

对于一款新的BSP如何添加SPI驱动
描述
介绍
SPI总线由开发,是一种,由四个IO口组成:CS、SCLK、MISO、MOSI;通常用于CPU和外设之间进行通信,常见的SPI总线设备有:TFT LCD、QSPI FLASH、时钟模块、IMU等;开发板上集成了两路SPI总线,本次实验将重点介绍RT-Thread系统中SPI BSP驱动的移植过程,以NXP MCXA153为例。
移植流程
以SPI0为例
(1) 在board里边添加相应的外设:配置spi0外设为复位状态、设置GPIO引脚功能
(2) 添加相应的Kconfig开关,用以指示相应的外设开启与关闭(本质是通过宏定义或者条件编译的方式)
(3) 根据SDK_2_14_2_FRDM-MCXA153提供的spi示例工程编写spi总线驱动,需要实现几个关键的函数
SDK_2_14_2_FRDM-MCXA153
https://mcuxpresso.nxp.com/zh/builder?hw=FRDM-MCXA153
rt_hw_spi_init
spi_configure
斯皮克斯
(4) 添加相应的库文件依赖:fsl_lpspi.c、fsl_lpspi_edma.c
引脚对应关系

驱动文件
板。
在函数里加入以下代码 rt_hw_board_init
edma_config_t userConfig = {0};EDMA_GetDefaultConfig(&userConfig);EDMA_Init(DMA0, &userConfig);pin_mux.c
pin_mux.c
在函数里加入以下代码 BOARD_InitPins
#ifdef BSP_USING_SPI0 RESET_ReleasePeripheralReset(kLPSPI0_RST_SHIFT_RSTn); const port_pin_config_t port1_0_pin56_config = {/* Internal pull-up/down resistor is disabled */ kPORT_PullDisable, /* Low internal pull resistor value is selected. */ kPORT_LowPullResistor, /* Fast slew rate is configured */ kPORT_FastSlewRate, /* Passive input filter is disabled */ kPORT_PassiveFilterDisable, /* Open drain output is disabled */ kPORT_OpenDrainDisable, /* Low drive strength is configured */ kPORT_LowDriveStrength, /* Normal drive strength is configured */ kPORT_NormalDriveStrength, /* Pin is configured as LPSPI0_SDO */ kPORT_MuxAlt2, /* Digital input enabled */ kPORT_InputBufferEnable, /* Digital input is not inverted */ kPORT_InputNormal, /* Pin Control Register fields [15:0] are not locked */ kPORT_UnlockRegister}; /* PORT1_0 (pin 56) is configured as LPSPI0_SDO */ PORT_SetPinConfig(PORT1, 0U, &port1_0_pin56_config); const port_pin_config_t port1_1_pin57_config = {/* Internal pull-up/down resistor is disabled */ kPORT_PullDisable, /* Low internal pull resistor value is selected. */ kPORT_LowPullResistor, /* Fast slew rate is configured */ kPORT_FastSlewRate, /* Passive input filter is disabled */ kPORT_PassiveFilterDisable, /* Open drain output is disabled */ kPORT_OpenDrainDisable, /* Low drive strength is configured */ kPORT_LowDriveStrength, /* Normal drive strength is configured */ kPORT_NormalDriveStrength, /* Pin is configured as LPSPI0_SCK */ kPORT_MuxAlt2, /* Digital input enabled */ kPORT_InputBufferEnable, /* Digital input is not inverted */ kPORT_InputNormal, /* Pin Control Register fields [15:0] are