

基于STM32F103RCT6移植LiteOS-M-V5.0.2-Release
电子说
描述
STM32F103RCT6移植LiteOS-M-V5.0.2-Release
下载源码
kernel_liteos_m: OpenHarmony-v5.0.2-Release
third_party_bounds_checking_function: OpenHarmony-v5.0.2-Release
third_party_cmsis: OpenHarmony-v5.0.2-Release
进入 gitee 界面后点击 克隆/下载 按钮,下载 ZIP 压缩包后解压缩。下载路径自定义。
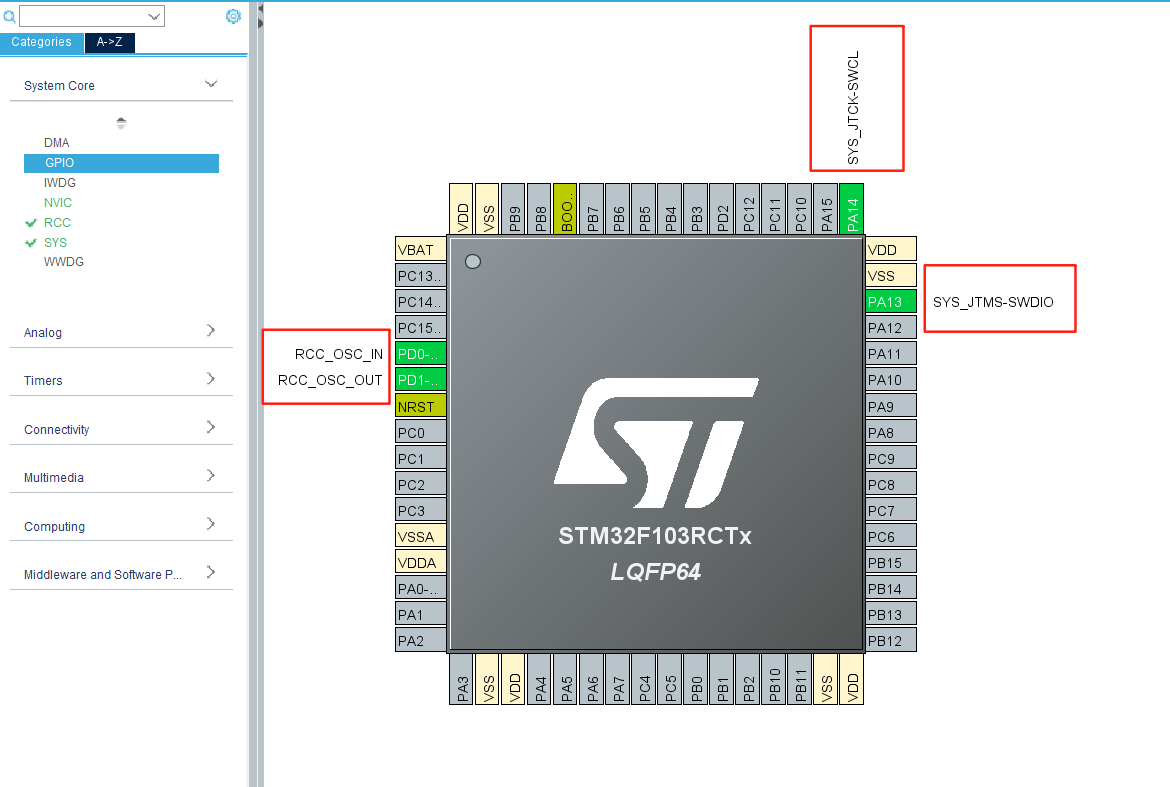
使用STM32CubeMX创建工程模板
配置晶振和烧写口
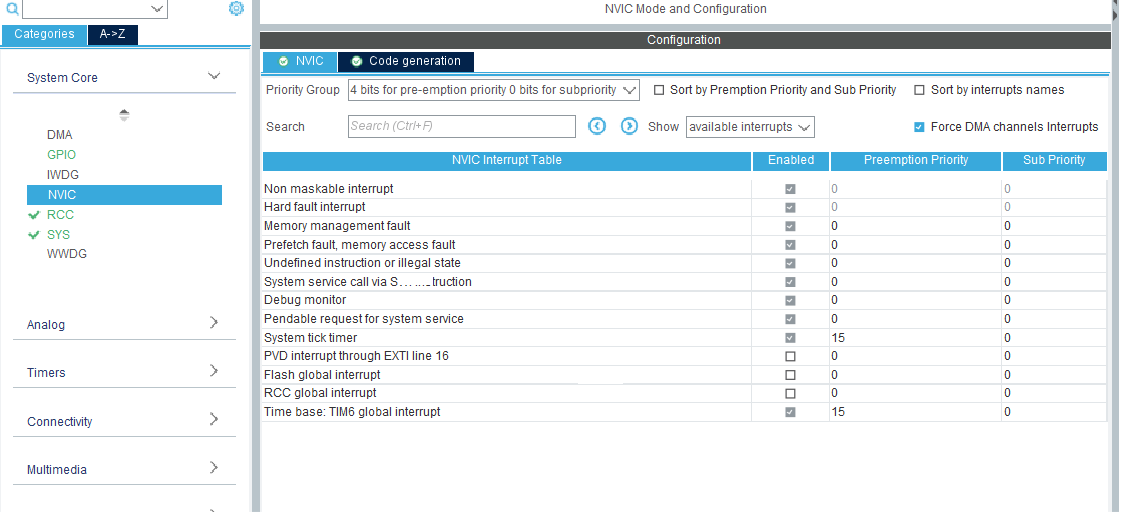
NVIC配置(默认配置,未修改)
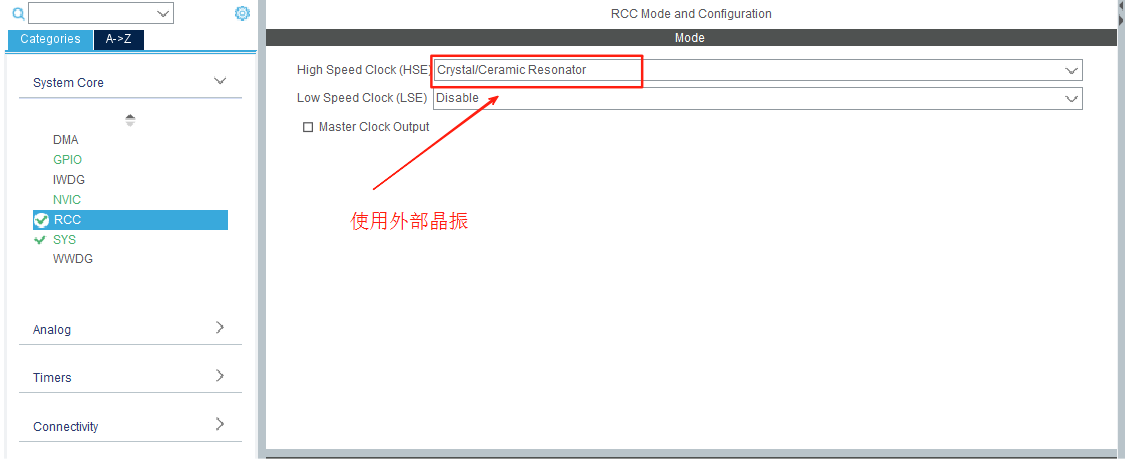
晶振配置
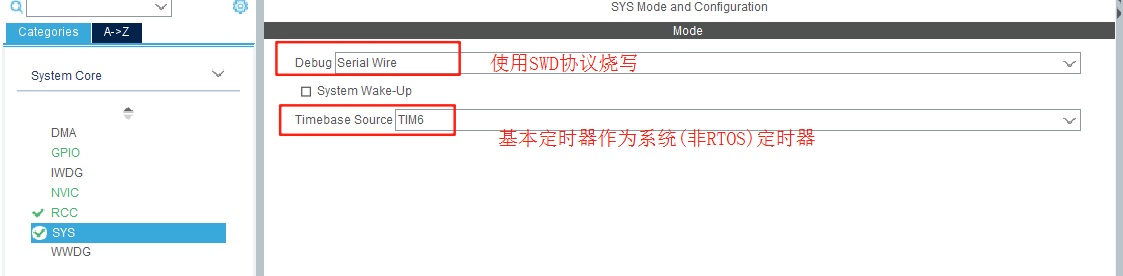
系统配置
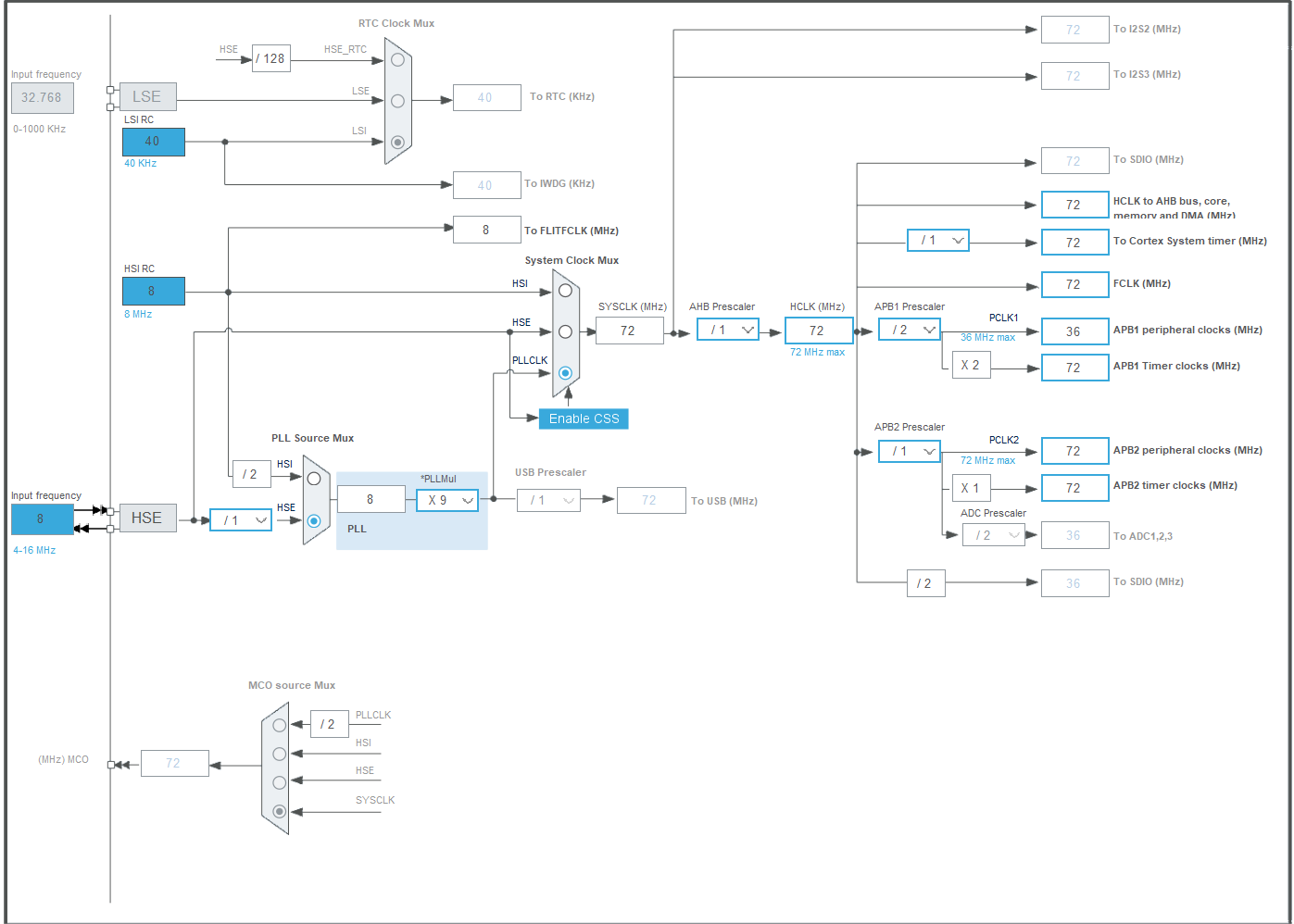
时钟配置
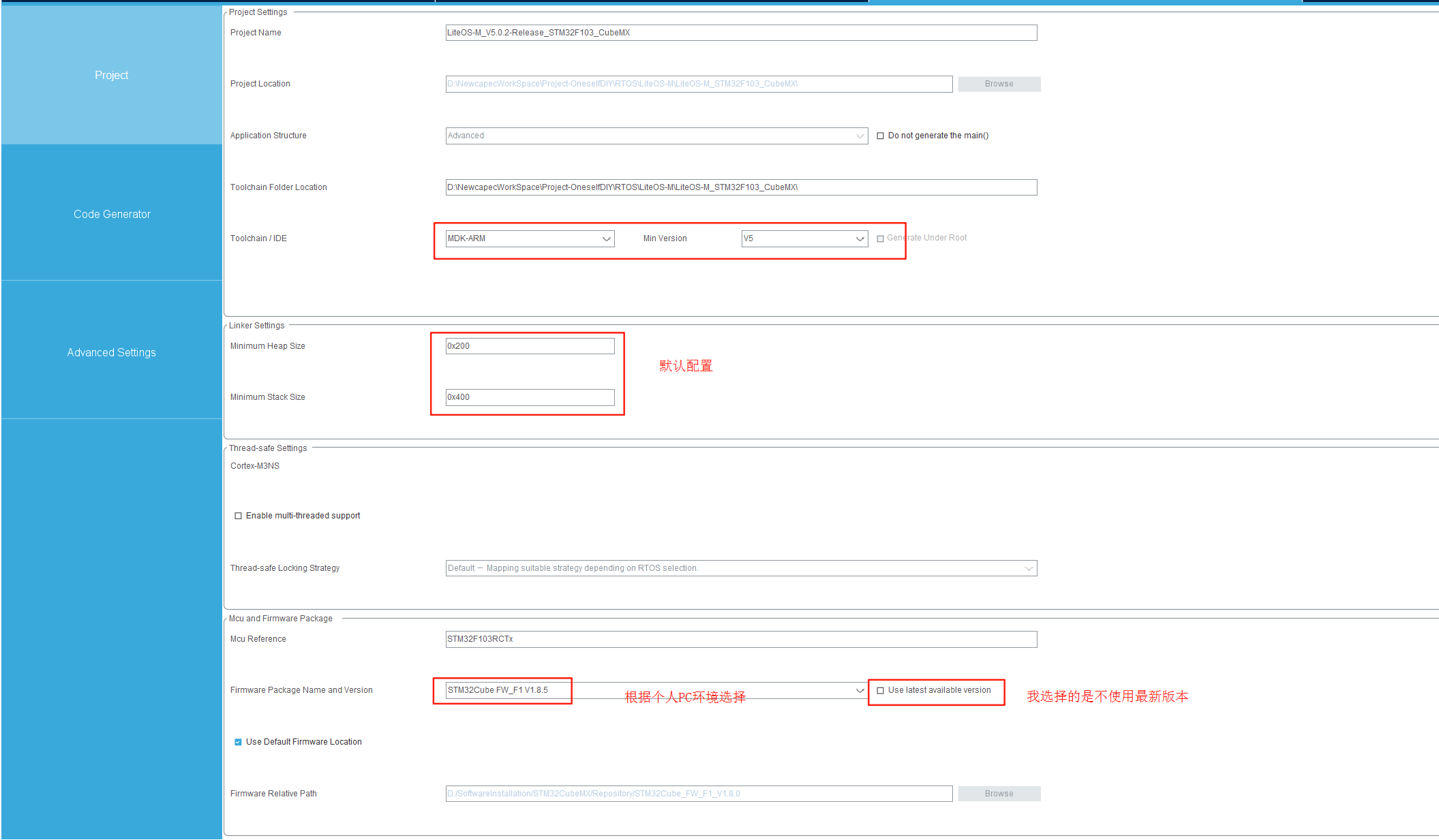
工程配置
生成路径根据实际情况配置
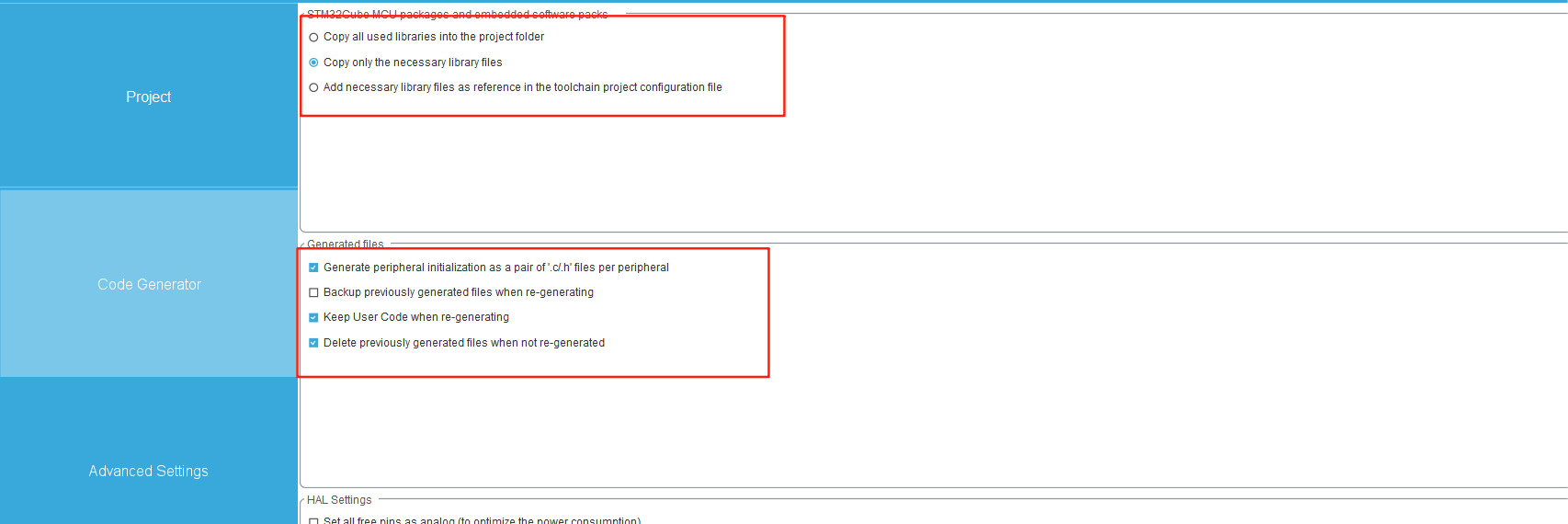
代码生成配置
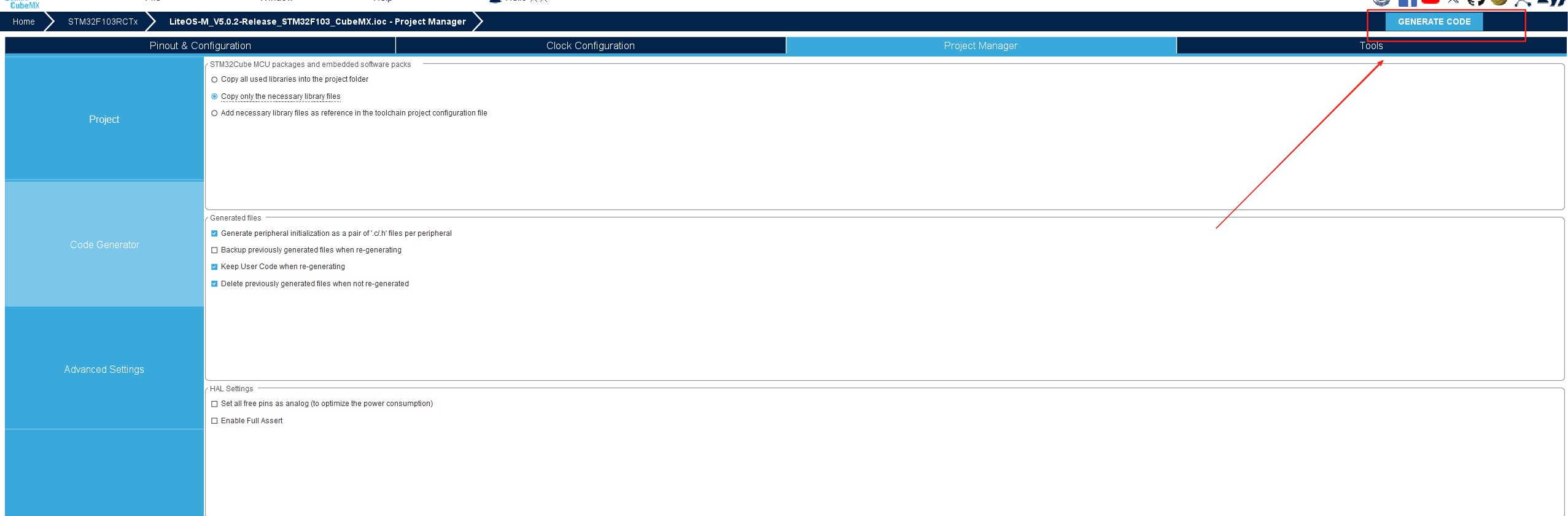
生成代码
配置使用Jlink+SWD方式下载程序
-
配置
Jlink
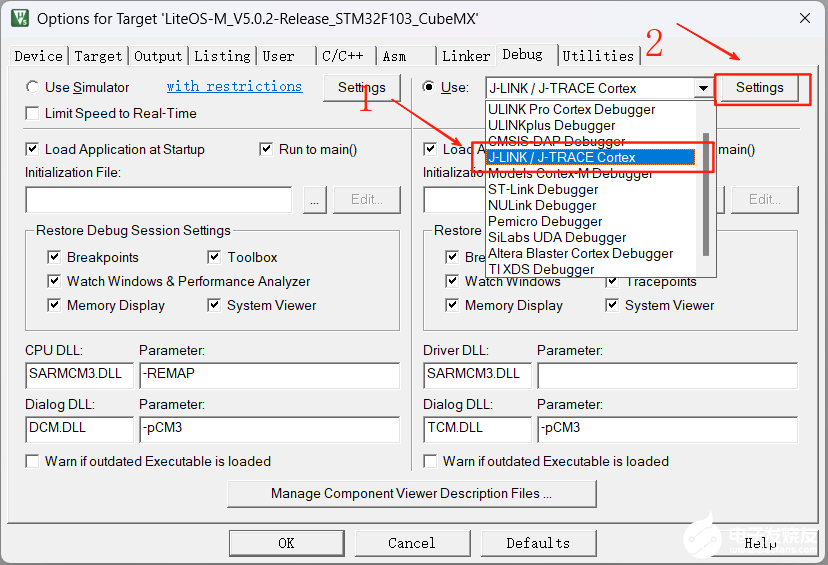
-
配置
SWD模式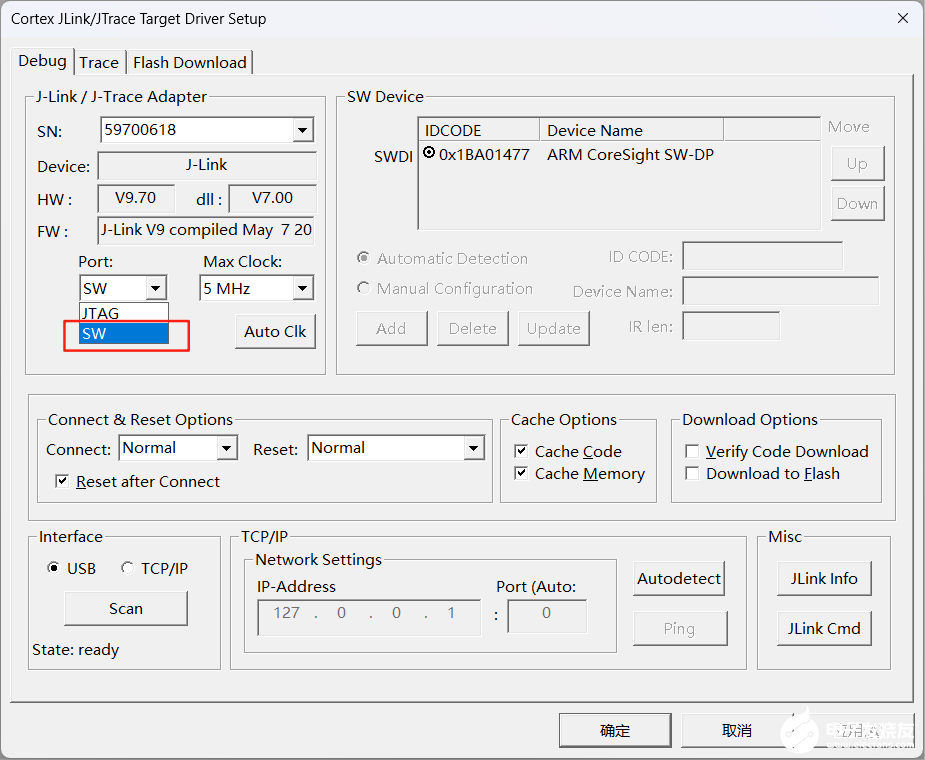
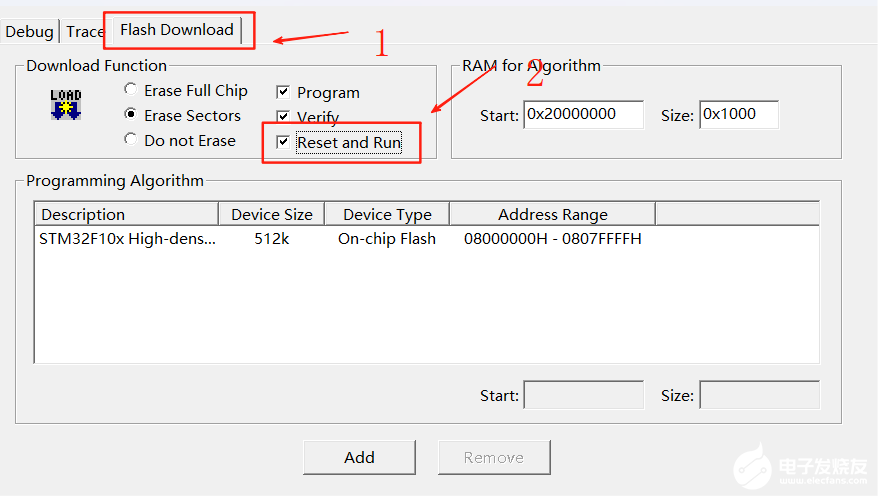
-
配置烧写成功后复位运行
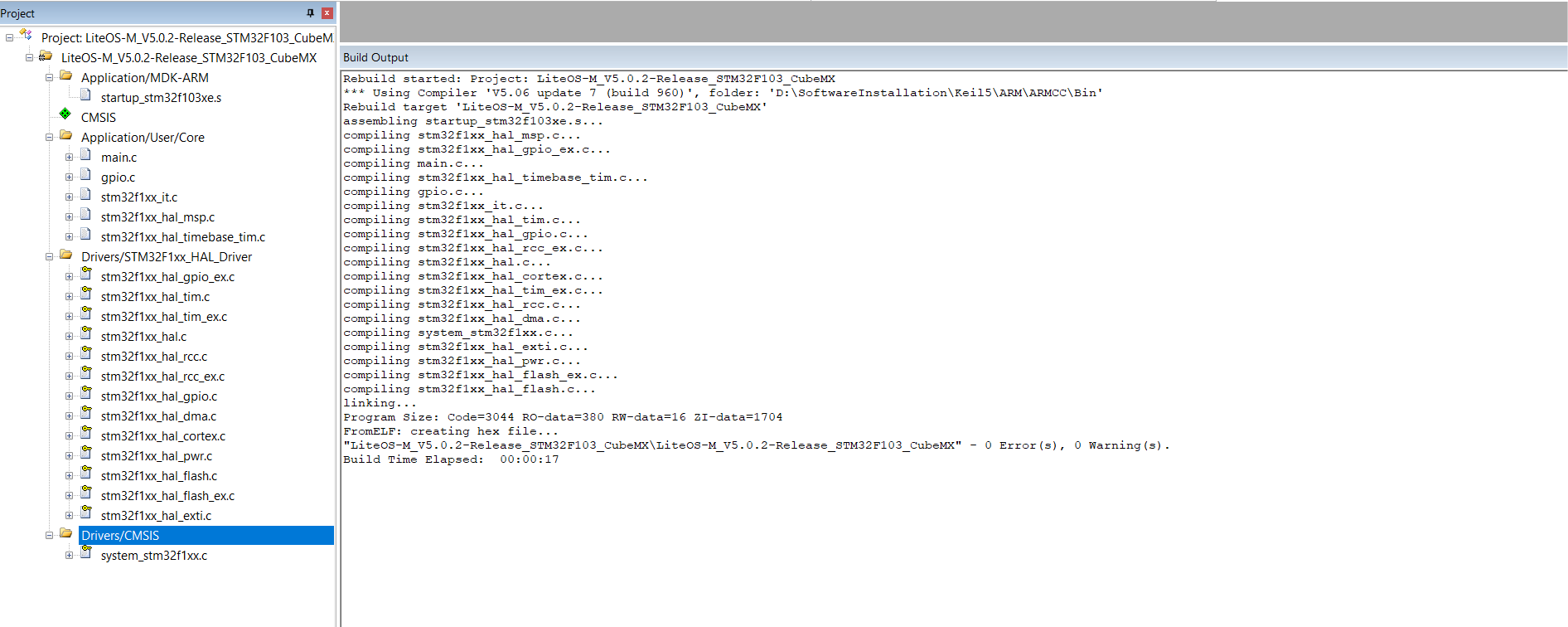
编译成功
模板添加目录
原有目录结构
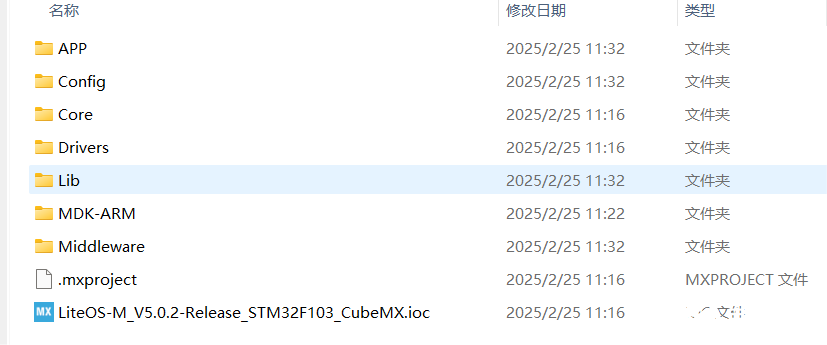
增加目录
-
APP- 应用代码 -
Config- 配置文件 -
Lib- 库文件 -
Middleware- 中间件
现有目录
添加日志库-simplelogger
simplelogger: 一款简易的日库库,主要对接 J-Link RTT 使用 - Gitee.com
下载源文件
-
进入
Middleware文件夹 -
使用
Git Base Here进入Git控制台 -
执行命令
git clone https://gitee.com/Newcapec_cn/simplelogger.git

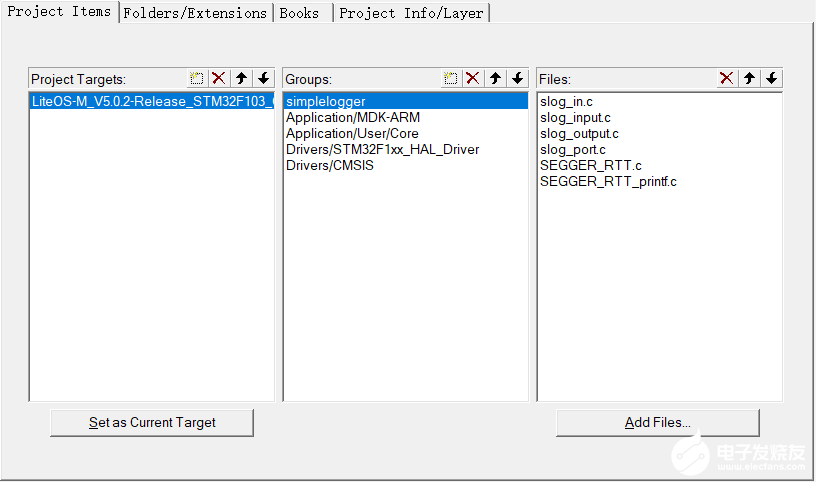
添加源文件
-
添加
Middleware\simplelogger\src\*.c -
添加
Middleware\simplelogger\port\*.c -
添加
Middleware\simplelogger\rtt\*.c
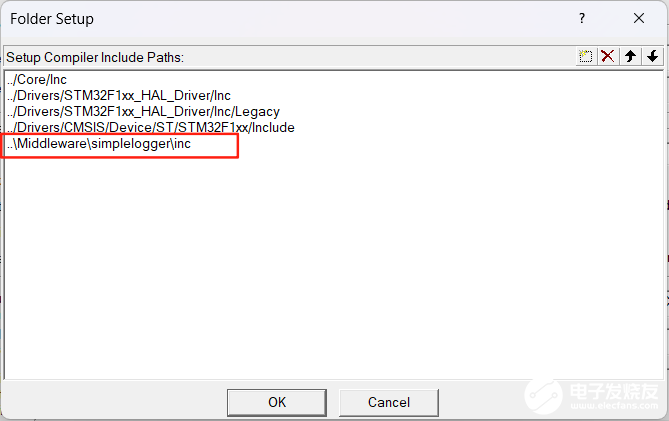
配置头文件路径
-
增加头文件路径
..\Middleware\simplelogger\inc
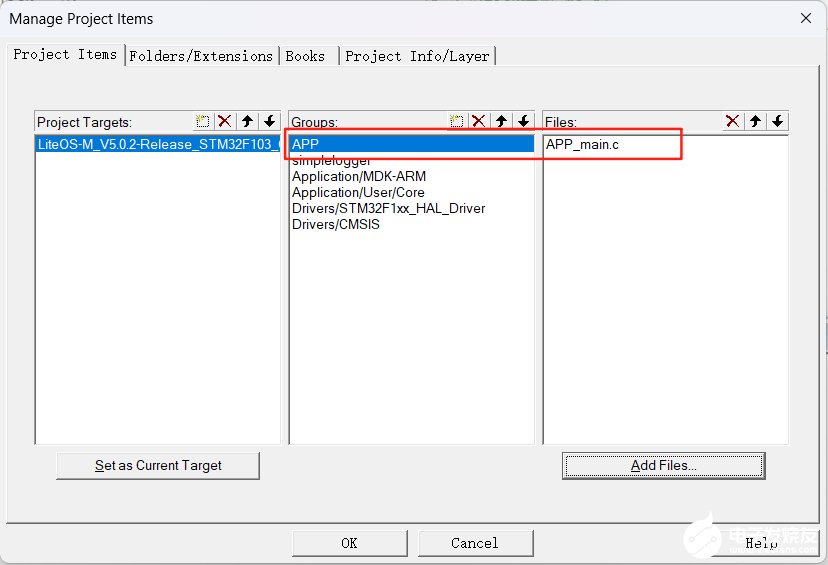
增加测试代码
-
APP文件夹创建APP_main.c文件,文件内容为
#include "slog.h"
void app_main(void) {
slog_test();
while (1) {
;
}
}
-
添加
APP_main.c文件到工程
-
在模板
main函数的while循环中添加app_main函数
void app_main(void);
app_main();
完整 main 函数如下
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
void app_main(void);
app_main();
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
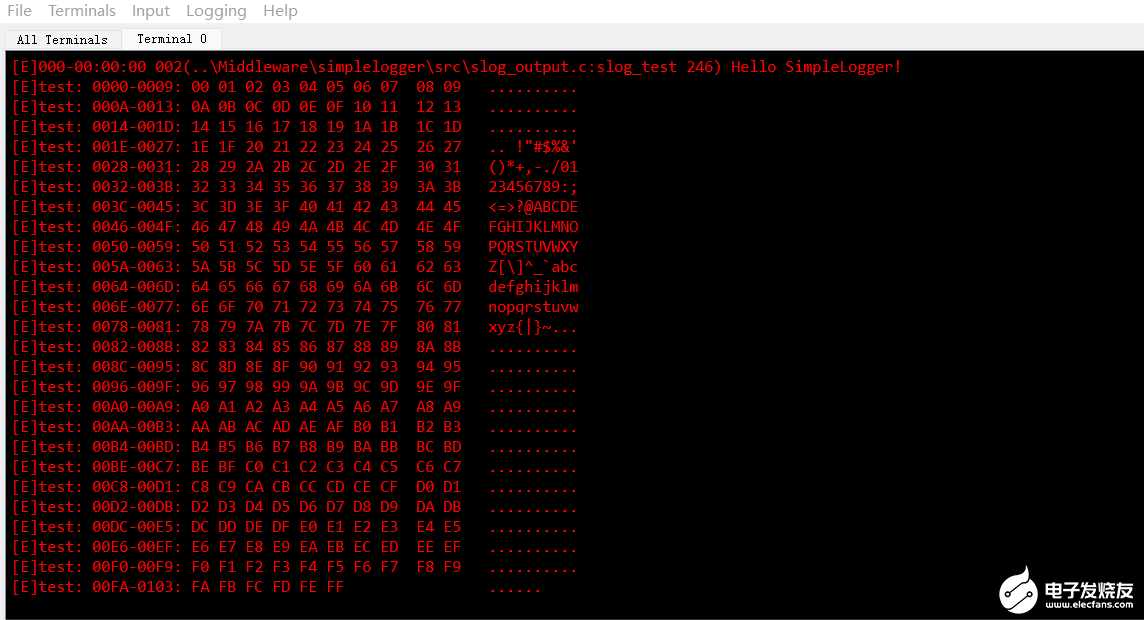
编译运行测试
测试成功界面
移植LiteOS-M
移植源码
-
将
