院和威斯生物工程研究所驱动。研究者称,在机器人制造工具和设备领域更深层次的投入,对于教师、学生和研究院们都产生了重大影响。
“特别是对于我从事的工作来说,让学生和博士后们能够用上这些工具非常重要。”Wood说,“工程与应用科学学院和生物工程研究所在一些领域的投入上做得非常不错。这么看其实我们什么都不缺。”
团队协作
哈佛有一个由不到十二位机器人专家组成的核心部门,部门内部的科学家会定期合作,甚至彼此依赖各自的专长。研究的重点包括能在陆地、海洋和空中与人类紧密合作的机器人——通常是用于医疗。
“我们制造人们从未想象过的那种机器人。”计算机科学教授Radhika Nagpal说,“像是会飞的小蜜蜂,甚至是你能穿在身上的机器人。从某种程度上说,我们创造的机器人是狂野的,它们更像是动物,而不是四轮汽车。”
其中一个例子是RoboBee,由Wood开发,Nagpal的软件负责控制。这种虫子般大小的、会飞的机器人在调查勘探方面有非常大的潜力:它能够从自然灾害、作物病害甚至战争地区中收集图像和数据,小到不包含任何机械杠杆、齿轮。设计制造这种机器人需要的专业技术已经来到了机器人设计领域之外。
“对于RoboBee而言,没有任何现成的部件。”Wood说,“我们必须从头开始:全新的制造方法、全新的动作、感知、计算架构、全新的能源存储;对于Radhika而言,则是控制行为的全新算法。我们工作的平台都需要从头搭建。”
Wood还表示,RoboBee身上的传感器和执行器可能会在某些生物医学装置和微创手术上起到作用,因为在这类工作中,尺寸是一个非常重要的因素。
“我们谈论的是从RoboBee上发展出的所有技术,将它们同软体机器人结合来创造全新的工具,这些工具可以用于内窥镜检查这类复杂、精细的工作。”
这里提到的RoboBee是哈佛团队研发的微型机器人。RoboBee不但能够飞行、潜水、游泳,还能从水面弹射而起,并且安全在地面降落。
对于毫米级的机器人来说,能够在空中和水中飞行有很多挑战。比方水的密度比空气大1000倍,因此两种介质中翅膀拍打的速度相差很大。最后的实验结果是,空中飞行时翅膀拍打频率220-300Hz、水中潜行时9-13Hz。
微型机器人的另外一个挑战是,水的表面张力是RoboBee重量的十倍以上。怎么才能从水面跃出?为解决这个问题,首先是给RoboBee加装四个浮力支腿,以及一个创造性的解决方案。
一旦RoboBee浮到水面,中央集气室中的电解板就会把水转化为可燃气体氢和氧,然后点火引燃把机器人推离水面。不过目前的技术,还无法做到RoboBee出水后立即恢复飞行,研究团队正在为此而努力。
更多细节,可以查看这个页面:
https://www.seas.harvard.edu/news/2017/10/new-robobee-flies-dives-swims-and-explodes-out-of-water
工程与应用科学学院副教授Walsh称,医疗机器人的一大吸引力在于它们能够对于人们的生命产生积极影响。Walsh所在实验室开发的软体机器护甲可以帮助中风病人更轻松地行走。在哈佛医学院及附近的16家附属医院和研究机构,机器人专业的老师处于非常重要的位置,他们要判断机器人是否能满足病人的需求,并与内科医生合作,制定运动方面的解决方案。
比如,在美国国家卫生研究院支持的一项工作中,Howe和哈佛大学附属波士顿儿童医院小儿心脏外科的生物工程学主任Pierre Dupont就在一像用于不停跳心脏手术的机器人技术上进行了多年合作。他们目前正在研究用机器导管来补偿心脏跳动动作的补充途径,这项研究的成功将能够用微创操作令病人避开心脏直视手术。
“这对于病人来说就好多了——更小的创伤、更低的风险。”Dupont说,“我们在努力开发临床医生们做梦都想不到的技术。”
同时,Walsh的exosuit柔性外骨骼技术已经授权给了ReWalk机器人公司,这家公司计划今年将它投入临床试验,迈出让这种机器五年从概念走向市场的第一步。
Walsh说:“我发现我们所做的事情有各种真正改变人们生活的机会。”
他的工作在医疗上有着各种各样的应用,比如防止心脏衰竭,帮脊髓损伤患者增强手臂功能、提高中风后的运动能力等等。这些应用,都离不开美国国防部先进研究项目局(DARPA)的早期支持,他们本来的目标,是要用外骨骼来减轻100磅行军装备给士兵的负担。
软性外骨骼将功能性服装的特性,与精确布置的线缆和电机结合起来,有效地帮助穿着者移动。
“使用柔性系统能让系统很轻,没有限制性,在行走时对人类的生物力学影响最小,同时能在穿着者肌肉动作的基础上做出提升。”Walsh介绍说:“问题是,我们能对一个人的移动性产生积极影响吗?”