not locked */ kPORT_UnlockRegister}; /* PORT1_1 (pin 57) is configured as LPSPI0_SCK */ PORT_SetPinConfig(PORT1, 1U, &port1_1_pin57_config); const port_pin_config_t port1_2_pin58_config = {/* Internal pull-up/down resistor is disabled */ kPORT_PullDisable, /* Low internal pull resistor value is selected. */ kPORT_LowPullResistor, /* Fast slew rate is configured */ kPORT_FastSlewRate, /* Passive input filter is disabled */ kPORT_PassiveFilterDisable, /* Open drain output is disabled */ kPORT_OpenDrainDisable, /* Low drive strength is configured */ kPORT_LowDriveStrength, /* Normal drive strength is configured */ kPORT_NormalDriveStrength, /* Pin is configured as LPSPI0_SDI */ kPORT_MuxAlt2, /* Digital input enabled */ kPORT_InputBufferEnable, /* Digital input is not inverted */ kPORT_InputNormal, /* Pin Control Register fields [15:0] are not locked */ kPORT_UnlockRegister}; /* PORT1_2 (pin 58) is configured as LPSPI0_SDI */ PORT_SetPinConfig(PORT1, 2U, &port1_2_pin58_config); const port_pin_config_t port1_3_pin59_config = {/* Internal pull-up/down resistor is disabled */ kPORT_PullDisable, /* Low internal pull resistor value is selected. */ kPORT_LowPullResistor, /* Fast slew rate is configured */ kPORT_FastSlewRate, /* Passive input filter is disabled */ kPORT_PassiveFilterDisable, /* Open drain output is disabled */ kPORT_OpenDrainDisable, /* Low drive strength is configured */ kPORT_LowDriveStrength, /* Normal drive strength is configured */ kPORT_NormalDriveStrength, /* Pin is configured as LPSPI0_PCS0 */ kPORT_MuxAlt2, /* Digital input enabled */ kPORT_InputBufferEnable, /* Digital input is not inverted */ kPORT_InputNormal, /* Pin Control Register fields [15:0] are not locked */ kPORT_UnlockRegister}; /* PORT1_3 (pin 59) is configured as LPSPI0_PCS0 */ PORT_SetPinConfig(PORT1, 3U, &port1_3_pin59_config);#endif
板/Kconfig
加入SPI0相关配置
menuconfig BSP_USING_SPI config BSP_USING_SPI bool "Enable SPI" select RT_USING_SPI default y if BSP_USING_SPI config BSP_USING_SPI0 bool "Enable SPI0" default endif
drv_spi.c
spi驱动层修改如下