kernel_liteos_m-OpenHarmony-v5.0.2-Release的arch、kal、kernel、utils文件夹拷贝至项目Middleware\liteos-m文件夹 -
删除文件夹
Middleware\liteos-m\arch\arm\arm9Middleware\liteos-m\arch\arm\arm4Middleware\liteos-m\arch\arm\arm7Middleware\liteos-m\arch\arm\arm33Middleware\liteos-m\arch\arm\arm55Middleware\liteos-m\arch\cskyMiddleware\liteos-m\arch\risc-vMiddleware\liteos-m\arch\xtensaMiddleware\liteos-m\kal\libcMiddleware\liteos-m\kal\libsecMiddleware\liteos-m\kal\posix -
在
Middleware\liteos-m路径下创建文件夹bounds_checking -
将
third_party_bounds_checking_function-OpenHarmony-v5.0.2-Release的include和src文件夹拷贝至项目Middleware\liteos-m\bounds_checking文件夹中 -
删除非源码文件(可不操作)
文件结构为:
liteos-m
├── arch
│ ├── arm
│ │ ├── common
│ │ │ ├── los_common_interrupt.c
│ │ │ └── los_common_interrupt.h
│ │ ├── cortex-m3
│ │ │ └── keil
│ │ │ ├── los_arch_atomic.h
│ │ │ ├── los_arch_context.h
│ │ │ ├── los_arch_interrupt.h
│ │ │ ├── los_arch_timer.h
│ │ │ ├── los_atomic.S
│ │ │ ├── los_context.c
│ │ │ ├── los_dispatch.S
│ │ │ ├── los_exc.S
│ │ │ ├── los_interrupt.c
│ │ │ ├── los_startup.s
│ │ │ └── los_timer.c
│ │ └── include
│ │ └── arch_elf.h
│ └── include
│ ├── los_arch.h
│ ├── los_atomic.h
│ ├── los_context.h
│ ├── los_interrupt.h
│ ├── los_mpu.h
│ └── los_timer.h
├── bounds_checking
│ ├── include
│ │ ├── securec.h
│ │ └── securectype.h
│ └── src
│ ├── fscanf_s.c
│ ├── fwscanf_s.c
│ ├── gets_s.c
│ ├── input.inl
│ ├── memcpy_s.c
│ ├── memmove_s.c
│ ├── memset_s.c
│ ├── output.inl
│ ├── scanf_s.c
│ ├── secinput.h
│ ├── securecutil.c
│ ├── securecutil.h
│ ├── secureinput_a.c
│ ├── secureinput_w.c
│ ├── secureprintoutput_a.c
│ ├── secureprintoutput.h
│ ├── secureprintoutput_w.c
│ ├── snprintf_s.c
│ ├── sprintf_s.c
│ ├── sscanf_s.c
│ ├── strcat_s.c
│ ├── strcpy_s.c
│ ├── strncat_s.c
│ ├── strncpy_s.c
│ ├── strtok_s.c
│ ├── swprintf_s.c
│ ├── swscanf_s.c
│ ├── vfscanf_s.c
│ ├── vfwscanf_s.c
│ ├── vscanf_s.c
│ ├── vsnprintf_s.c
│ ├── vsprintf_s.c
│ ├── vsscanf_s.c
│ ├── vswprintf_s.c
│ ├── vswscanf_s.c
│ ├── vwscanf_s.c
