

广西大学:用于高温应用中的压力和温度传感的摩擦电触觉传感器
电子说
描述
具有同时检测多种刺激能力的类皮肤传感器在前沿人机交互中具有巨大的潜力。然而,实现超越人类触觉感知的多模态触觉识别仍面临重大挑战。在此,来自广西大学的聂双喜研究团队于国际著名学术期刊Nature Communications(IF=14.7)合作发表了论文Triboelectric tactile sensor for pressure and temperature sensing in high-temperature applications。该团队开发了一种适应极端环境的多模态摩擦电传感器,能够检测超出人类感知范围的压力/温度。该传感器基于摩擦电纳米发电机技术,设计了一个不对称结构,能够独立输出双信号,以提高感知灵敏度。通过将信号和刺激转换为特征矩阵,实现了对复杂物体(识别率为94%)和高温下温度的并行感知。所提出的多模态摩擦电触觉传感器在最大检测范围和快速响应方面取得了进展,实现了人类皮肤高温感知的上限(60°C),其工作温度为200°C。该自供电多模态感知系统为人机/机器人/环境交互应用提供了更广泛的可能性。
图 文 导 读
在此研究中,研究团队受到撒哈拉银蚂蚁(Cataglyphis bombycina)的启发,这些昆虫能够在高温环境中保持多感官感知,他们开发了一种摩擦电传感器,使其能够在极高温度下自适应触觉感知,超越人类触觉的极限(图1a,b)。研究表明,当生物体受到机械和热刺激时,离子通道的开关会产生生理电信号,从而促进环境感知。此外,摩擦电信号与机器学习算法相结合,实现了物体识别。由于不对称结构和耐热感应材料的设计,该摩擦电传感器表现出快速的应力响应和恢复时间,分别为70 ms和58 ms。其最大工作温度可达200°C,远远超出了人类皮肤的高温感知极限(60 ℃)。此外,通过将摩擦电传感器集成到机器人手上,实现了在高温下对压力和温度的实时响应。本研究不仅解决了长期以来利用摩擦电实现高温下精准压力和温度感知的挑战,还推动了极端环境下高效智能系统的发展。 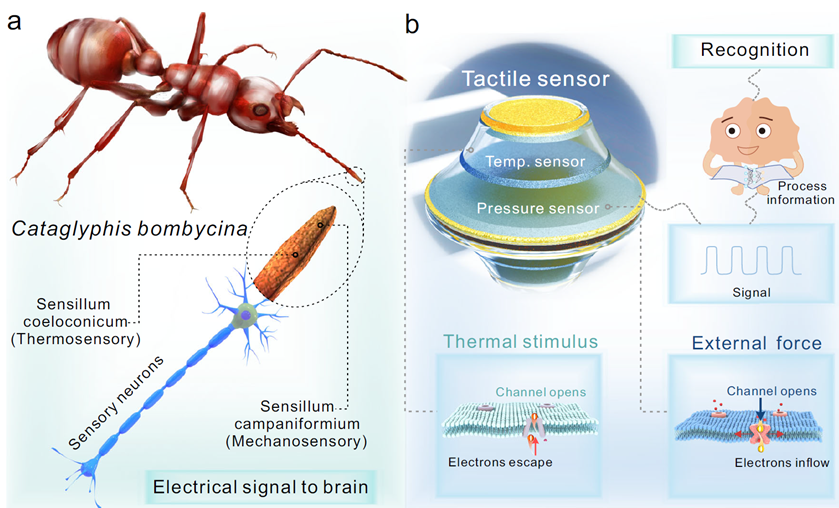 图1 仿生摩擦电传感器的原理图 人类皮肤通过机械受体和温度受体区分机械和热刺激,实现触觉和温度刺激的时空识别,以确保在复杂环境中实现安全有效的人机交互(图2a)。