

RDK赋能“蚁界天敌”:AI巡逻兵24小时在线!红火蚁无处遁形!
描述
红火蚁,农业的“头号反派”,不仅咬人,还会啃电线、引发火灾,连国家都高度重视它的防治。可现有的除蚁手段精准度不高、效率低,根本赶不上红火蚁的扩张速度。
于是,“基于AI视觉和自主探索导航的红火蚁防治机器人”登场!它能自主巡逻、精准识别、智能除蚁,像红火蚁的天敌一样持续对抗,让蚁患问题大大减少。目标很简单:让红火蚁少折腾,让农田、社区更安心!————深圳大学:蚁嵌是蚁嵌,蟹仔是蟹仔团队。
一、创新与特色
1.1 作品特色
这款AI红火蚁防治机器人集视觉识别、自主导航、智能投放于一身,像个专业的“除蚁特工”,精准、高效、稳准狠!
- 火眼金睛 :高性能摄像头+AI视觉,精准锁定红火蚁巢穴,探测又快又准!
- 智能导航 :自主规划路线,LIDAR+IMU传感器加持,无论是农田、草地还是崎岖地形,轻松穿越!
- 机械臂投放 :多自由度机械臂+高精度舵机,精准投放饵剂,让红火蚁“无处可逃”。
- 履带底盘 ️:避震+月球车结构,翻山越岭不在话下,颠簸地形稳得住!
- 云端大脑 ☁️:数据实时上传分析,研究红火蚁动向,优化防治策略,灭蚁更科学!
1.2 创新点
- 悬挂避震系统 :8个避震器,保证机器人“跑得稳,不伤身”。
- 月球车级底盘 :前端采用“被动摇臂”结构,崎岖路面不减速,稳健行驶无压力。
- 机械臂+负压吸泵 :精准吸取饵剂,投放时闭环控制,确保百发百中。
- 智能履带控制 ️:硬件软件高度协同,精准巡航,自动调整路线直奔蚁巢。
- YOLO-SRC改良算法 :专门优化移动识别,小小蚁巢也逃不过它的眼睛!
- 饵剂精准投放 :智能控制饵剂用量,确保灭杀率的同时不浪费,每一颗饵剂都物尽其用
二、功能
2.1 功能与特性
- 智能巡航 ️:基于ROS系统,小车可按照用户设定的全局航点,实时构建3D点云地图,自主探索、避障、识别红火蚁巢穴。
