

ZMC600E,多核异构如何成就机器人精准控制?
描述
导读
ZMC600E主站控制器凭借其多核异构处理器的强大性能,实现了高算力与高实时性的完美平衡,让机器人动作流畅、精准无误。接下来,让我们深入了解其内核结构的奥秘。
在ZMC600E主站控制器控制机器人的时候,可以精准的控制机器人执行各种高难度动作。仔细观察的话你会发现机器人的每个关节都配合的很好,运行也是非常的流畅,几乎没有卡顿。究竟ZMC600E主站控制器是如何实现这么高算力、高实时性的呢?让我们来一起看看它强大的内核结构。ZMC600E主站控制器 采用的是多核异构的处理器,处理器内部包含2个主频1GHz的64位Arm Cortex-A53内核,4个主频800MHz的Cortex-R5F内核。
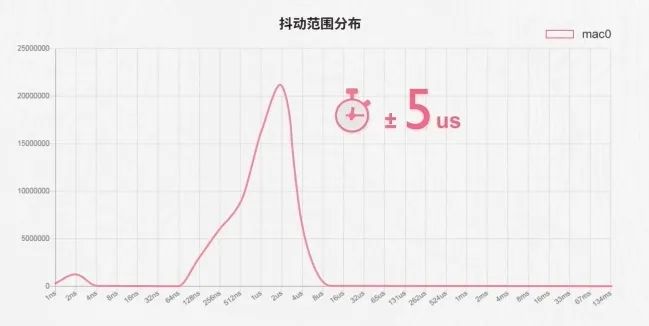
其中Cortex-A53内核运行Linux操作系统,并通过打上RT-Linux补丁来进一步提高系统的实时性,为处理算法、应用等复杂运算提供高算力的性能保障。Cortex-R5F内核则是用来单独处理EtherCAT通讯,当有数据通讯时会第一时间对接收的数据进行处理,而无需处理其他的线程任务,降低了数据的延时和抖动,可实现毫秒周期任务抖动±5μs以内,为延迟特性提供特别出色的实时性能。
通过各个内核之间分工配合的模式,将每个内核的独特优势全部发挥出来,达到高算力、高实时性的效果。大家对ZMC600E还有什么想了解的,欢迎评论区留言。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
具身机器人走得稳不稳?它可以说了算!2026-01-05 386
-
如何使用机器人分析仪EtherCAT-Analyzer抓取主从站数据?2025-12-22 1108
-
探索工业自动化核心:ZMC 系列 EtherCAT 主站控制器2025-08-18 2117
-
【一分钟教程】用ZMC600E实现关节机器人±180度精准转动2025-08-15 1085
-
ZMC600E运动控制器直线和圆弧插补算法详解2025-01-20 2188
-
ZMC600E运动控制器T型、S型速度规划详解2024-12-30 1492
-
ZMC900E控制器之ROS2环境安装指南2024-04-29 2008
-
EtherCAT主站控制器系统实时性测试2024-03-26 2042
-
ZMC900E 国产EtherCAT主站控制器 — 电源口传导骚扰整改2024-03-07 2408
-
【新品发布】ZMC600E EtherCAT主站控制器全新上市2023-03-06 2454
-
打造一个异构机器人平台2022-07-27 1941
-
工业机器人中面对的控制问题是什么2021-06-28 1580
-
新品发布,多核异构 OK5718-C开发板免费试用!2018-05-11 3946
-
免费试用卡酷教育机器人精简版套件2015-01-08 5564
全部0条评论

快来发表一下你的评论吧 !