为了模拟自然触觉,理解和利用影响生物皮肤感知特性的关键因素至关重要。受到高温银蚂蚁以及皮肤机械受体和温度受体及其感知机制的启发,利用外部刺激下的电荷转移生成电信号,设计了一种适应极端环境的压力/温度响应摩擦电传感器。该触觉传感器由一个压力感应摩擦电纳米发电机(P-TENG)和一个温度感应摩擦电纳米发电机(T-TENG)组成(图2b)。基于接触电化学原理,该多模态传感器通过利用T-TENG的稳定接触区域,避免了力的干扰。通过利用压力和温度响应机制的耦合但低交叉灵敏度,它能够明确区分触觉和温度电信号,同时展示出高灵敏度和高温抗性(图2c),为在极端环境中响应多种刺激提供了可能性。 当受到压力和温度刺激时,传感器中具有不对称结构的摩擦电材料相互接触,导致电荷转移并进一步生成相应的电信号(图2d)。为了展示摩擦电触觉传感器在物体多模态感知和信息反馈中的应用,五个微型传感器通过激光打印的柔性和可拉伸电极组装在机器人手上(图2e),使得物体形状和温度识别变得灵活。
图1 仿生摩擦电传感器的原理图 人类皮肤通过机械受体和温度受体区分机械和热刺激,实现触觉和温度刺激的时空识别,以确保在复杂环境中实现安全有效的人机交互(图2a)。为了模拟自然触觉,理解和利用影响生物皮肤感知特性的关键因素至关重要。受到高温银蚂蚁以及皮肤机械受体和温度受体及其感知机制的启发,利用外部刺激下的电荷转移生成电信号,设计了一种适应极端环境的压力/温度响应摩擦电传感器。该触觉传感器由一个压力感应摩擦电纳米发电机(P-TENG)和一个温度感应摩擦电纳米发电机(T-TENG)组成(图2b)。基于接触电化学原理,该多模态传感器通过利用T-TENG的稳定接触区域,避免了力的干扰。通过利用压力和温度响应机制的耦合但低交叉灵敏度,它能够明确区分触觉和温度电信号,同时展示出高灵敏度和高温抗性(图2c),为在极端环境中响应多种刺激提供了可能性。 当受到压力和温度刺激时,传感器中具有不对称结构的摩擦电材料相互接触,导致电荷转移并进一步生成相应的电信号(图2d)。为了展示摩擦电触觉传感器在物体多模态感知和信息反馈中的应用,五个微型传感器通过激光打印的柔性和可拉伸电极组装在机器人手上(图2e),使得物体形状和温度识别变得灵活。 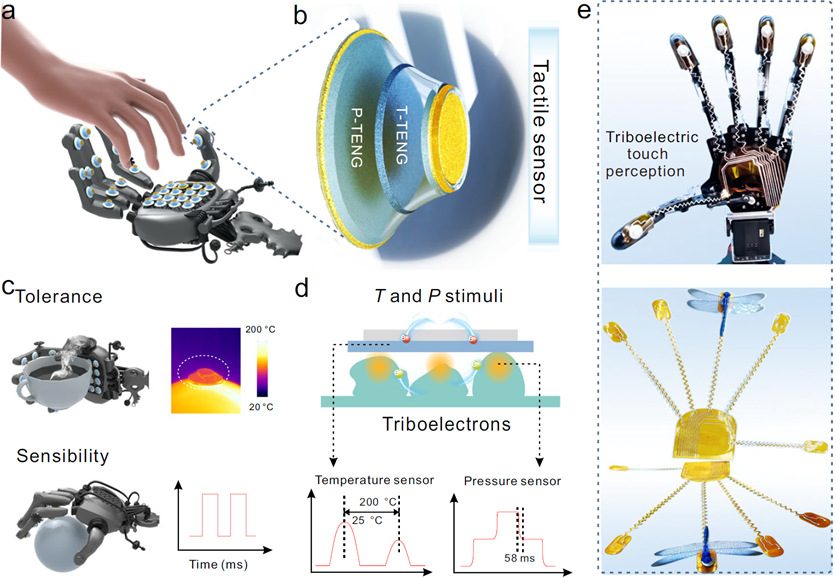 图2 超越人类触觉感知的极端环境适应性压力/温度响应摩擦电传感器 摩擦电传感器的制备过程,如图3a所示,能够响应极端环境中的压力/温度。采用两步封装策略设计了一个结构不对称的双层传感器。为了实现极端条件下的自适应响应,本研究采用了柔性、耐高温的硅胶作为外壳,以促进对压力刺激的快速响应(图3ai)。