- 精准灭杀 :机器人靠近蚁巢后,机械臂+负压吸泵吸取饵剂,利用视觉识别进行矫正,确保饵剂精准投放,不浪费、不误伤。
- 生态友好 :饵剂投放量智能控制,既提高灭杀效率,又避免生态污染,不伤害本地蚁种。
- 远程监控 :巡逻路径和灭杀记录可在Web端 & App端可视化,随时掌控灭蚁进度!
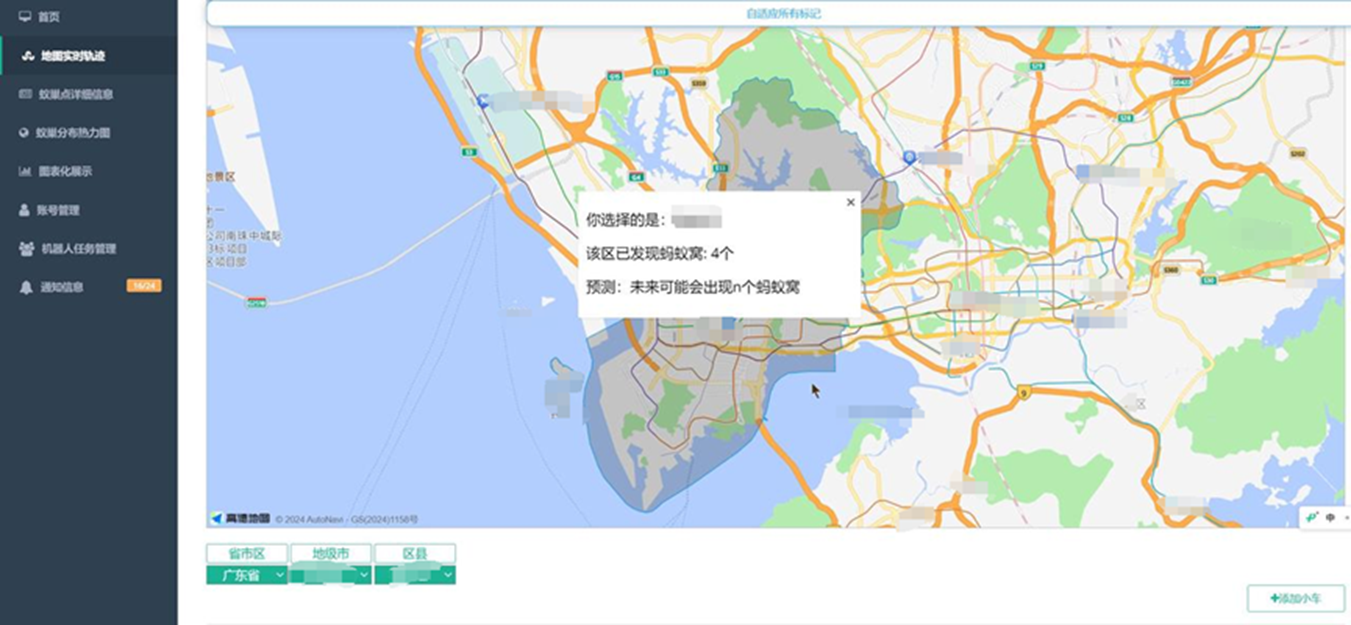
- 智能预测 :云端大模型根据现有数据预测未搜索区域的蚁巢分布,为机器人规划搜索路线,高效清除隐患。
2.2 设计流程
首先,确定项目背景,强调红火蚁的危害和现有防治手段的不足。然后,进行需求分析,明确人工巡查和市场产品的局限性。接着,提出机器人设计方案,包括履带底盘、机械臂和电控系统。履带底盘采用避震器和月球车机械结构,提升越野性能;机械臂通过高精度舵机和视觉识别实现精确饵剂投放。最后,机器人通过自主导航和云端数据整合,实现高效红火蚁巢穴探测和灭杀,达到智能化防治的目标。
三、系统实现
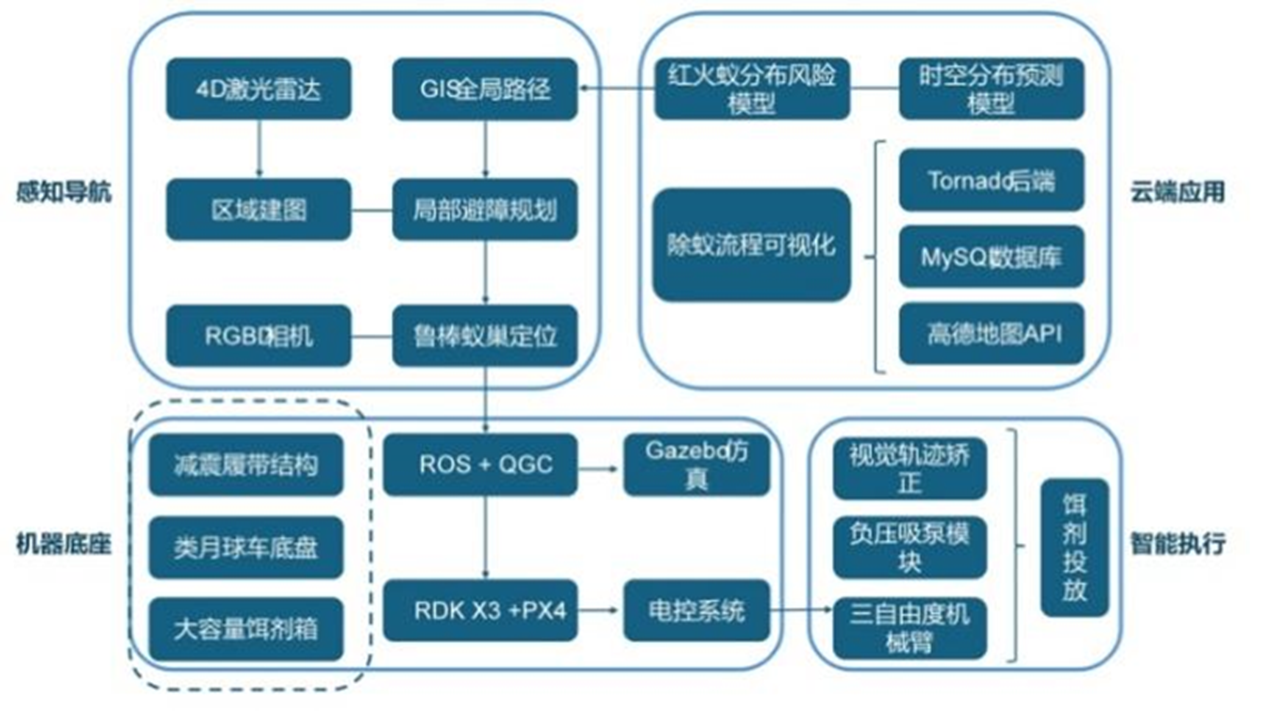
3.1总览
小车可沿预定巡航路线精准灭杀红火蚁巢穴,也可在划定的GPS区域内优先覆盖疫情高风险地区进行搜索灭杀。
灭杀过程:小车依靠机械底座靠近蚁巢,机械臂配合负压吸泵吸取饵剂,并通过视觉识别和电控系统精准投放,确保灭杀效率,同时降低生态污染,避免对本地蚁种造成破坏。
小车的巡视路径与灭杀数据将通过Web端和App端可视化展示,同时云端预测模型基于已有蚁巢信息,推测未搜索区域的蚁巢分布,引导小车优化搜索策略。
小车采用“生物防治”理念,打造红火蚁的“机械天敌”,依靠高识别率、高效搜索和云端数据整合,实现对红火蚁种群的长期控制,降低其对生态与经济的影响。
3.2 硬件系统介绍
3.2.1 硬件整体介绍
电控系统包括履带底盘电机的控制与机械臂的控制,执行红火蚁灭杀任务时,上位机i5主机发送速度信息到下位机,下位机驱动履带小车机械底座靠近蚁巢,控制机械臂和末端负压吸泵模块吸取饵剂,并通过视觉识别矫正使机械臂置于蚁巢上方,而后投放饵剂。