/* * Copyright (c) 2006-2024, RT-Thread Development Team * * SPDX-License-Identifier: Apache-2.0 * * Change Logs: * Date Author Notes * 2024-08-3 hywing The first version for MCXA */#include "rtdevice.h"#include "drv_spi.h"#include "fsl_common.h"#include "fsl_lpspi.h"#include "fsl_lpspi_edma.h"#define DMA_MAX_TRANSFER_COUNT (32767)enum{#ifdef BSP_USING_SPI0 SPI1_INDEX,#endif};struct lpc_spi{ struct rt_spi_bus parent; LPSPI_Type *LPSPIx; clock_attach_id_t clock_attach_id; clock_div_name_t clock_div_name; clock_name_t clock_name; DMA_Type *DMAx; uint8_t tx_dma_chl; uint8_t rx_dma_chl; edma_handle_t dma_tx_handle; edma_handle_t dma_rx_handle; dma_request_source_t tx_dma_request; dma_request_source_t rx_dma_request; lpspi_master_edma_handle_t spi_dma_handle; rt_sem_t sem; char *name;};static struct lpc_spi lpc_obj[] ={#ifdef BSP_USING_SPI0 { .LPSPIx = LPSPI0, .clock_attach_id = kFRO12M_to_LPSPI0, .clock_div_name = kCLOCK_DivLPSPI0, .clock_name = kCLOCK_Fro12M, .tx_dma_request = kDma0RequestLPSPI0Tx, .rx_dma_request = kDma0RequestLPSPI0Rx, .DMAx = DMA0, .tx_dma_chl = 0, .rx_dma_chl = 1, .name = "spi0", },#endif};struct lpc_sw_spi_cs{ rt_uint32_t pin;};rt_err_t rt_hw_spi_device_attach(const char *bus_name, const char *device_name, rt_uint32_t pin){ rt_err_t ret = RT_EOK;
struct rt_spi_device *spi_device = (struct rt_spi_device *)rt_malloc(sizeof(struct rt_spi_device)); struct lpc_sw_spi_cs *cs_pin = (struct lpc_sw_spi_cs *)rt_malloc(sizeof(struct lpc_sw_spi_cs)); cs_pin->pin = pin; rt_pin_mode(pin, PIN_MODE_OUTPUT); rt_pin_write(pin, PIN_HIGH); ret = rt_spi_bus_attach_device(spi_device, device_name, bus_name, (void *)cs_pin); return ret;}static rt_err_t spi_configure(struct rt_spi_device *device, struct rt_spi_configuration *cfg){ rt_err_t ret = RT_EOK;// struct lpc_spi *spi = RT_NULL;// spi = (struct lpc_spi *)(device->bus->parent.user_data);// ret = lpc_spi_init(spi->SPIx, cfg);
return ret;}static void LPSPI_MasterUserCallback(LPSPI_Type *base, lpspi_master_edma_handle_t *handle, status_t status, void *userData){ struct lpc_spi *spi = (struct lpc_spi *)userData; rt_sem_release(spi->sem);}static rt_ssize_t spixfer(struct rt_spi_device *device, struct rt_spi_message *message)
{ int i; lpspi_transfer_t transfer = {0}; RT_ASSERT(device != RT_NULL); RT_ASSERT(device->bus != RT_NULL);
RT_ASSERT(device->bus->parent.user_data != RT_NULL); struct lpc_spi *spi = (struct lpc_spi *)
