

plc梯形图编程实例_plc梯形图编程基本概念
编程实验
描述
plc梯形图编程中,用到以下四个基本概念:
01软继电器
PLC梯形图中的某些编程元件沿用了继电器这一名称,如输入继电器、输出继电器、内部辅助继电器等,但是它们不是真实的物理继电器,而是一些存储单元(软继电器),每一软继电器与PLC存储器中映像寄存器的一个存储单元相对应。该存储单元如果为“1”状态,则表示梯形图中对应软继电器的线圈“通电”,其常开触点接通,常闭触点断开,称这种状态是该软继电器的“1”或“ON”状态。
如果该存储单元为“0”状态,对应软继电器的线圈和触点的状态与上述的相反,称该软继电器为“0”或“OFF”状态。使用中也常将这些“软继电器”称为编程元件。
02能流
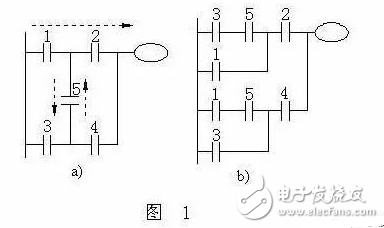
如图1所示触点1、2接通时,有一个假想的“概念电流”或“能流”(PowerFlow)从左向右流动,这一方向与执行用户程序时的逻辑运算的顺序是一致的。能流只能从左向右流动。利用能流这一概念,可以帮助我们更好地理解和分析梯形图。图1a中可能有两个方向的能流流过触点5(经过触点1、5、4或经过触点3、5、2),这不符合能流只能从左向右流动的原则,因此应改为如图1b所示的梯形图。
03母线
梯形图两侧的垂直公共线称为母线(Busbar),。在分析梯形图的逻辑关系时,为了借用继电器电路图的分析方法,可以想象左右两侧母线(左母线和右母线)之间有一个左正右负的直流电源电压,母线之间有“能流”从左向右流动。右母线可以不画出。
04梯形图的逻辑解算
根据梯形图中各触点的状态和逻辑关系,求出与图中各线圈对应的编程元件的状态,称为梯形图的逻辑解算。
梯形图中逻辑解算是按从左至右、从上到下的顺序进行的。解算的结果,马上可以被后面的逻辑解算所利用。逻辑解算是根据输入映像寄存器中的值,而不是根据解算瞬时外部输入触点的状态来进行的。
05梯形图的组成
①母线:梯形图的左侧竖直线称为起始母线,右侧竖直线称为终止母线(终止母线可以省略)。母线相当于电路中的电源线,梯形图从左母线开始,经过触点和线圈,终止于右母线。
②触点:梯形图中的触点有常开触点和常闭触点两种。这些触点可以是外部触点,也可以是内部继电器的状态,每一个触点都有一个标号,同一标号的触点可以反复使用。触点放置在梯形图的左侧。
③线圈:梯形图中的线圈类似于接触器与继电器的线圈,代表逻辑输出的结果,在使用中同一标号的线圈一般只能出现一次。线圈放置在梯形图的右侧。
plc梯形图编程实例
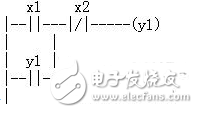
1.具有自锁功能的程序
利用自身的常开触点使线圈持续保持通电即“ON”状态的功能称为自锁。如图1所示的起动、保持和停止程序(简称起保停程序)就是典型的具有自锁功能的梯形图,X1为起动信号和X2为停止信号。
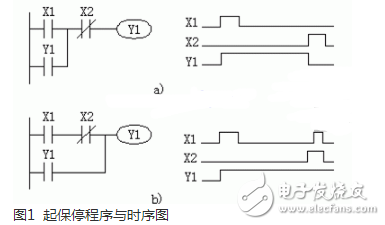
a)停止优先b)起动优先
图1a为停止优先程序,即当X1和X2同时接通,则Y1断开。图1b为起动优先程序,即当X1和X2同时接通,则Y1接通。起保停程序也可以用置位(SET)和复位(RST)指令来实现。在实际应用中,起动信号和停止信号可能由多个触点组成的串、并联电路提供。
2.具有互锁功能的程序
利用两个或多个常闭触点来保证线圈不会同时通电的功能成为“互锁”。三相异步电动机的正反转控制电路即为典型的互锁电路,如图2所示。其中KMl和KM2分别是控制正转运行和反转运行的交流接触器。
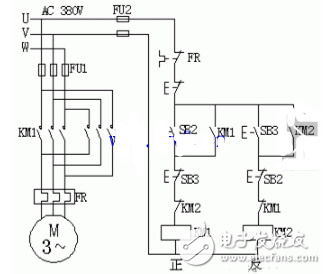