3.2.2 机械设计介绍
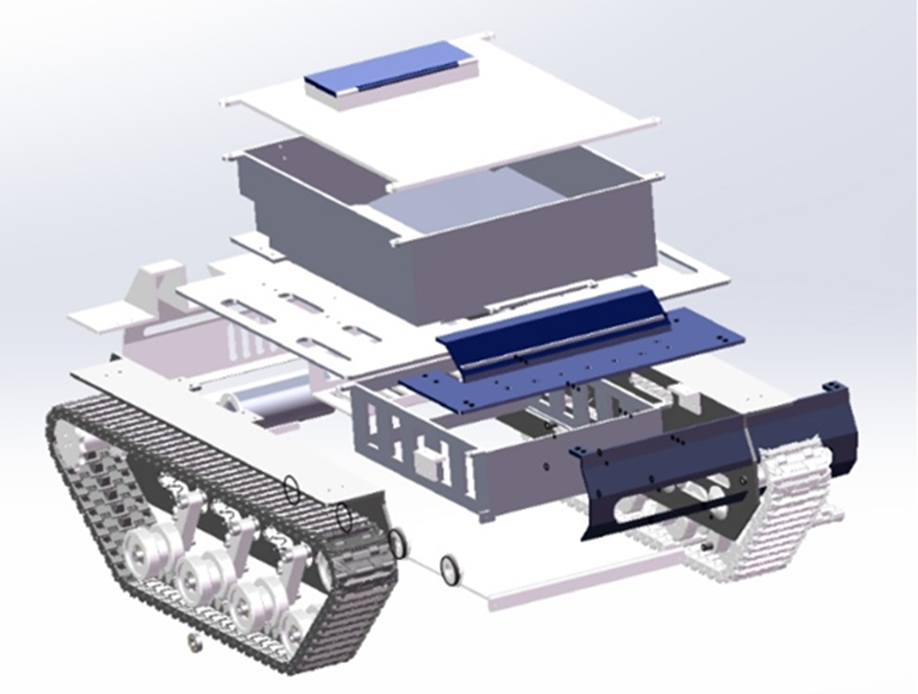
A.机器底座
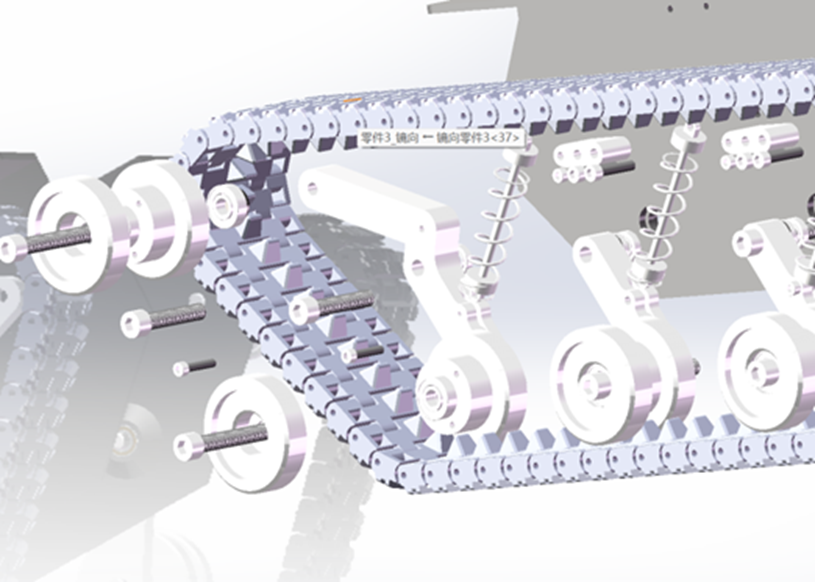
本文的红火蚁防治机器人采用履带结构的月球车动力结构,通过电机带动履带驱动车体移动。
a)避震器系统
我们在底盘上增加了8个避震器,旨在提升车辆的越野性能,并保护车上的设备不受颠簸影响。当遇到不平稳的地面时,从动轮受到向上的压力,被迫向上移动,并让车身晃动,而避震器此时就可以给从动轮提供向下的压力,使从动轮与履带紧密贴合,履带与地面紧密接触,并且这些避震器能够有效地吸收地面震动,减少车身晃动,提供更稳定的行驶体验。
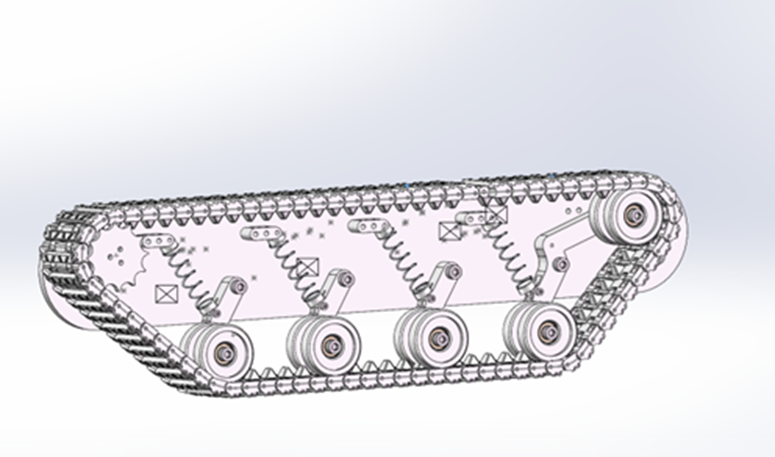
b)类似月球车底盘机械结构
底盘前部两个从动轮之间采用了类似于月球车的机械结构,即“被动摇臂”型底盘。摇臂固定在连杆构成的悬架上,增强了整体的悬挂性能,使车辆在不平地形中能够更灵活地行驶。在遇到碎石地带时,底盘前部会有一定的自主调整性,在允许的范围内,可以改变履带与地面的接触面积,从而增加小车翻越障碍的能力。
c)饵料箱主体设计
采用诱饵箱作为底盘的主体结构,将变压器和电池放置在箱体下方,以节省空间并保护其免受外部损坏。箱体设计采用了两边高中间低的设计,使诱饵粉末能够集中到中间位置,便于收集和使用。我们设计了有效的固定机制,确保大电池和大电机能够牢固地固定在底盘上,不会因为颠簸而移位或损坏。
d)强化越野性能的履带设计
我们针对地形复杂的野外环境,对履带进行了优化设计,使其更好地适应各种地形。这包括增加了履带的宽度和厚度,以增加对不平地形的稳定性和抓地力,从而减少小车的侧翻概率,提升车辆的越野爬坡能力。
B.机械臂设计