│ ├── wcscat_s.c
│ ├── wcscpy_s.c
│ ├── wcsncat_s.c
│ ├── wcsncpy_s.c
│ ├── wcstok_s.c
│ ├── wmemcpy_s.c
│ ├── wmemmove_s.c
│ └── wscanf_s.c
├── kal
│ └── cmsis
│ ├── cmsis_liteos2.c
│ ├── cmsis_os2.h
│ ├── cmsis_os.h
│ ├── hos_cmsis_adp.h
│ └── kal.h
├── kernel
│ ├── include
│ │ ├── los_config.h
│ │ ├── los_event.h
│ │ ├── los_membox.h
│ │ ├── los_memory.h
│ │ ├── los_mux.h
│ │ ├── los_queue.h
│ │ ├── los_sched.h
│ │ ├── los_sem.h
│ │ ├── los_sortlink.h
│ │ ├── los_swtmr.h
│ │ ├── los_task.h
│ │ └── los_tick.h
│ └── src
│ ├── los_event.c
│ ├── los_init.c
│ ├── los_mux.c
│ ├── los_queue.c
│ ├── los_sched.c
│ ├── los_sem.c
│ ├── los_sortlink.c
│ ├── los_swtmr.c
│ ├── los_task.c
│ ├── los_tick.c
│ └── mm
│ ├── los_membox.c
│ └── los_memory.c
└── utils
├── internal
│ ├── los_hook_types.h
│ └── los_hook_types_parse.h
├── los_compiler.h
├── los_debug.c
├── los_debug.h
├── los_error.c
├── los_error.h
├── los_hook.c
├── los_hook.h
├── los_list.h
└── los_reg.h
19 directories, 106 files
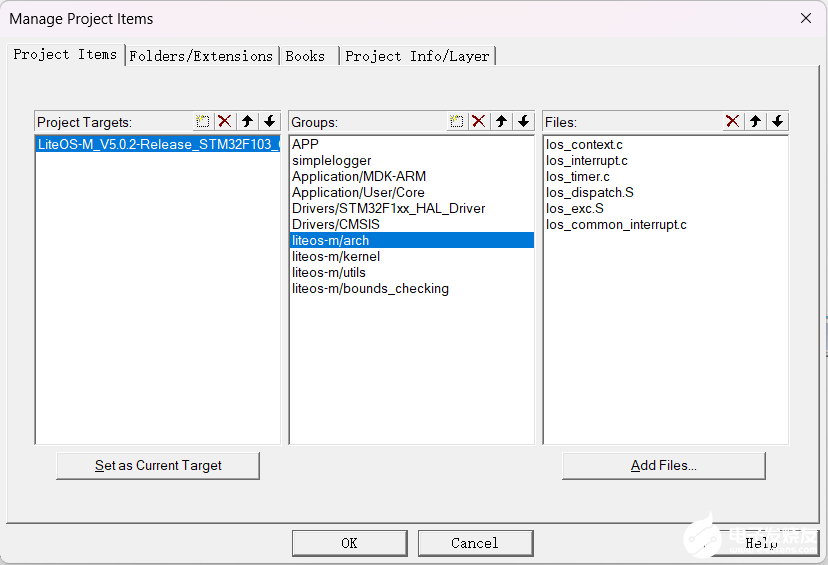
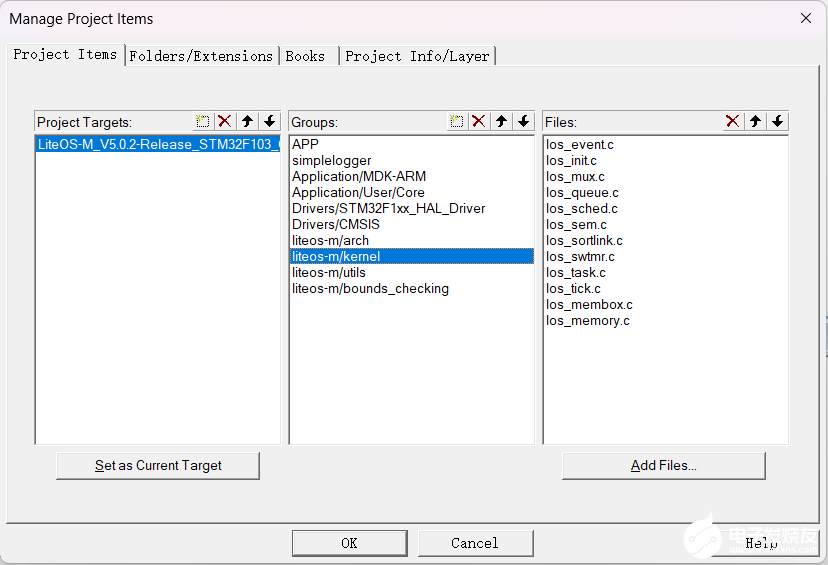
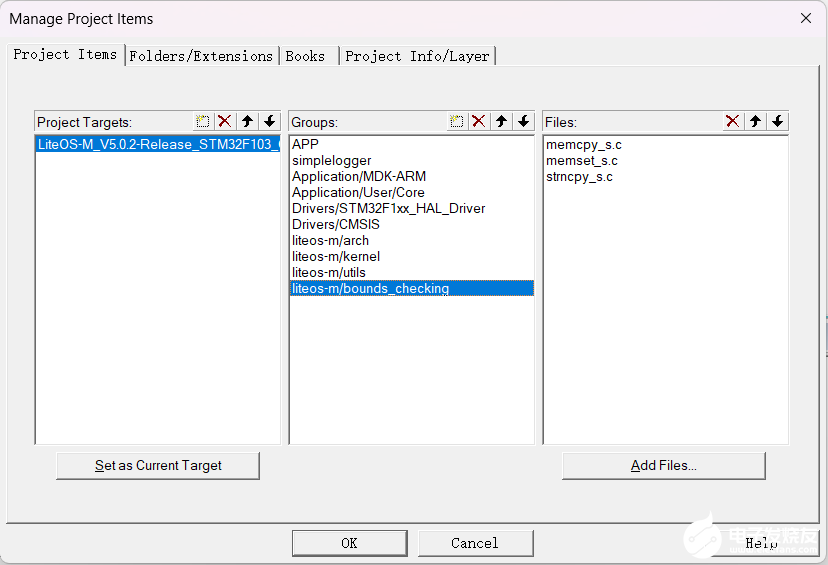
项目添加源文件
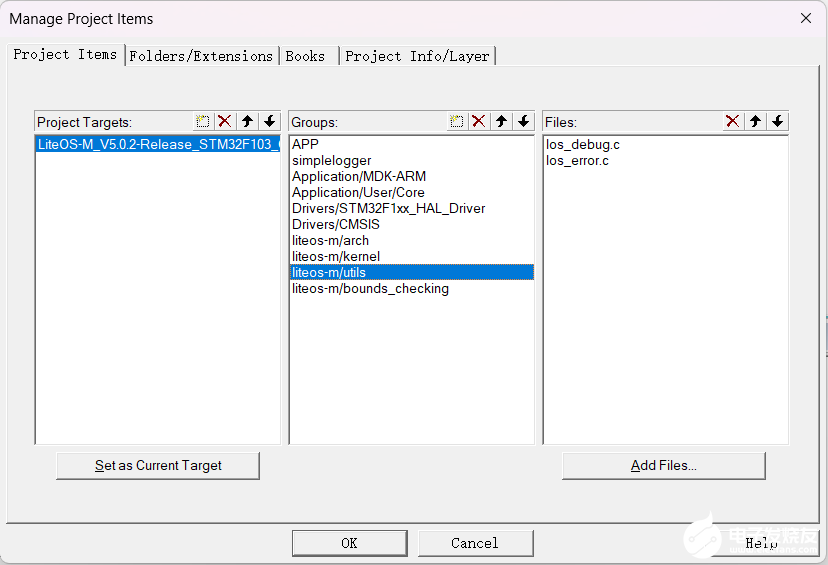
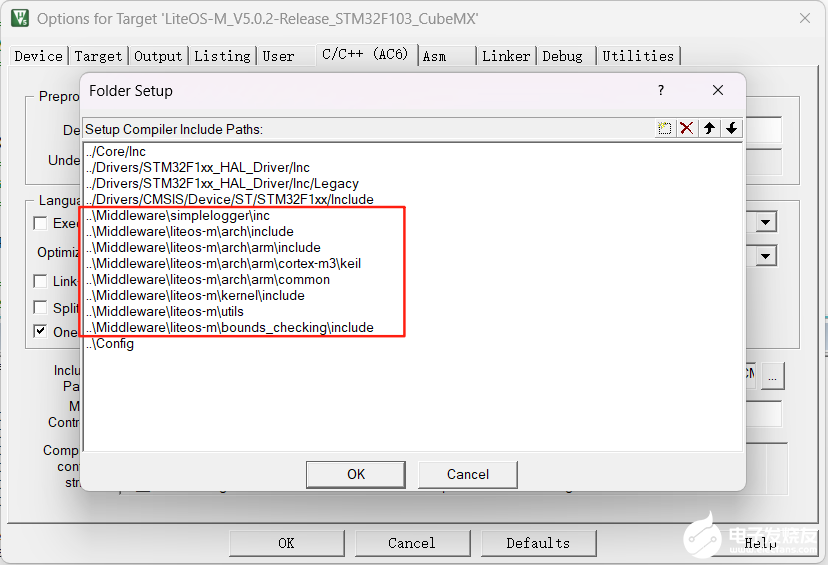
添加头文件路径
..\Middleware\simplelogger\inc
..\Middleware\liteos-m\arch\include
..\Middleware\liteos-m\arch\arm\include
..\Middleware\liteos-m\arch\arm\cortex-m3\keil
..\Middleware\liteos-m\arch\arm\common
..\Middleware\liteos-m\kernel\include
..\Middleware\liteos-m\utils
..\Middleware\liteos-m\bounds_checking\include
编译器选择
Use default compiler version 6
Use MicroLlB
C语言使用 C11 规则
C语言优化等级 -0
解决 target_config.h 未找到问题
-
在
Config文件夹下创建空文件ARMCM3.h和target_config.h -
target_config.h添加以下内容/* * Copyright (c) 2013-2019 Huawei Technologies Co., Ltd. All rights reserved. * Copyright (c) 2020-2021 Huawei Device Co., Ltd. All rights reserved. * * Redistribution and use in source and binary forms, with or without modification, * are permitted provided that the following conditions