图2 超越人类触觉感知的极端环境适应性压力/温度响应摩擦电传感器 摩擦电传感器的制备过程,如图3a所示,能够响应极端环境中的压力/温度。采用两步封装策略设计了一个结构不对称的双层传感器。为了实现极端条件下的自适应响应,本研究采用了柔性、耐高温的硅胶作为外壳,以促进对压力刺激的快速响应(图3ai)。 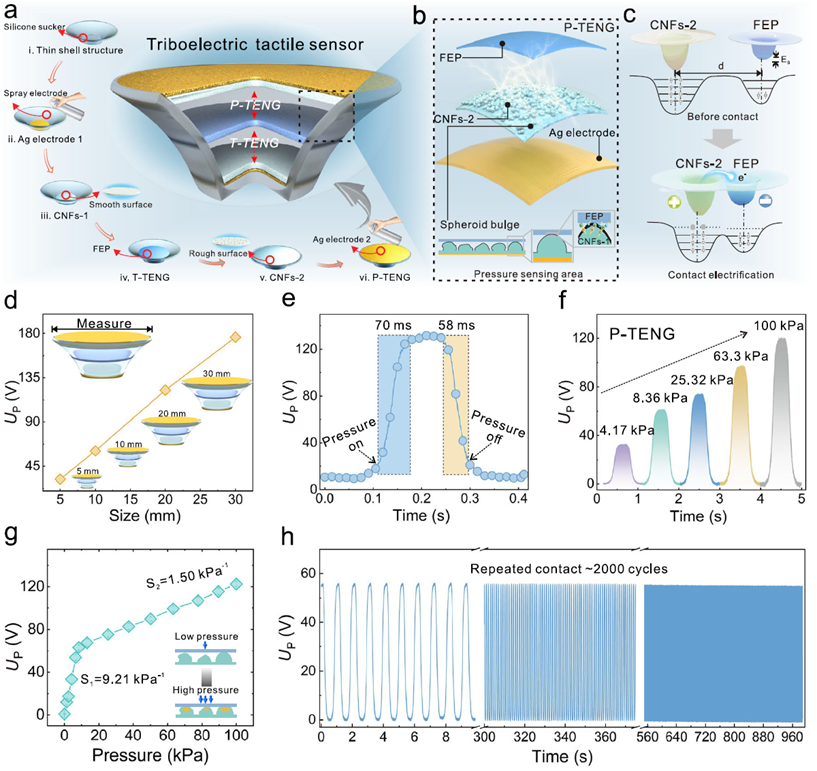 图3压力传感 温度影响摩擦电信号的大小,因此开发了T-TENG以响应温度刺激。图4a展示了T-TENG的结构和工作机制。在热刺激下,摩擦电材料的温度升高,导致存储电荷的无序耗散。该现象通过高温下的电子云模型进一步解释(图4b)。当两种材料接触时,电子云重叠,初始的单一势阱变为不对称的双势阱,电子转移生成摩擦电信号。在这种背景下,改进的热电子发射模型表明,T-TENG的输出电压随着温度的升高而降低,这有助于温度感知,因为温度升高导致摩擦电荷的发射。
图3压力传感 温度影响摩擦电信号的大小,因此开发了T-TENG以响应温度刺激。图4a展示了T-TENG的结构和工作机制。在热刺激下,摩擦电材料的温度升高,导致存储电荷的无序耗散。该现象通过高温下的电子云模型进一步解释(图4b)。当两种材料接触时,电子云重叠,初始的单一势阱变为不对称的双势阱,电子转移生成摩擦电信号。在这种背景下,改进的热电子发射模型表明,T-TENG的输出电压随着温度的升高而降低,这有助于温度感知,因为温度升高导致摩擦电荷的发射。 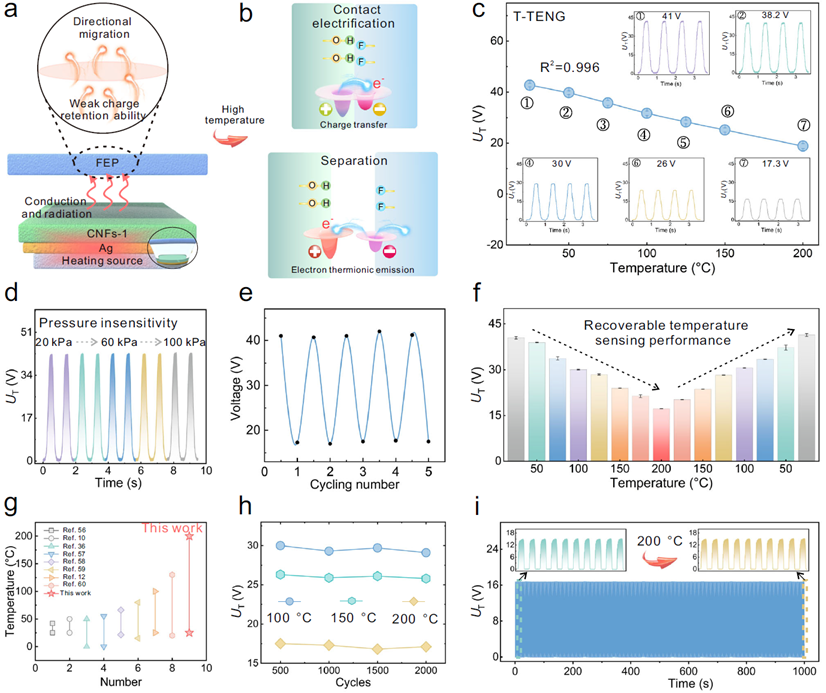 图4 温度传感 在实际应用中,需要同时独立地检测多个刺激。多个耦合刺激之间的信号干扰会影响传感器的准确性,这要求传感器具有低交叉干扰和稳定的解耦能力(图5a)。讨论了在固定压力和不同温度下,多模态摩擦电传感器的信号干扰(图5b)。与理论结相比,P-TENG和T-TENG因温度干扰产生的交叉耦合误差分别小于0.4%和3.2%,表明压力和温度之间具有低交叉灵敏度。