机械臂运动系统是由三个总线舵机、机械外壳组成三自由度机械臂,我们采用了连杆和集中舵机的方式来驱动机械臂,这种方式可以极大的减轻机械臂末端的压力负荷,并且将重力全部集中在小车底盘上,使得小车重心更稳。机械臂旁会有一个类似卡扣的结构将输送固体颗粒的软管给扣紧,在深度相机旁会有一个吸泵,将固体颗粒吸上来并放射出去,深度相机对红火蚁巢穴进行识别,一旦识别出红火蚁,上位机通过串口发送转动位置信息给到总线舵机调试板,总线舵机调试板将接收的信息转化为 PWM 波驱动舵机进行精准的角度转动,对准巢穴后,打开吸泵吸起毒药,电机关闭时仓门打开,农药落下,杀死红火蚁。
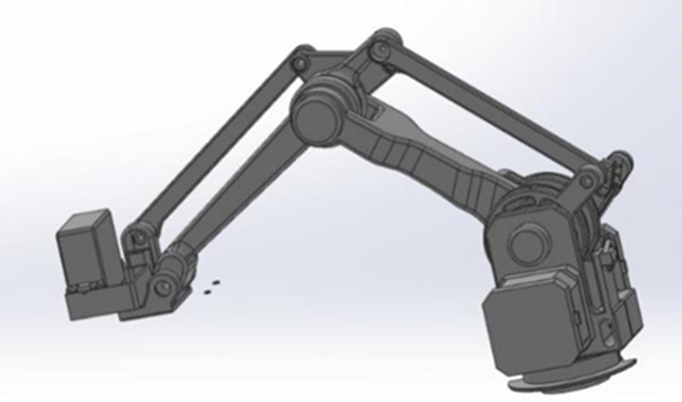
机械臂大体分为三部分,分别是机械臂底部运动模块,大臂运动模块,小臂运动模块。
a)机械臂底部运动模块:
机械臂整个压在机械臂底盘固定件,使底部齿轮完美配合,移动盘在边边有三个螺纹孔,这三个螺纹孔与螺杆式万向球配合,他们的位置形成三角形,有效地避免机械臂会因重心不稳而倾斜。在舵机的作用下,齿轮会带动从动齿轮旋转,移动盘与舵机在齿轮的带动下进行旋转,移动盘中间会有一个轴承,可以极大地减少摩擦并旋转得更加顺利。
b)大臂运动模块:
一对大臂配合,中间的圆柱孔可以让红火蚁饵料输送管嵌进去,从而避免输送管暴露和损坏,舵机与大臂配合,可以控制机械臂大体的位置。
c)小臂运动模块:
一对小臂配合,中间的圆柱孔可以让红火蚁饵料输送管嵌进去,从而避免输送管暴露和损坏,舵机与曲柄相连,曲柄与连杆相配合,连杆与小臂相配合,舵机运动,可以使曲柄控制连杆,进而让连杆精准控制小臂的位置,使机械臂末端的达到目标点。
图9 机械臂设计拆解图
3.2.3 电路各模块介绍
下位机采用STM32F407VET6核心板。我们基于STM32F407VET6的拓展板,集成了继电器模块。
拓展板的功能主要是用来固定线材,由于在封装库中没有找到合适的型号,所以利用了其他端口来替代,但是焊接的时候依旧是主要采用P2.54的端坐