are met: * * 1. Redistributions of source code must retain the above copyright notice, this list of * conditions and the following disclaimer. * * 2. Redistributions in binary form must reproduce the above copyright notice, this list * of conditions and the following disclaimer in the documentation and/or other materials * provided with the distribution. * * 3. Neither the name of the copyright holder nor the names of its contributors may be used * to endorse or promote products derived from this software without specific prior written * permission. * * THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS * "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, * THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR * PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR * CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, * EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, * PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; * OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, * WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR * OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF * ADVISED OF THE POSSIBILITY OF SUCH DAMAGE. */ /**@defgroup los_config System configuration items * @ingroup kernel */ #ifndef _TARGET_CONFIG_H #define _TARGET_CONFIG_H #include "ARMCM3.h" #include "stm32f1xx_hal.h" #include "los_common_interrupt.h" #ifdef __cplusplus #if __cplusplus extern "C" { #endif /* __cplusplus */ #endif /* __cplusplus */ /*============================================================================= System clock module configuration =============================================================================*/ #define OS_SYS_CLOCK SystemCoreClock #define LOSCFG_BASE_CORE_TICK_PER_SECOND (1000UL) #define LOSCFG_BASE_CORE_TICK_WTIMER 0 #define LOSCFG_BASE_CORE_TICK_RESPONSE_MAX (0xFFFFFFFFUL) /*============================================================================= Hardware interrupt module