(device->bus->parent.user_data); struct lpc_sw_spi_cs *cs = device->parent.user_data; if (message->cs_take) { rt_pin_write(cs->pin, PIN_LOW); } transfer.dataSize = message->length; transfer.rxData = (uint8_t *)(message->recv_buf); transfer.txData = (uint8_t *)(message->send_buf); // if(message->length < MAX_DMA_TRANSFER_SIZE) if (0) { LPSPI_MasterTransferBlocking(spi->LPSPIx, &transfer); } else { uint32_t block, remain; block = message->length / DMA_MAX_TRANSFER_COUNT; remain = message->length % DMA_MAX_TRANSFER_COUNT; for (i = 0; i < block; i++)
{ transfer.dataSize = DMA_MAX_TRANSFER_COUNT; if (message->recv_buf) transfer.rxData = (uint8_t *)(message->recv_buf + i * DMA_MAX_TRANSFER_COUNT); if (message->send_buf) transfer.txData = (uint8_t *)(message->send_buf + i * DMA_MAX_TRANSFER_COUNT); LPSPI_MasterTransferEDMA(spi->LPSPIx, &spi->spi_dma_handle, &transfer); rt_sem_take(spi->sem, RT_WAITING_FOREVER); }
if (remain) { transfer.dataSize = remain; if (message->recv_buf) transfer.rxData = (uint8_t *)(message->recv_buf + i * DMA_MAX_TRANSFER_COUNT); if (message->send_buf) transfer.txData = (uint8_t *)
(message->send_buf + i * DMA_MAX_TRANSFER_COUNT); LPSPI_MasterTransferEDMA(spi->LPSPIx, &spi->spi_dma_handle, &transfer); rt_sem_take(spi->sem, RT_WAITING_FOREVER); }
} if (message->cs_release) { rt_pin_write(cs->pin, PIN_HIGH); } return message->length;}static struct rt_spi_ops lpc_spi_ops ={ .configure = spi_configure, .xfer = spixfer};int rt_hw_spi_init(void){ int i; for (i = 0; i < ARRAY_SIZE(lpc_obj); i++) { CLOCK_SetClockDiv(lpc_obj[i].clock_div_name, 1u);
CLOCK_AttachClk(lpc_obj[i].clock_attach_id); lpc_obj[i].parent.parent.user_data = &lpc_obj[i]; lpc_obj[i].sem = rt_sem_create("sem_spi", 0, RT_IPC_FLAG_FIFO); lpspi_master_config_t masterConfig; LPSPI_MasterGetDefaultConfig(&masterConfig); masterConfig.baudRate = 12 * 1000 * 1000; masterConfig.pcsToSckDelayInNanoSec = 1000000000U / masterConfig.baudRate * 1U; masterConfig.lastSckToPcsDelayInNanoSec = 1000000000U / masterConfig.baudRate * 1U; masterConfig.betweenTransferDelayInNanoSec = 1000000000U / masterConfig.baudRate * 1U; LPSPI_MasterInit(lpc_obj[i].LPSPIx, &masterConfig, CLOCK_GetFreq(lpc_obj[i].clock_name)); EDMA_CreateHandle(&lpc_obj[i].dma_tx_handle, lpc_obj[i].DMAx,
lpc_obj[i].tx_dma_chl); EDMA_CreateHandle(&lpc_obj[i].dma_rx_handle, lpc_obj[i].DMAx, lpc_obj[i].rx_dma_chl); EDMA_SetChannelMux(lpc_obj[i].DMAx, lpc_obj[i].tx_dma_chl,
lpc_obj[i].tx_dma_request);