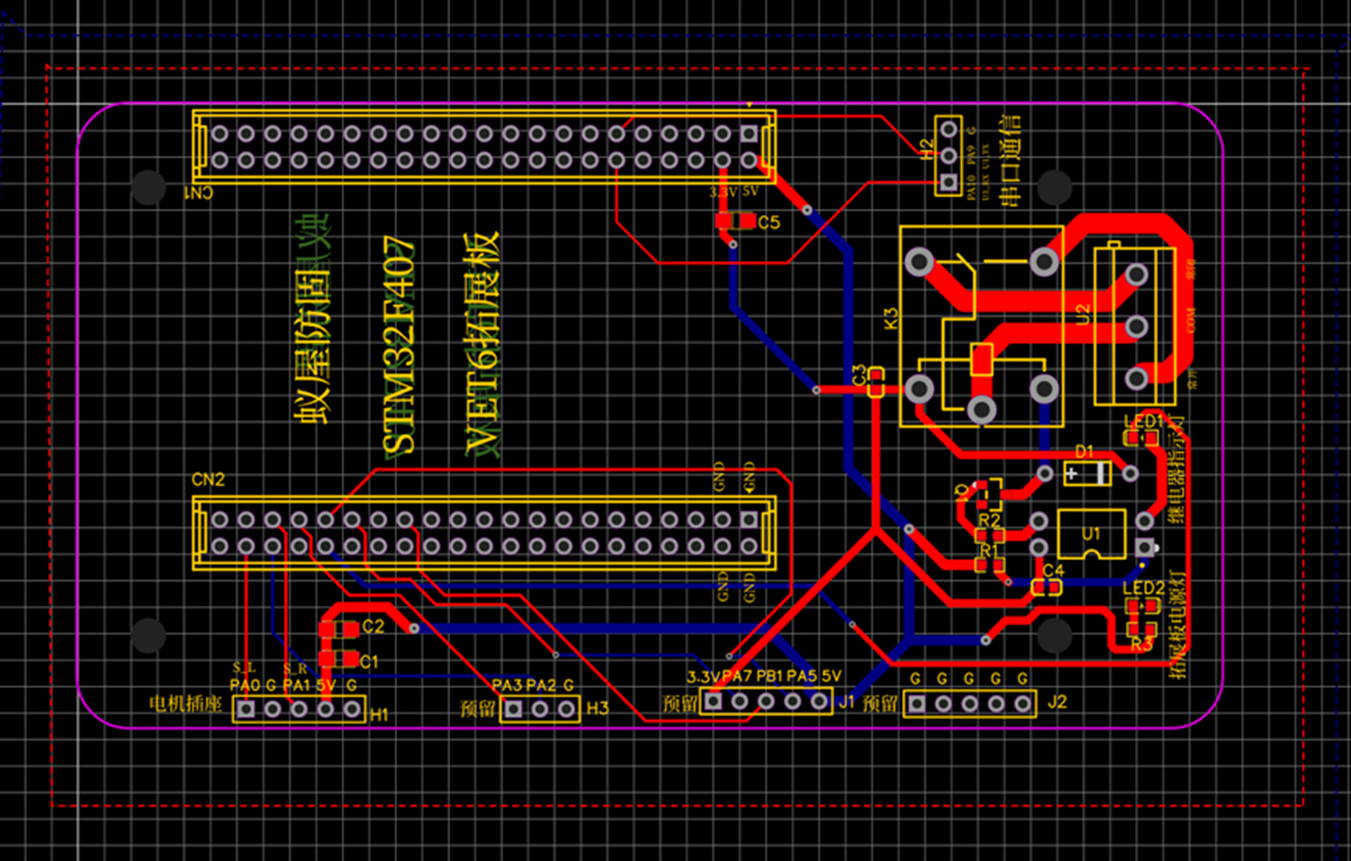
另外的硬件设备:i5主机一台(主要通过USB转串口模块通过串口与下位机通信),一块RDKx3开发板。
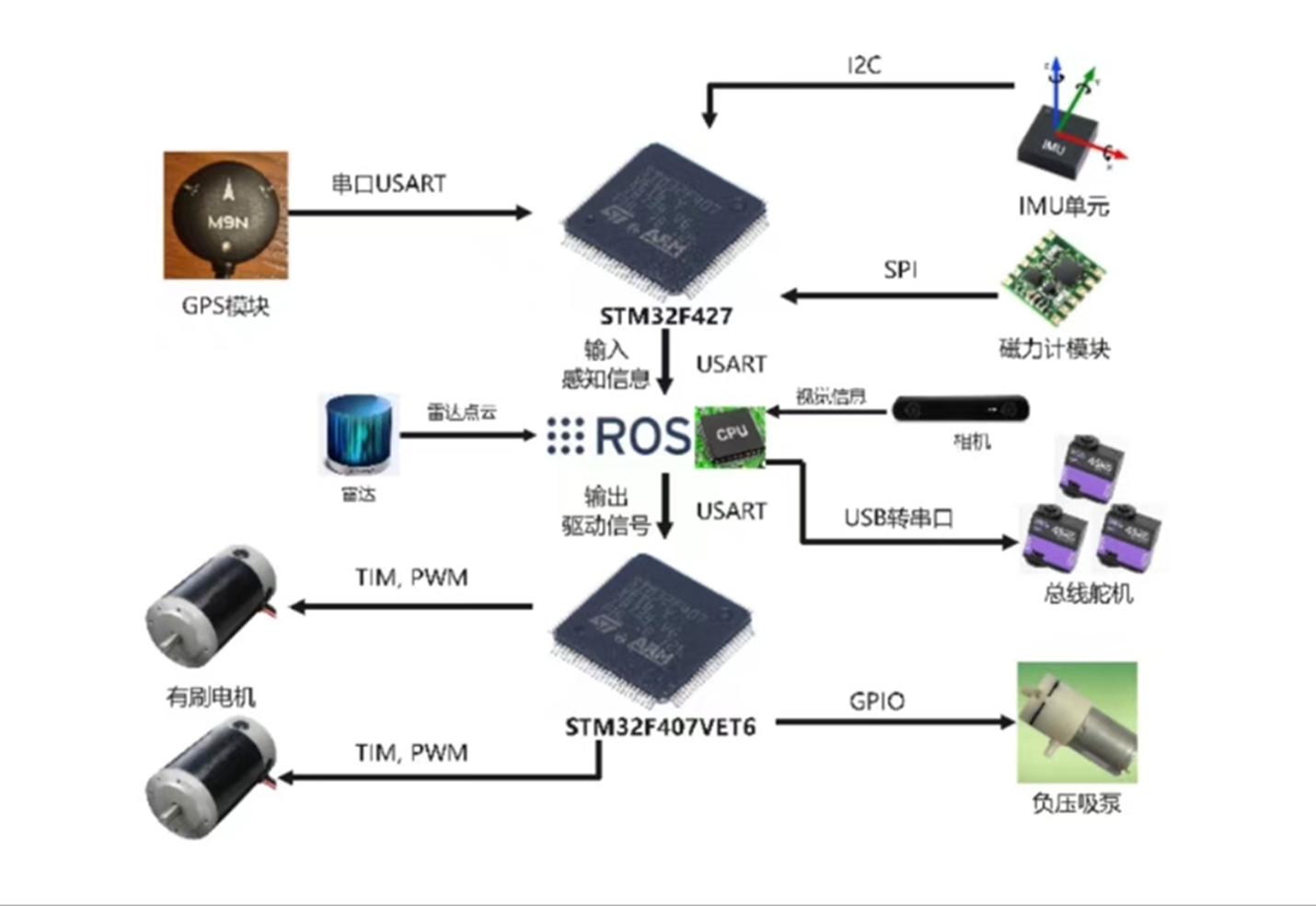
我们以二块STM32为核心的双U系统架构,分别负责感知与关节驱动,PX4模块采用STM32F427 Cortex M4为核心处理器,主要负责感知模块的驱动与数据的运算,并将处理好的信息上传CPU处理,STM32F407VET6自定义模块自主打板,主要负责驱动动力关节。
3.3 导航感知系统介绍
3.3.1整体介绍
导航感知由本地的自主探索导航、手动规划的大致巡航航点和范围划定的风险驱动导航融合构成。
3.3.2 导航感知各模块介绍(简化版)
A. SLAM
SLAM(同步定位与地图构建)用于让设备在未知环境中同时进行自身定位与环境地图构建。它通过相机、激光雷达、IMU等传感器收集环境信息,并利用算法融合这些数据,确定设备位置并生成地图。
LOAM 是经典的激光 SLAM 算法,主要包含点云特征提取、激光里程计、地图构建三个模块。它通过提取点云的边缘点和平面点进行匹配,实现高效定位与建图。在此基础上,LEGO-LOAM 通过地面点分割减少计算量,并引入闭环模块降低长期漂移。
由于 LOAM 依赖激光雷达扫描,长时间运行后易产生漂移,因此多传感器融合 SLAM 成为趋势。IMU 可提供高频率的角速度与加速度数据,结合 GPS 进行融合,提高系统鲁棒性。
主流融合方式有 松耦合(分别处理 IMU 和 LiDAR 数据后融合)和 紧耦合(直接融合 LiDAR 原始特征点与 IMU 数据)。LIO-SAM 采用紧耦合策略,通过 IMU 预积分校正激光点云畸变,并结合 GPS 与闭环检测,最终实现高精度、低漂移的鲁棒定位与建图。