图4 温度传感 在实际应用中,需要同时独立地检测多个刺激。多个耦合刺激之间的信号干扰会影响传感器的准确性,这要求传感器具有低交叉干扰和稳定的解耦能力(图5a)。讨论了在固定压力和不同温度下,多模态摩擦电传感器的信号干扰(图5b)。与理论结相比,P-TENG和T-TENG因温度干扰产生的交叉耦合误差分别小于0.4%和3.2%,表明压力和温度之间具有低交叉灵敏度。 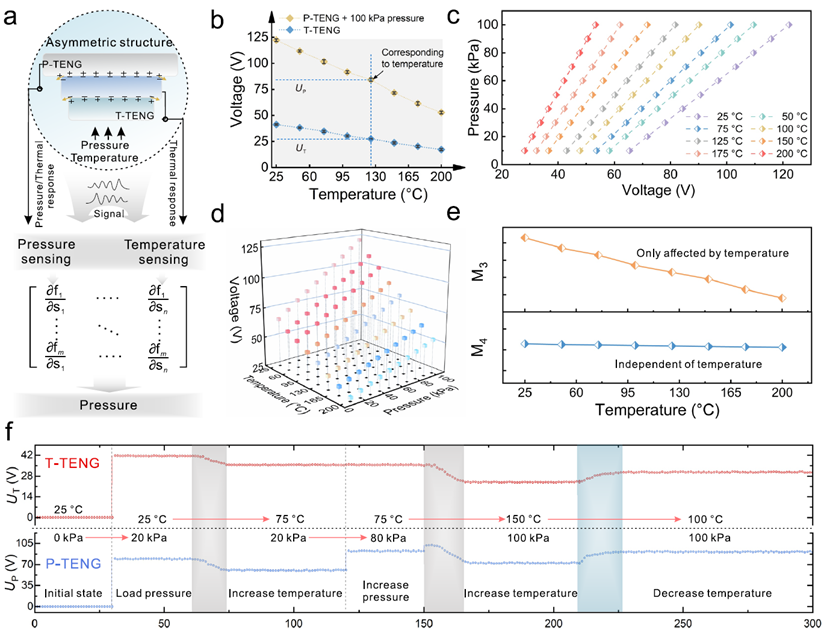 图5 单一摩擦电传感器中的压力-温度解耦和双模态感知 机器人技术利用多模态传感器并结合人工智能技术,解锁跨学科领域的智能数据分析,实现复杂的手势和物体识别。因此,为了更好地展示触觉传感器在实际场景中的压力/温度响应能力,传感器被集成到机器人手的五个指尖中,形成一个智能触觉系统,用于识别未知物体(图6a)。
图5 单一摩擦电传感器中的压力-温度解耦和双模态感知 机器人技术利用多模态传感器并结合人工智能技术,解锁跨学科领域的智能数据分析,实现复杂的手势和物体识别。因此,为了更好地展示触觉传感器在实际场景中的压力/温度响应能力,传感器被集成到机器人手的五个指尖中,形成一个智能触觉系统,用于识别未知物体(图6a)。 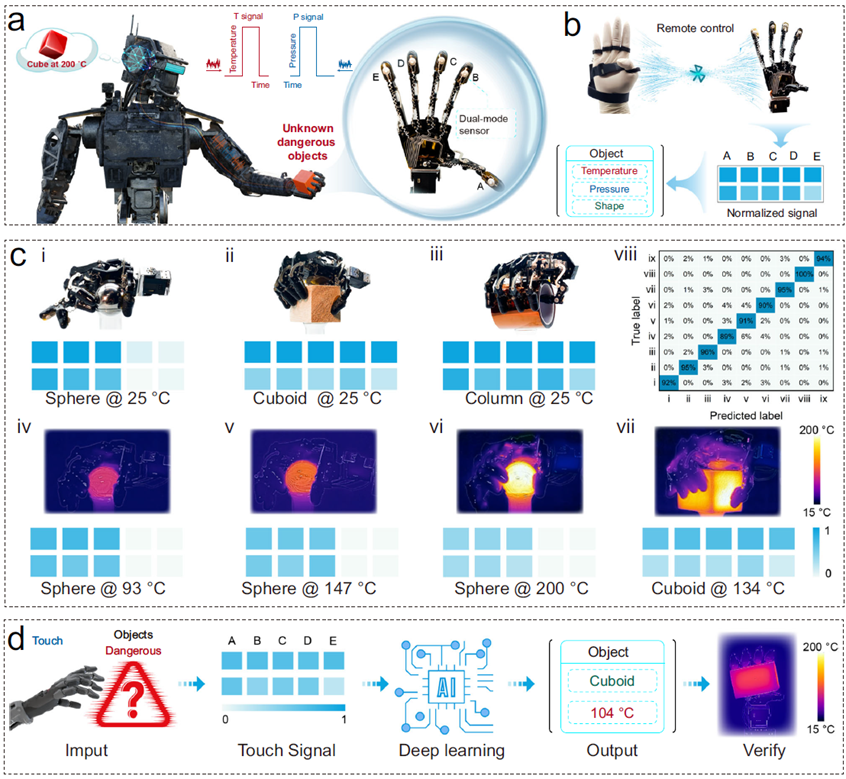 图6 高温环境中的触觉感知 结论与展望 该研究展示了一种摩擦电触觉传感器,能够响应超出人类触觉感知范围的压力/温度,适用于极端环境。该触觉传感器基于摩擦电纳米发电机技术,采用稳定的纤维素摩擦电材料在高温下工作,并设计了一个不对称结构,可以独立输出双信号,实现高温环境中的多重刺激响应。该设备实现了无需外部电源的人机交互的实时数字响应。然而,这项工作仍处于初步研究阶段,通过跨学科集成(如设计隔热和阻燃材料、扩展无线插件等),还可以在极端环境中实现更复杂的应用。该传感器的可调节尺寸特性有助于规模化集成。结合机器学习技术,能够进一步精确识别高温环境中物体的形状和温度。所提出的自供电多模态传感系统为发展前沿技术提供了设计思路。