EDMA_SetChannelMux(lpc_obj[i].DMAx, lpc_obj[i].rx_dma_chl, lpc_obj[i].rx_dma_request); LPSPI_MasterTransferCreateHandleEDMA(lpc_obj[i].LPSPIx, &lpc_obj[i].spi_dma_handle, LPSPI_MasterUserCallback, &lpc_obj[i], &lpc_obj[i].dma_rx_handle, &lpc_obj[i].dma_tx_handle); rt_spi_bus_register(&lpc_obj[i].parent,
lpc_obj[i].name, &lpc_spi_ops); } return RT_EOK;}INIT_DEVICE_EXPORT(rt_hw_spi_init);
SConscript 脚本
在文件里边加上以下代码 Libraries/MCXA153/SConscript
if GetDepend('BSP_USING_SPI'): src += ['MCXA153/drivers/fsl_lpspi.c'] src += ['MCXA153/drivers/fsl_lpspi_edma.c']
测试用例
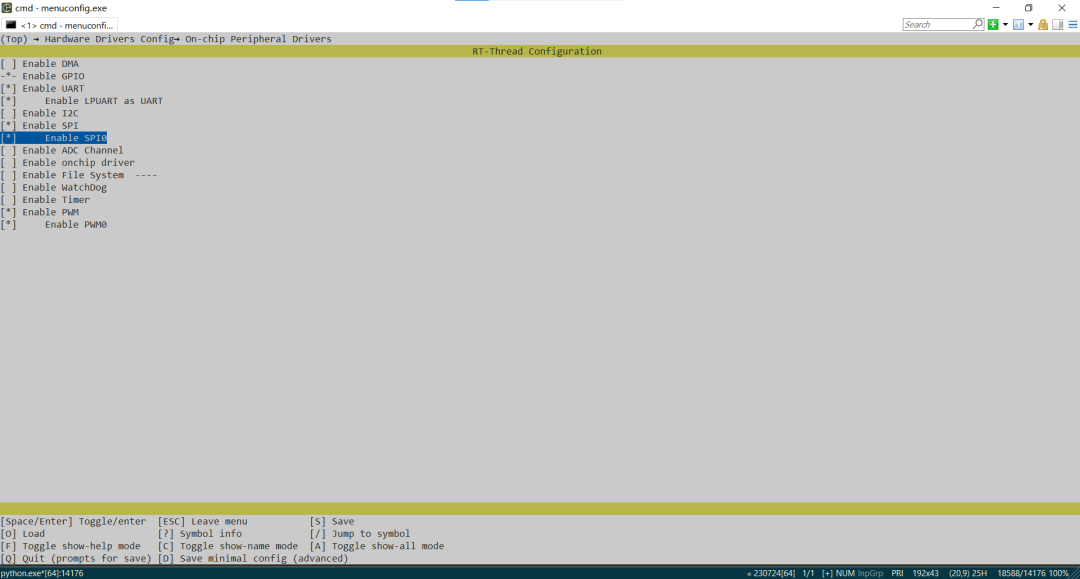
打开menuconfig使能spi0驱动
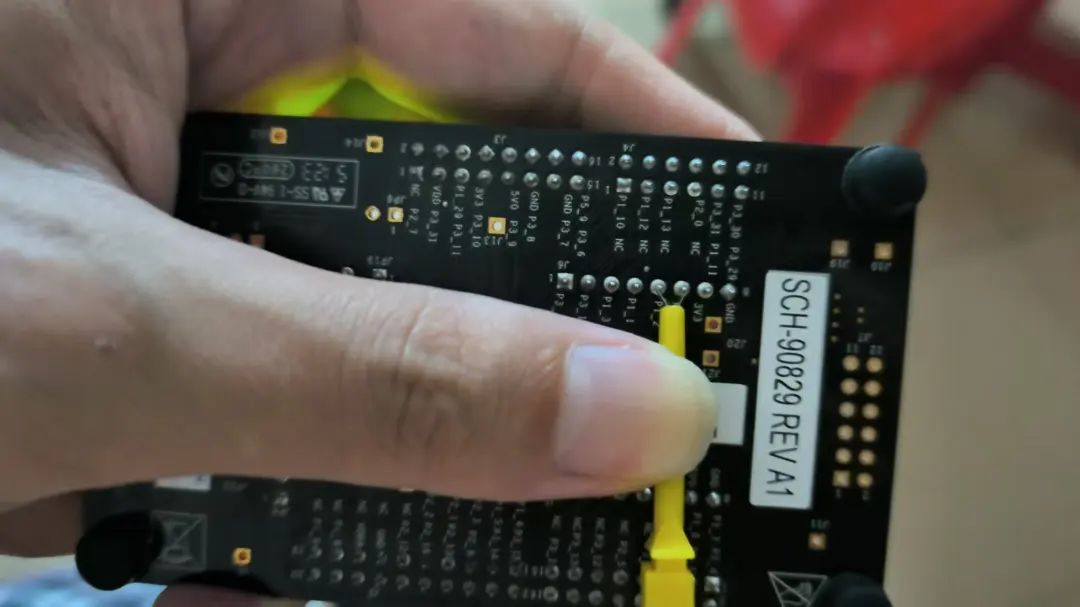
短接MISO和MOSI引脚(P1_0和P1_2)进行自发自收测试
测试程序
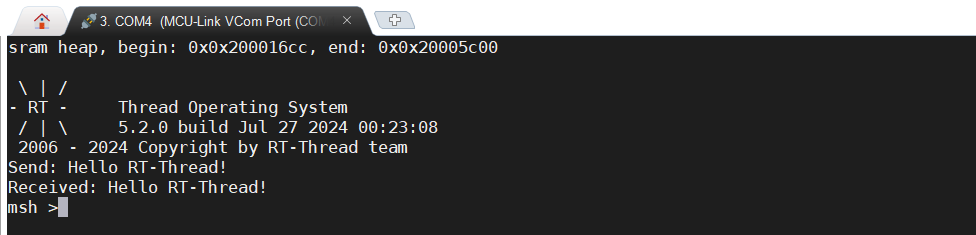
#include #include "rtdevice.h" #include "drv_spi.h"#define SPI_BUS_NAME "spi0" #define SPI_DEV_NAME "spi00" static struct rt_spi_device *spi_device;static void spi_sample(void) { rt_err_t result; struct rt_spi_configuration cfg; uint8_t tx_buf[] = "Hello RT-Thread!"; uint8_t rx_buf[sizeof(tx_buf)]; rt_base_t cs = 1*32+3; rt_hw_spi_device_attach(SPI_BUS_NAME, SPI_DEV_NAME, cs); /* »ñÈ¡SPIÉ豸 */ spi_device = (struct rt_spi_device *)rt_device_find(SPI_DEV_NAME); if (!spi_device) { rt_kprintf("can't find %s device!\n", SPI_BUS_NAME); } /* ÅäÖÃSPIÉ豸 */ cfg.data_width = 8; cfg.mode = RT_SPI_MASTER | RT_SPI_MODE_0 | RT_SPI_MSB; cfg.max_hz = 12* 1000 * 1000; /* ÉèÖÃSPIÉ豸 */ rt_spi_configure(spi_device, &cfg); result = rt_spi_transfer(spi_device, tx_buf, rx_buf, sizeof(tx_buf)); if (result == sizeof(tx_buf)) { rt_kprintf("Send: %s\n", tx_buf); rt_kprintf("Received: %s\n", rx_buf); } else { rt_kprintf("spi transfer failed! error code: %d\n", result); } } int main(void) { spi_sample(); return 0; }
运行结果
总结
另外,你也可以安装,通过图形方式配置时钟树、GPIO复用 MCUXpresso Config Tools v16
-
寻一款LED驱动芯片2013-01-08 2736
-
(转载)20D添加标准SPI驱动详解 ——(二)2020-07-21 3309
-
介绍一款SPI通讯方式的传感器2022-01-24 1103
-
快速掌握一款新MCU的方法2022-02-08 788
-
以SPI驱动为例展示如何使用ENV工具对BSP进行配置2022-07-15 2606
-
基于MM32F5270开发板RT-Thread SPI驱动适配指南2022-09-02 2134
-
RT-Thread studio华大的HC32F460 BSP工程中有没有SPI相关的驱动呢2022-09-05 2969
-
VxWorks BSP框架源代码包含头文件和驱动2013-03-26 1676
-
bsp是什么2017-10-16 137906
-
如何对SPI驱动做出具体的修改2021-04-27 1917
-
嵌入式中的BSP---BSP到底是什么2021-10-21 2326
-
一款32Mb的PSRAM芯片—JS7324SU16BSP-70LFI2022-06-29 4801
-
记录为BL808添加GPIO驱动2023-10-13 1481
-
一款低功耗LED灯驱动电路原理介绍2023-11-14 729
-
labview怎么添加设备驱动2024-01-02 4948
全部0条评论

快来发表一下你的评论吧 !