为了更好地实现定位与建图效果,我们将ALOAM、LeGO-LOAM与LIO-SAM三种主流SLAM算法进行对比并评估性能。经过实验,我们发现LIO-SAM算法与前两者相比,细节更加丰富,同时建图范围更广。ALOAM算法在X轴上拟合较好,但是在Y轴和Z轴上误差较大。LeGO-LOAM算法在X轴和Y轴上拟合较好,但是在Z轴上严重偏离真实轨迹。LIO-SAM算法则在三个方向上拟合效果都优于其他两种算法,不过波动较大,有可能是受到IMU标定影响,但是曲线趋势方向大致正确。
最终我们决定采用LIO-SAM算法作为机器人SLAM算法。
B. FAR Planner 自主导航框架(简化版)
FAR (Fast, Attemptable Route) Planner 是一种实时路径规划算法,可根据传感器数据动态提取环境几何特征,并构建 Visibility Graph 进行导航。它无需预先构建地图,可在 1-2ms 内完成 300m 范围的全局路径规划与动态调整。
算法流程:
- 环境建模:将点云转换为二进制图像,并使用平均滤波生成模糊图像。
- 特征提取:从模糊图像中提取多边形轮廓,并与传感器数据匹配。
- 动态避障:通过多帧数据检测行人、车辆等动态障碍物,并实时更新 V-Graph,当障碍物移开时恢复原有路径连接。
- 未知环境探索:在无先验地图的环境中,FAR Planner 可基于当前信息生成多条可行路径尝试,并持续优化导航路线。
这一框架使小车能在复杂环境下进行高效、自主的动态导航。
C. 基于GIS地图的航点规划(简化版)
为提升红火蚁疫情防治效率,本系统基于 GIS地图路径规划 进行航点优化。云端整合 小车巡视路径、红火蚁巢穴信息、历史疫情数据 等多源数据,利用预测模型估算未搜寻区域的蚁巢分布概率。
航点规划核心算法 综合考虑 已知巡视路径、蚁巢分布、风险等级、用户优先级 等因素,并结合实时数据 动态调整最优航点。云端生成航点后,通过 物联网 传输至小车,小车接收导航指令后自主巡视。