图6 高温环境中的触觉感知 结论与展望 该研究展示了一种摩擦电触觉传感器,能够响应超出人类触觉感知范围的压力/温度,适用于极端环境。该触觉传感器基于摩擦电纳米发电机技术,采用稳定的纤维素摩擦电材料在高温下工作,并设计了一个不对称结构,可以独立输出双信号,实现高温环境中的多重刺激响应。该设备实现了无需外部电源的人机交互的实时数字响应。然而,这项工作仍处于初步研究阶段,通过跨学科集成(如设计隔热和阻燃材料、扩展无线插件等),还可以在极端环境中实现更复杂的应用。该传感器的可调节尺寸特性有助于规模化集成。结合机器学习技术,能够进一步精确识别高温环境中物体的形状和温度。所提出的自供电多模态传感系统为发展前沿技术提供了设计思路。
论 文 信 息
Title:Triboelectric tactile sensor for pressure and temperature sensing in high-temperature applications Authors: Yanhua Liu, Jinlong Wang, Tao Liu, Zhiting Wei, Bin Luo, Mingchao Chi, Song Zhang, Chenchen Cai, Cong Gao, Tong Zhao, Shuangfei Wang & Shuangxi Nie Journal: Nature Communications DOI: https://doi.org/10.1038/s41467-024-55771-0
审核编辑 黄宇
-
广西大学:仿生超疏水纤维素摩擦电材料用于高温传感2025-09-08 5084
-
蓝宝石光纤传感,广西大学研发!2024-07-30 1125
-
高温压力传感器的主要工作原理2023-06-18 5183
-
广西大学:研发可穿戴摩擦电视觉传感器用于触觉感知2022-12-13 2274
-
广西大学:研发可穿戴的摩擦电触觉传感器2022-11-29 2366
-
高温熔体压力传感器的工作原理是什么?2020-03-17 2642
-
高温熔体压力传感器的使用和维护2018-12-04 2451
-
传感器在透析仪中的应用:结合温度管理与压力传感2018-11-13 1270
-
基于高温的微型压力传感器设计方案2018-11-12 2242
-
波纹膜片对高温压力传感器性能影响2018-02-02 1658
-
基于传感器的触觉设计应用2017-09-14 1206
-
高温型钛/硅压力传感器2013-07-03 3298
-
[分享][下载]美国PPS触觉传感器有限公司2009-12-16 4251
全部0条评论

快来发表一下你的评论吧 !