图2三相异步电动机的正反转控制电路
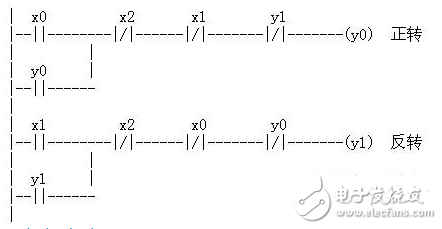
如图3所示为采用plc控制三相异步电动机正反转的外部I/O接线图和梯形图。实现正反转控制功能的梯形图是由两个起保停的梯形图再加上两者之间的互锁触点构成。
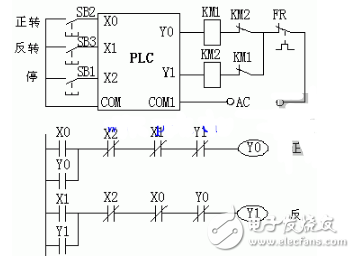
图3用PLC控制电动机正反转的I/O接线图和梯形图
应该注意的是虽然在梯形图中已经有了软继电器的互锁触点(X1与X0、Y1与Y0),但在I/O接线图的输出电路中还必须使用KM1、KM2的常闭触点进行硬件互锁。因为PLC软继电器互锁只相差一个扫描周期,而外部硬件接触器触点的断开时间往往大于一个扫描周期,来不及响应,且触点的断开时间一般较闭合时间长。例如Y0虽然断开,可能KM1的触点还未断开,在没有外部硬件互锁的情况下,KM2的触点可能接通,引起主电路短路,因此必须采用软硬件双重互锁。采用了双重互锁,同时也避免因接触器KM1或KM2的主触点熔焊引起电动机主电路短路。
PLC编程初学者的必须掌握的几个梯形图
1、启动、保持、停止电路
2.三相异步电机正反转控制电路
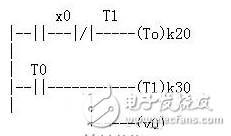
3.闪烁电路
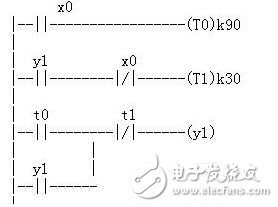
4.延时接通/断开电路
5.DF上升沿微分,DFI下降沿微分
DF:当检测到输入触发信号的上升沿时,仅将触点闭合一个扫描周期。
DFI:当检测到输入触发信号的下降沿时,仅将触点闭合一个扫描周期。
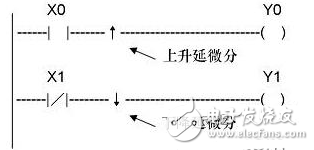
示例说明
在检测到X0的上升沿(OFF→ON)时,Y0仅为ON一个扫描周期。
在检测到X1的下降沿(ON→OFF)时,Y1仅为ON一个扫描周期。
描述
当触发信号状态从OFF状态到ON状态变化时,DF指令才执行并且输出仅接通一个扫描周期。
当触发信号状态从ON状态到OFF状态变化时,DFI指令才执行并且输出仅接通一个扫描周期。
若执行条件最初即为闭合,则PLC接通电源,则不会产生输出。
编程时的注意事项
DF和DFI指令的使用次数有限制,CX1-16R使用这两个指令的次数之和最多为128次。
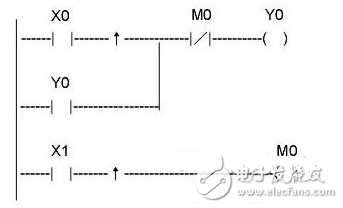
6、微分指令的应用示例
如果采用微分指令编程,可以使程序调试更加简单。
自保持回路应用示例
使用微分指令可以保持输入信号。
-
plc梯形图编程的基本原则2024-01-22 4803
-
解析四个PLC梯形图编程的基本概念2023-05-12 3705
-
plc编程入门梯形图2023-04-14 23393
-
PLC梯形图编程的基本环节和规则2023-03-17 2052
-
PLC梯形图的特点 如何懂PLC梯形图2023-03-16 8009
-
PLC梯形图是如何编程的呢?2023-03-02 1922
-
plc编程中的梯形图是什么?2021-12-08 7643
-
以三菱FX系列PLC为例 介绍PLC梯形图编程的方法2020-09-27 9018
-
PLC梯形图编程的方法2020-09-24 7772
-
PLC梯形图编程遵从的规则分享2019-05-11 7063
-
PLC梯形图编程有哪些规范_plc梯形图编程实例2018-04-26 7914
-
PLC梯形图编程八个必须步骤2014-03-24 10345
全部0条评论

快来发表一下你的评论吧 !