巡视过程中,小车 实时上传路径、蚁巢信息 等数据,云端系统分析后即时调整航点,以适应环境变化,确保巡视策略最优
D. YOLO-SRC视觉目标定位算法(简化版)
在 过曝、遮挡、运动模糊 等干扰严重的户外环境中,蚁巢检测面临挑战。我们开发的 YOLO-SRC 算法基于 YOLOv4 改进,结合 合成噪声数据 与 对比学习一致性对齐 训练方法,提高了蚁巢检测的鲁棒性与准确性。
核心优化点:
- 特征提取网络优化 —— 增强微小目标特征捕捉,提高识别精度。
- 多尺度特征融合 —— 融合不同层级特征,提升检测性能。
- 数据增强与对齐训练 —— 通过 JSD散度损失 使模型在不同噪声域下预测对齐,增强抗干扰能力。
目标定位流程:
- RGBD双目相机 采集图像,YOLO-SRC输出目标检测框。
- 对齐Depth图,利用均值滤波去噪,获取目标中心深度。
- 矩阵映射 将像素坐标转换为 机器人坐标系,实现 蚁巢空间位姿估计。
3.4.2 软件各模块介绍
后端设计介绍:
使用 Tornado 框架处理高并发和长连接请求,负责数据交互和 API 接口提供,功能模块包括:
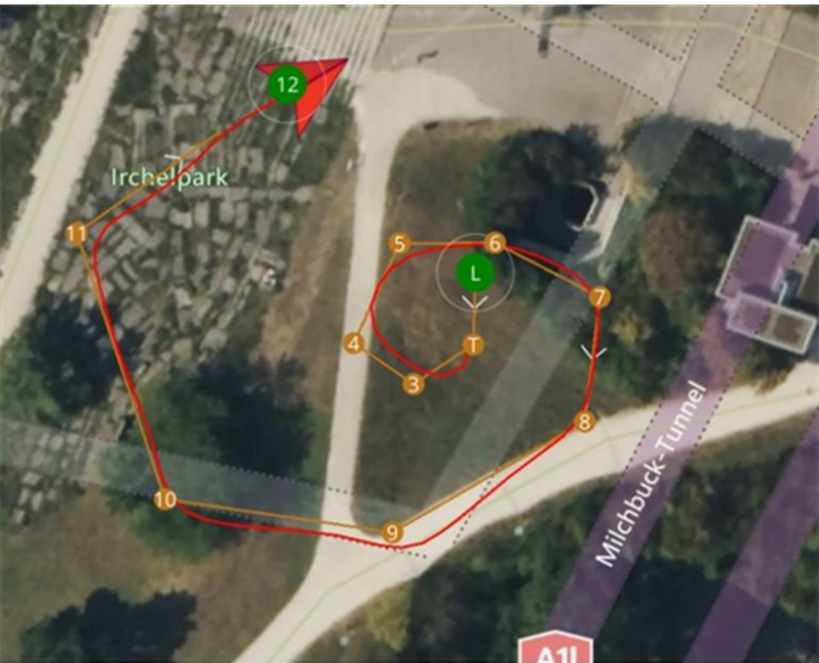
- 轨迹展示处理器:读取机器人运行轨迹数据(经纬度),通过高德地图API在前端展示。
- 标记点处理器:处理红火蚁巢标记点的操作,包括添加、更新和获取标记点数据。
- 区域选择处理器:查询并返回用户选择区域内的红火蚁巢数量。
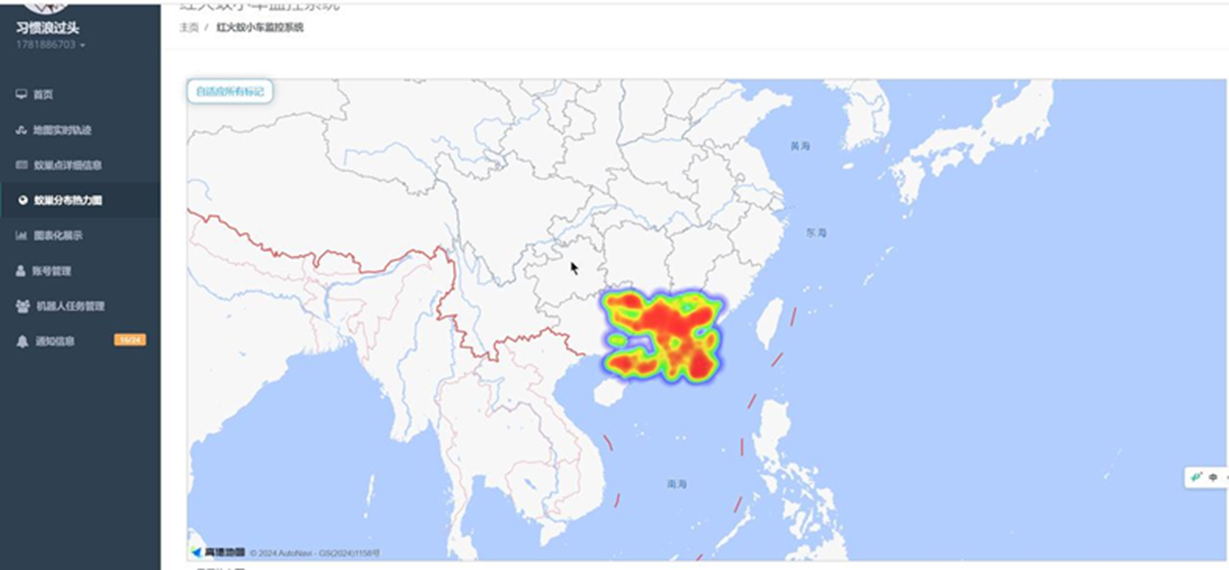
- 热力图处理器:返回红火蚁巢位置数据,前端生成热力图展示。
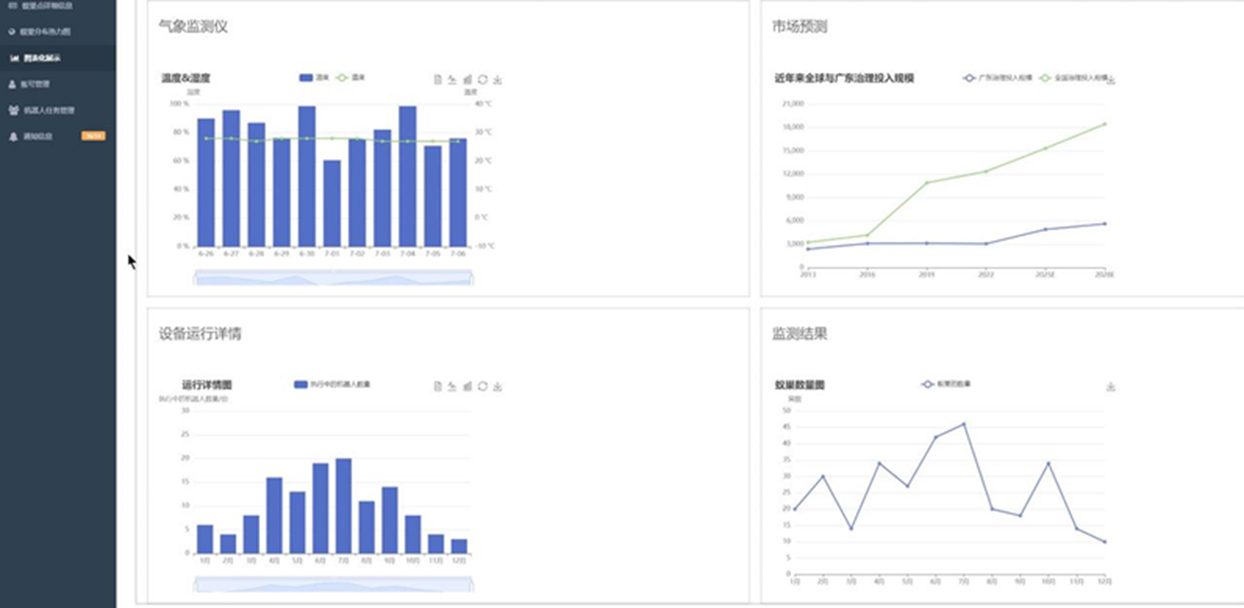
- 图表可视化处理器:处理天气、机器人状态、温湿度及蚁巢统计数据,生成图表进行展示。