目前,跑步机和数英里行军测试的结果显示,柔性外骨骼的影响大概有15%。另外,Walsh的团队在中风病人身上的实验表明,外骨骼能帮助使用者抬脚离地、运动脚踝,减少肢体之间的功能性不对称,提高行走效率。
这套外骨骼系统要继续进化,面临的主要挑战是尽可能降低重量,最大限度地提供帮助,以及让外骨骼尽可能与自然运动同步。
行为问题
和机器如何运动同等重要的,是它怎样思考,哈佛的科学家们也在认真思考这个现实。工程和计算机科学助理教授、哈佛敏捷机器人实验室(Harvard Agile Robotics Lab)主任Scott Kuindersma将他的目光投向了控制系统的完善,想由此让机器人实现全部潜力。
“我认为,机器人在物理上的能力已经够用了,但它们想要实现动态极限的性能还很难,也缺少在现实环境中完成任务所需的稳健性。问题主要在于计算。”Kuindersma说
Kuindersma所在实验室最新的成果是双足行走机器人Cassie,它长得有点像鸵鸟,由Agility Robotics设计。Cassie是Kuindersma认为该具备更好性能的硬件典型。
Cassie来自Agility Robotics,这个机器人堪称脖子以下全是腿,以模仿人类步态的方式移动。
与早先的双足机器人ATRIAS相比,Cassie可谓是全方位的升级,尺寸有了显著的缩小。特别是在电池、腿部设计和计算能力方面,都有显著改进,这让Cassie更加灵活。Agility Robotics为这个机器人自行设计了锂电池组作为电源。
Cassie的臀部有三个自由度,跟人类一样,所以这个机器人可以前后移动自己的腿、从一边到另一边、还能同时转动。Cassie也配备了电动的脚踝,所以能够站在原地不动,而不需像常见的双足机器人一样得不断移动双脚。
未来这种机器人,可以把技术共享给搜救、外骨骼等机器人领域,不过Agility Robotics想让这种机器人主要去干快递……
Kuindersma说:“[Cassie]用的控制软件是他们公司开发的,我们会删除替换它。我们的目标是把Cassie用作实验平台,开发出推进运动性能超越目前顶尖水平的算法。对于我们来说,借助高速视觉传感器反馈来规划动态行走,演示户外高速运动会是一个重要里程碑。”
“想想山羊,”他说,“它们能爬上悬崖峭壁,在复杂的地形中迅速决定该把脚放在哪。我们想构建一种算法,让机器人也能实现这样的能力。”
Kuindersma探索着如何更好地控制复杂个体行为,而Nagpal的研究刚好反过来:如何驱动简单个体组成的群体,实现复杂行为。
Nagpal说:“我的实验室的主题一直是通过简单实现复杂。无论是哪一类智能体——蚂蚁、人、机器人——个体所能做的事情总是有限的,我们通过组成团队来超越这个限制。已经进化到组团工作的动物可以利用这些东西。”
从纳米比亚白蚁合作堆土堆的行为中受到启发,Nagpal发现了一种模式,社会化昆虫能在没有中央协调的情况下处理具有挑战性的任务。
“自然界中有一些不需要多少协调的例子,我们正在用这些方法,”Nagpal说,“这就为多个部分的合作提供了可能性。这些部分不用很复杂,它们之间的协调也不用很复杂,你还是可以实现复杂的目标。”
小型kilobot就是Nagpal开发的一种机器,这种机器人依照简单的原则来行动,例如邻居的位置和行为。一群kilobot聚集起来,可以完成复杂的任务,比如说它们在某次展示中组成了海星形状。
这些任务都不依赖复杂的计算机大脑,也没有领导者-追随者系统,她的团队还在白蚁的启发下开发了一种机器人,能协作搭建用户指定的结构。