configuration =============================================================================*/ #define LOSCFG_PLATFORM_HWI 0 #define LOSCFG_USE_SYSTEM_DEFINED_INTERRUPT 0 #define LOSCFG_PLATFORM_HWI_LIMIT 128 /*============================================================================= Task module configuration =============================================================================*/ #define LOSCFG_BASE_CORE_TSK_LIMIT 24 #define LOSCFG_BASE_CORE_TSK_IDLE_STACK_SIZE (0x500U) #define LOSCFG_BASE_CORE_TSK_DEFAULT_STACK_SIZE (0x2D0U) #define LOSCFG_BASE_CORE_TSK_MIN_STACK_SIZE (0x130U) #define LOSCFG_BASE_CORE_TIMESLICE 1 #define LOSCFG_BASE_CORE_TIMESLICE_TIMEOUT 20000 /*============================================================================= Semaphore module configuration =============================================================================*/ #define LOSCFG_BASE_IPC_SEM 1 #define LOSCFG_BASE_IPC_SEM_LIMIT 48 /*============================================================================= Mutex module configuration =============================================================================*/ #define LOSCFG_BASE_IPC_MUX 1 #define LOSCFG_BASE_IPC_MUX_LIMIT 24 /*============================================================================= Queue module configuration =============================================================================*/ #define LOSCFG_BASE_IPC_QUEUE 1 #define LOSCFG_BASE_IPC_QUEUE_LIMIT 24 /*============================================================================= Software timer module configuration =============================================================================*/ #define LOSCFG_BASE_CORE_SWTMR 1 #define LOSCFG_BASE_CORE_SWTMR_ALIGN 1 #define LOSCFG_BASE_CORE_SWTMR_LIMIT 48 /*============================================================================= Memory module configuration =============================================================================*/ #define LOSCFG_SYS_EXTERNAL_HEAP 0 #define LOSCFG_SYS_HEAP_SIZE 0x00008000 #define LOSCFG_MEM_MUL_POOL 1 #define OS_SYS_MEM_NUM 20 /*============================================================================= Exception module configuration =============================================================================*/ #define LOSCFG_PLATFORM_EXC 0 /* ============================================================================= PM module configuration ============================================================================= */ #define LOSCFG_KERNEL_PM 0 /* ============================================================================= printf module configuration ============================================================================= */ #define LOSCFG_KERNEL_PRINTF 2 #ifdef __cplusplus #if __cplusplus } #endif /* __cplusplus */ #endif /* __cplusplus */ #endif /* _TARGET_CONFIG_H */ -
添加
Config文件夹为头文件路径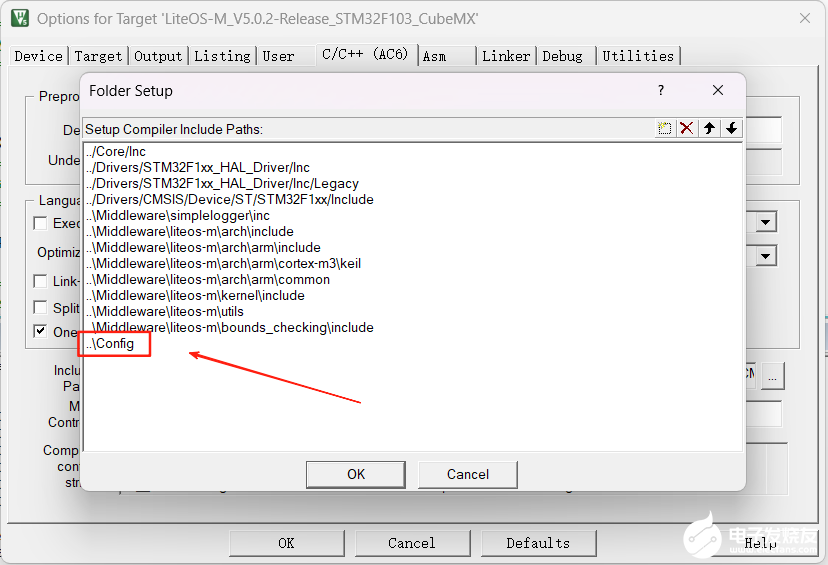
解决 HWI_PROC_FUNC 未定义问题
在 Middleware\liteos-m\arch\arm\common\los_common_interrupt.h 中添加以下代码
/* ---> liteos-m add */
#if (LOSCFG_PLATFORM_HWI_WITH_ARG == 1)
typedef VOID (*HWI_PROC_FUNC)(VOID *parm);
#else
typedef VOID (*HWI_PROC_FUNC)(void);
#endif
/* ---/ */

强制内存池4字节对齐
Middleware\liteos-m\kernel\src\mm\los_memory.c 53行 由 STATIC UINT8 g_memStart[LOSCFG_SYS_HEAP_SIZE]; 修改为 STATIC UINT8 __attribute__((aligned(4))) g_memStart[LOSCFG_SYS_HEAP_SIZE]; 增加 __attribute__((aligned(4))) 预处理
修改 SysTick_Config 参数
将 Middleware\liteos-m\arch\arm\cortex-m3\keil\los_timer.c 文件中调用 SysTick_Config 接口的参数 由LOSCFG_BASE_CORE_TICK_RESPONSE_MAX 修改为 OS_SYS_CLOCK / LOSCFG_BASE_CORE_TICK_PER_SECOND
移植 PendSV_Handler
在 PendSV_Handler 函数中调用 HalPendSV 接口
void PendSV_Handler(void)
{
/* USER CODE BEGIN PendSV_IRQn 0 */
void HalPendSV(void);
HalPendSV();
/* USER CODE END PendSV_IRQn 0 */
/* USER CODE BEGIN PendSV_IRQn 1 */
/* USER CODE END PendSV_IRQn 1 */
}
移植 OsTickHandler
在 SysTick_Handler 函数中调用 OsTickHandler 接口
/**
* @brief This function handles System tick timer.