- 登录登出功能及拦截器:负责用户认证、会话管理和权限控制,确保系统安全。
前端设计介绍:
前端使用 高德地图API 实现机器人轨迹、红火蚁巢标记和热力图的可视化,功能模块包括:
- 轨迹展示:在高德地图上展示机器人轨迹,通过经纬度描点成线,并提供轨迹的显示与隐藏控制功能。
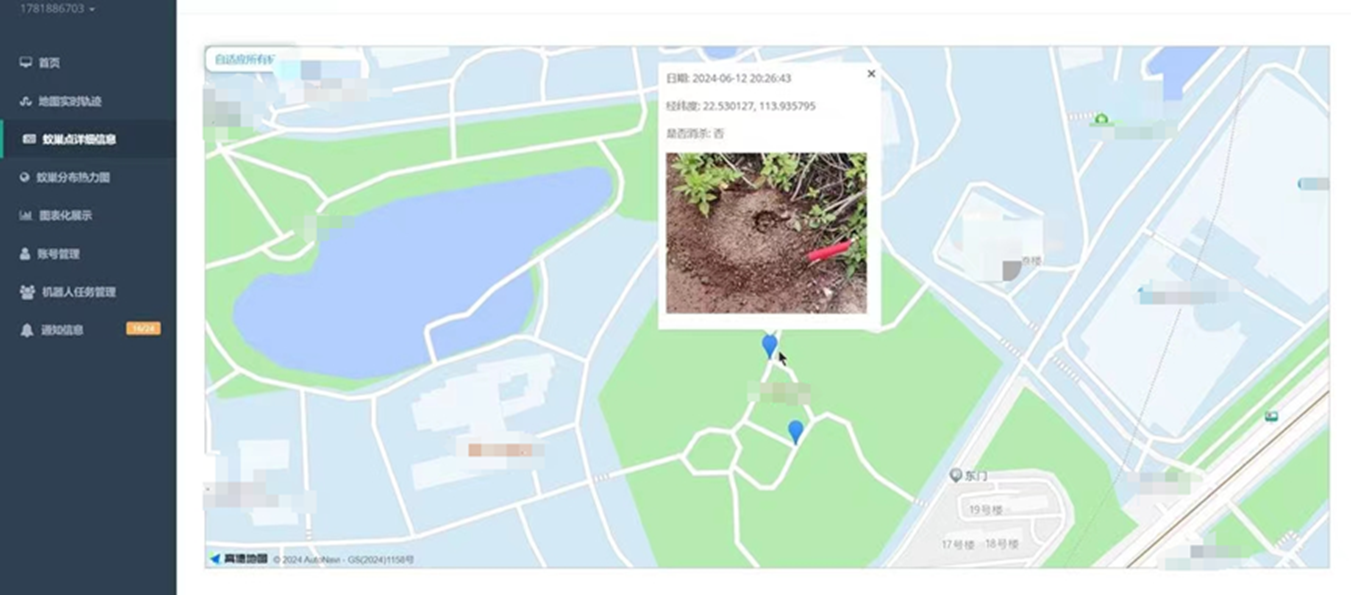
- 标记点展示:在地图上标记红火蚁巢位置,点击标记点显示详细信息(照片、经纬度、发现时间等)。
- 区域选择:用户可以选择特定区域,系统查询该区域内所有红火蚁巢数量,并在地图上进行展示。
- 热力图:生成红火蚁巢分布的热力图,显示蚁巢密位置分布以及密度情况,蚁巢越密集,颜色越深。
- 图表可视化:展示未来天气预报、机器人运行状态、温湿度及红火蚁巢统计信息的图表。
五、性能一览
1 部分机械结构采用PLA材料打印,部分机械结构采用pla-CF材料打印。打印密度均大于80%。
2. 杀蚁饵料载重达40kg
3 机器人巡航续航达4小时
4 最高速度1m/s
5 视觉识别精准,高达92%以上
指导老师:张博

深圳大学机电与控制工程学院研究员,博士生导师,深圳市高层次人才,现任人工智能与数字经济广东省实验室(深圳)主任助理,深圳市自主无人系统与智能操作联合实验室主任。主要从事的科研方向包括:空间智能、自主智能、具身智能与智能无人系统及其应用。历任深圳大学机电与控制工程学院自动化系主任,学科办公室副主任,机器人工程专业负责人。兼任《Energy Review》青年编辑,TIE、TIC、ISA、IET、Sensors、Journal of the Franklin Institute等期刊审稿人。作为项目负责人主持国家级项目8项,省市级项目3项。以第一/通讯作者发表论文20余篇,其中TOP期刊论文4篇,出版专著 1 部,授权专利20余项。
全部0条评论

快来发表一下你的评论吧 !