Nagpal说:“我们可以制定规则,让它们总是构建正确的结构,而用到的机器人是5个10个还是50个都没关系,每个机器人不知道其他机器人在哪,它们的顺序也无关紧要。”
她认为,这些机器人与环境传感器配合,在灾难响应和勘探上都有着应用潜力。遵循简单的规则,机器人可以建起沙袋墙,她的实验室还正在开发一种廉价的机器鱼,将来可以用来探测海底,对于价格昂贵又每次只能探测一个地方的潜水器来说,可能会成为一种补充或替代。
kilobot的发展是技术快速进步的结果,这种进步不仅提升了前沿系统的复杂性,也大大降低了现成组件的价格。
“我本以为我永远不会有硬件可用,不过我这么想的原因是一个机器人就要花掉10万美元。”Nagpal说,“[现在]我做一个新机器人只需要几百刀,在我的实验室里,这就是一种日常。我还有一千个机器人,每个只需要20刀。”
她将kilobot技术授权给了小型移动机器人制造商K-Team,现在,全球还有10个实验室有kilobot,其中两个拥有1000只机器人的集群。
“这真是太神奇了,人们可以用kilobot系统实现想象,做各种各样我根本想不到的事情。现在,这是一个充满活力的研究领域。”Nagpal 说。
Kilobot整套系统,其实是研究团队进行的一次群体机器人算法测试。如果你想更多了解这方面的理论研究,可以看看下面这篇论文:
Kilobot: A Low Cost Scalable Robot System for Collective Behaviorshttp://www.eecs.harvard.edu/ssr/papers/icra12-rubenstein.pdf
但是这套成本低廉的系统,能力却一点不差,包括差分驱动能力、机载计算能力、相邻通讯和距离感知能力、环境光感能力等等。
而且哈佛大学的团队,还对这套系统进行了开源。
所以如果你对这套系统感兴趣,可以使用任何平台(Mac、Windows、Linux)进行编程。至于硬件部分,你可以买也可以自己搭建。
主要部件:1、3.7伏电池 2、电源跳线 3、振动电机 4、三色LED 5、环境光传感器 6、串行输出接头 7、直接编程接口 8、充电标签 9、红外发射器 10、红外接收器
kilobot机器人需要在光滑平坦的表面上运作,现成的白板其实就挺好。
-
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型2024-12-29 1777
-
明远智睿SSD2351开发板:语音机器人领域的变革力量2025-05-28 591
-
仓库必备机器人,仓库管理神器!2015-01-13 5598
-
工业机器人经典好书籍——《工业机器人》2015-02-03 31959
-
【mBot申请】仓库火灾报警机器人2015-10-29 2520
-
颠覆性科技之智能机器人2015-12-22 5371
-
机器人与未来2015-12-29 6544
-
物流机器人“驾到” 这个行业是要变天了!2017-04-14 3805
-
智能电话机器人的到来,将促进传统销售企业的转型2018-05-23 2903
-
工匠机器人 vs 大国工匠2022-10-18 1754
-
物流机器人如何改变智能仓库的运作方式?2018-08-15 4295
-
随着机器人技术的不断发展成熟,传统工业生产模式也发生了巨大的变革2018-09-27 3806
-
人机协作不断提高效率 工业机器人领域正在发生巨大的变化2018-11-05 1006
-
管道机器人不仅是科技进步的象征 还改变了城市管道检测的方式2018-12-25 1733
-
AI如何改变了我们的生活2020-06-02 6799
全部0条评论

快来发表一下你的评论吧 !