*/
void SysTick_Handler(void)
{
/* USER CODE BEGIN SysTick_IRQn 0 */
void OsTickHandler(void);
OsTickHandler();
/* USER CODE END SysTick_IRQn 0 */
/* USER CODE BEGIN SysTick_IRQn 1 */
/* USER CODE END SysTick_IRQn 1 */
}
增加内核打印接口
-
HalConsoleOutput增加调用Jlink-RTT打印功能WEAK VOID HalConsoleOutput(LogModuleType type, INT32 level, const CHAR *fmt, ...) { /* ---> liteos-m add */ #include "../rtt/SEGGER_RTT.h" va_list ParamList; va_start(ParamList, fmt); SEGGER_RTT_vprintf(0, fmt, &ParamList); va_end(ParamList); /* ---/ */ }
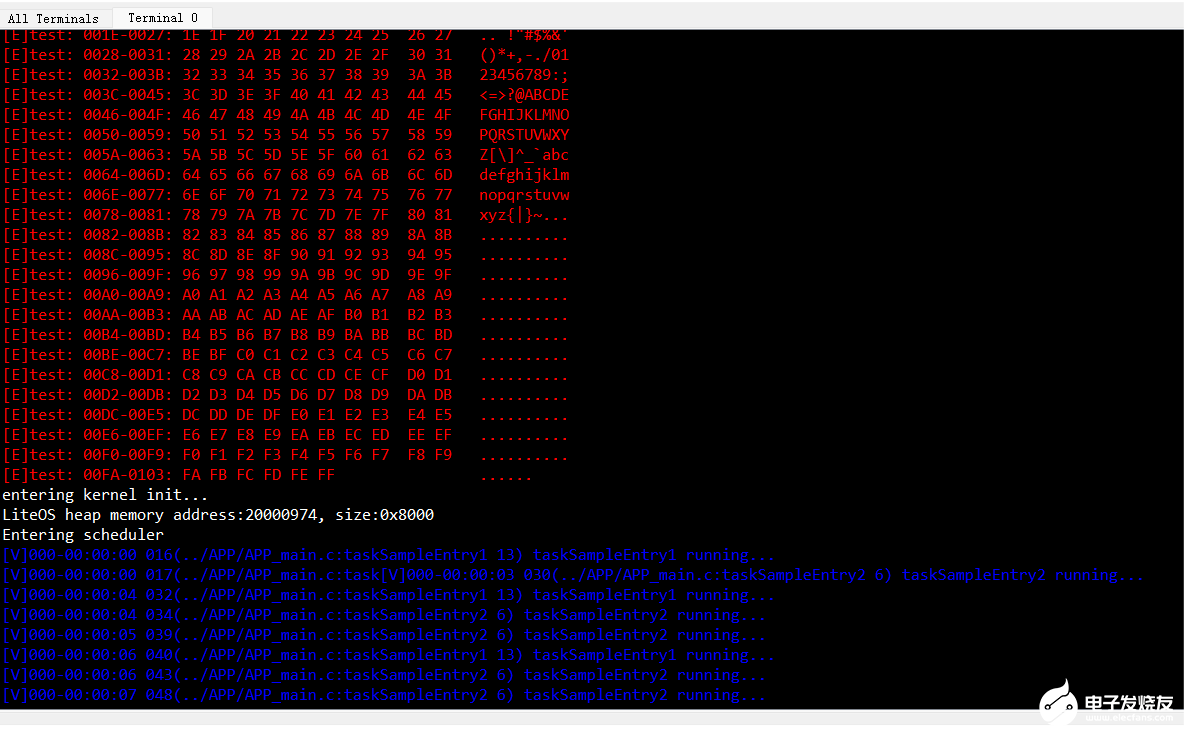
测试LiteOS-M
-
APP_main.c添加测试代码,其完整文件为:#include "slog.h" #include "los_task.h" VOID taskSampleEntry2(VOID) { while (1) { LOS_TaskDelay(1000); log_v("taskSampleEntry2 running..."); } } VOID taskSampleEntry1(VOID) { while (1) { LOS_TaskDelay(2000); log_v("taskSampleEntry1 running..."); } } UINT32 taskSample(VOID) { UINT32 uwRet; UINT32 taskID1, taskID2; TSK_INIT_PARAM_S stTask1 = {0}; stTask1.pfnTaskEntry = (TSK_ENTRY_FUNC)taskSampleEntry1; stTask1.uwStackSize = 0X1000; stTask1.pcName = "taskSampleEntry1"; stTask1.usTaskPrio = 6; uwRet = LOS_TaskCreate(&taskID1, &stTask1); if (uwRet != LOS_OK) { log_v("create task1 failed\n"); } stTask1.pfnTaskEntry = (TSK_ENTRY_FUNC)taskSampleEntry2; stTask1.uwStackSize = 0X1000; stTask1.pcName = "taskSampleEntry2"; stTask1.usTaskPrio = 7; uwRet = LOS_TaskCreate(&taskID2, &stTask1); if (uwRet != LOS_OK) { log_v("create task2 failed\n"); } return LOS_OK; } void app_main(void) { unsigned int ret; slog_test(); ret = LOS_KernelInit(); if (ret == LOS_OK) { taskSample(); LOS_Start(); } while (1) { ; } } -
测试成功界面为
适配 CMSIS
添加源码
Middleware\liteos-m\kal\cmsis\cmsis_liteos2.c
修改源码
third_party_cmsis-OpenHarmony-v5.0.2-Release\CMSIS\RTOS2\Include\cmsis_os2.h 覆盖 Middleware\liteos-m\kal\cmsis\cmsis_os2.h
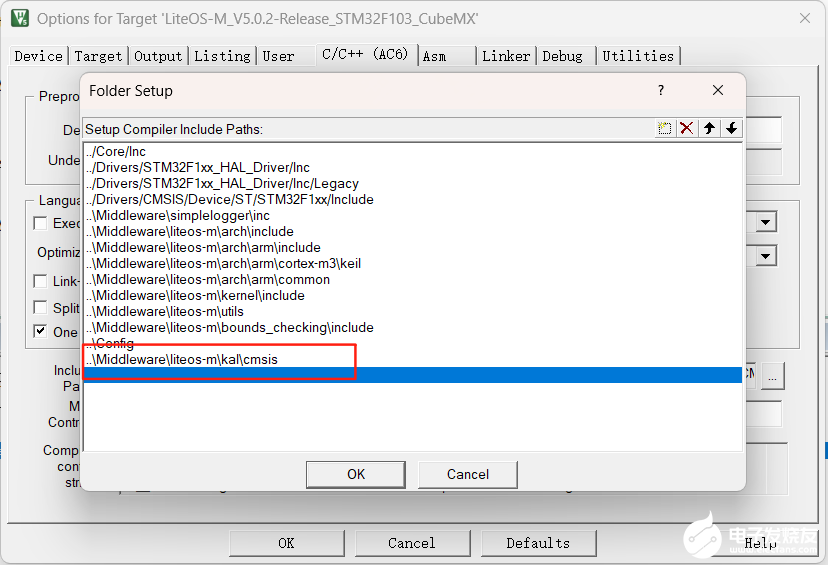
添加头文件路径
..\Middleware\liteos-m\kal\cmsis
创建使用 cmsis_os2 接口的源码
-
在
APP文件夹中创建源文件cmsis_os2_creat_thread.c,代码如下:/** * @file cmsis_os2_creat_thread.c * @author TianBeiBei (tianbeibei5628@dingtalk.com) * @brief * @version 0.1 * @date 2025-02-25 * * @copyright Copyright (c) 2025 * */ #include "slog.h" #include "cmsis_os2.h" #define MINI_TASK_DELAY_MS (1 * 1000) /* Definitions for BelowNormalTask */ osThreadId_t BelowNormalTaskHandle; const osThreadAttr_t BelowNormalTask_attributes = { .name = "BelowNormalTask", .stack_size = 1024 * 4, .priority = (osPriority_t)osPriorityBelowNormal, }; /* Definitions for NormalTask */ osThreadId_t NormalTaskHandle; const osThreadAttr_t NormalTask_attributes = { .name = "NormalTask", .stack_size = 1024 * 4, .priority = (osPriority_t)osPriorityNormal, }; /* Definitions for LowTask */ osThreadId_t LowTaskHandle; const osThreadAttr_t LowTask_attributes = { .name = "LowTask", .stack_size = 1024 * 4, .priority = (osPriority_t)osPriorityLow, }; void low_task(void *argument) { for (;;) { log_v("low_task runing"); osDelay(MINI_TASK_DELAY_MS * 3); } #if 0 osThreadExit();/* 任务退出 */ #endif } void normal_task(void *argument) { for (;;) { log_v("normal_task runing"); osDelay(MINI_TASK_DELAY_MS * 2); } #if 0 osThreadExit();/* 任务退出 */ #endif } void below_normal_task(void *argument) { for (;;) { log_v("below_normal_task runing"); osDelay(MINI_TASK_DELAY_MS * 1); } #if 0 osThreadExit();/* 任务退出 */ #endif } void liteos_m_thread_init(void) { /* Create the thread(s) */ /* creation of NormalTask */ NormalTaskHandle = osThreadNew(normal_task, NULL, &NormalTask_attributes); /* creation of BelowNormalTask */ BelowNormalTaskHandle = osThreadNew(below_normal_task, NULL, &BelowNormalTask_attributes); /* creation of LowTask */ LowTaskHandle = osThreadNew(low_task, NULL, &LowTask_attributes); } void cmsis_os2_main(void) { /* Init scheduler */ osKernelInitialize(); /* Call init function for freertos objects (in freertos.c) */ liteos_m_thread_init(); /* Start scheduler */ osKernelStart(); } -
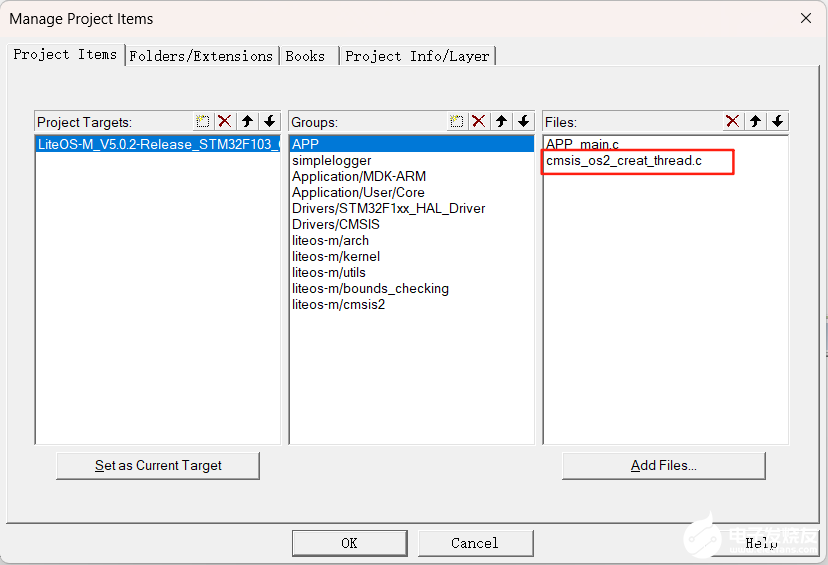
将
cmsis_os2_creat_thread.c文件添加到工程中
-
修改
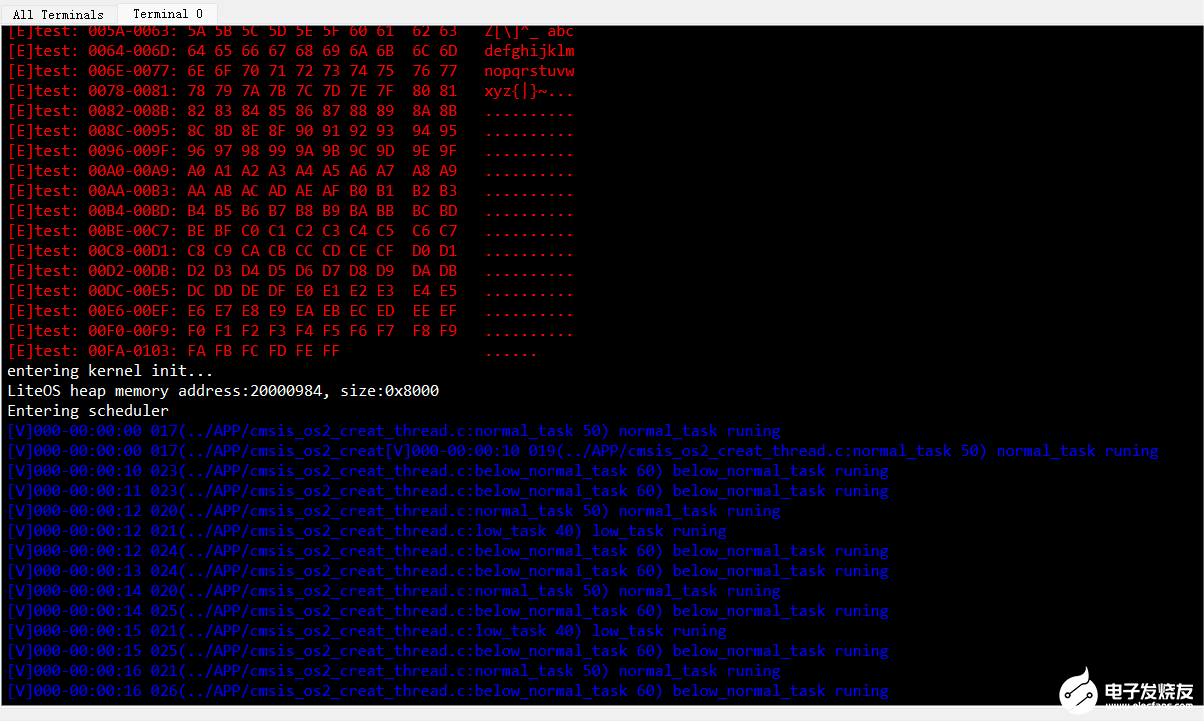
APP_main.c源码,添加调用cmsis_os2接口的代码,不再调用源码接口,修改后的源码如下:#include "slog.h" #include "los_task.h" VOID taskSampleEntry2(VOID) { while (1) { log_v("taskSampleEntry2 running..."); LOS_TaskDelay(1000); } } VOID taskSampleEntry1(VOID) { while (1) { log_v("taskSampleEntry1 running..."); LOS_TaskDelay(2000); } } UINT32 taskSample(VOID) { UINT32 uwRet; UINT32 taskID1, taskID2; TSK_INIT_PARAM_S stTask1 = {0}; stTask1.pfnTaskEntry = (TSK_ENTRY_FUNC)taskSampleEntry1; stTask1.uwStackSize = 0X1000; stTask1.pcName = "taskSampleEntry1"; stTask1.usTaskPrio = 6; uwRet = LOS_TaskCreate(&taskID1, &stTask1); if (uwRet != LOS_OK) { log_v("create task1 failed\n"); } stTask1.pfnTaskEntry = (TSK_ENTRY_FUNC)taskSampleEntry2; stTask1.uwStackSize = 0X1000; stTask1.pcName = "taskSampleEntry2"; stTask1.usTaskPrio = 7; uwRet = LOS_TaskCreate(&taskID2, &stTask1); if (uwRet != LOS_OK) { log_v("create task2 failed\n"); } return LOS_OK; } void app_main(void) { unsigned int ret; slog_test(); #if 1 /* 0-原接口 1-cmsis_os2接口 */ void cmsis_os2_main(void); cmsis_os2_main(); #else ret = LOS_KernelInit(); if (ret == LOS_OK) { taskSample(); LOS_Start(); } #endif while (1) { ; } }
测试成功界面如下:
- 相关推荐
- 热点推荐
- 移植
- Liteos
- STM32F103RCT6
-
STM32F103RCT6最小系统(高清PDF版)2022-07-31 3000
-
STM32F103RCT6的原理图2022-07-26 5272
-
STM32F103rct6标准版的电路原理图2022-03-21 5424
-
STM32F103RCT6 基于STM32Cube_FW_F1_V1.8.0库建立工程模板2021-12-08 1728
-
基于STM32F103RCT6 移植W5500 最新ioLibrary_Driver(一)2021-12-04 1843
-
STM32F103RCT6是什么2021-08-06 4608
-
STM32F103RCT6是什么?STM32F103RCT6有哪些特性?2021-07-19 4715
-
STM32F103RCT6核心板-AD原理图2021-05-21 4901
-
STM32F103RCT6移植到STM32F103C8T6需要注意那些事项2019-11-15 4688
-
STM32F103RCT6的最小系统原理图免费下载2019-08-15 9761
-
STM32F103RCT6的Sch原理图免费下载2019-04-25 4124
-
STM32F103RCT6 数据手册2017-09-20 5337
-
STM32F103RCT62017-02-15 3322
-
stm32f103rct6引脚图及使用手册2016-08-03 226059
全部0条评论

快来发表一下你的评论吧 !
