

智科特多模态传感器上装——助力你的科研、应用工作!
描述
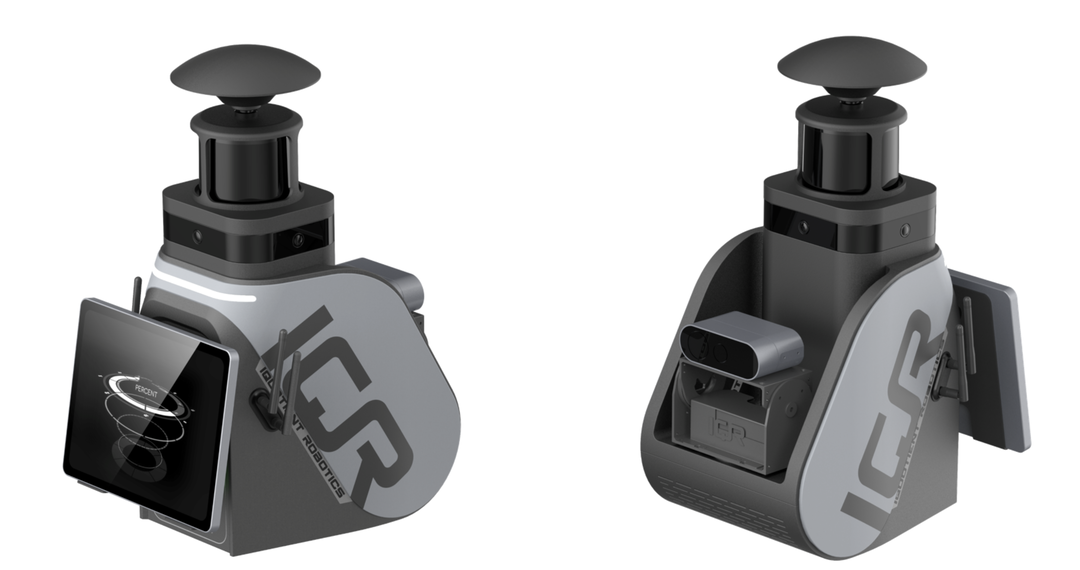
 智科特多模态传感器上装为移动机器人开发者打造零门槛、高精度、全融合、高性价比的环境感知解决方案,适配市场主流移动机器人产品,让用户能迅速开展科研、应用工作。
智科特多模态传感器上装为移动机器人开发者打造零门槛、高精度、全融合、高性价比的环境感知解决方案,适配市场主流移动机器人产品,让用户能迅速开展科研、应用工作。
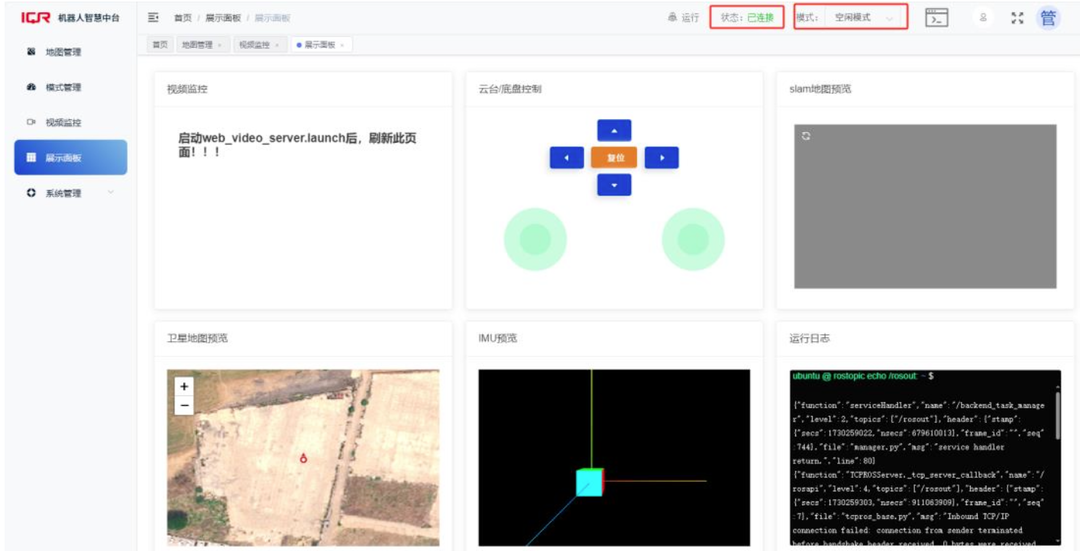
对于非机器人领域用户,我们开发了完整的机器人中台软件,用户可以在不操作ROS的情况下,使用机器人完成领域应用。
 产品特点:
产品特点:
·操作简单,易用性强
·提供整体的ROS包与完整URDF模型,能够实现建图、导航、避障等示例代码
·高性能传感器适配多数科研应用场景,软件持续迭代
一、零门槛操作,全场景易用性设计
·即插即用,快速部署
产品采用标准化接口设计(USB3.0/GMSL2/网口/HDMI),兼容市场主流移动机器人底盘,用户仅需物理连接即可完成硬件适配,无需复杂调试。机器人控制器提供工业级稳定算力,支持户外高低温、震动等严苛环境。支持SLAM建图、路径规划、多机协作等场景的默认功能,用户无需配置软件。
·非机器人领域用户友好
通过机器人中台软件用户无需ROS编程基础即可实现功能调用。
集成Yolo v11目标检测、DeepSeek 8B,可直接部署应用。
IQR
二、全栈开发支持,科研与工程无缝衔接
·开箱即用的ROS开发生态
提供完整ROSnoetic功能包,涵盖激光雷达点云处理、多传感器标定、导航避障算法;
科研版搭载NVIDIA OrinNX,预装CUDA,为深度学习算法提供高达100TOPS的算力支持。
·多模态数据融合框架
支持多线激光雷达、云台深度视觉、差分GPS、IMU的系统集成,构建完成的传感器体系。

IQR
三、高性价比行业方案
对比传统开发模式,智科特方案可缩短80%环境感知系统搭建周期;
科研用户:直接调用预装算法验证理论,节省硬件调试时间;
项目应用用户:通过中台软件快速适既有机器人,降低单项目机器人使用与部署成本。
四、系列产品
 |  | |
| 应用版 | 科研版 | |
| 主控制器 | 车规级控制器AD10(orin内核) | Nvidia Orin NX |
| 主要硬件配置 | 64线/32线激光、差分GPS、IMU、云台深度视觉系统 | |
| 软件系统 | Ubuntu 20.04、ROS noetic、Python 3.8 | |
| 预装应用 | Yolo v11、deepseek 8B、机器人定位导航 多机系统、机器人中台v1.1 | |
| 标准接口 | USB3.0、网口、HDMI、机器人通信和供电口,应用版上装具备GMSL2接口 | |
-
ADPD4200 多模态传感器前端:功能、应用与设计要点2026-03-27 279
-
革新科研智造,引领材料未来——高通量智能科研制备工作站2025-09-27 2617
-
变压器振动温度传感器的多模态监测技术解析与应用展望2025-09-01 943
-
如何利用模态分析设计优质的振动传感器外壳2022-08-23 2860
-
智科特移动机器人传感器上装与中台介绍2022-05-13 2104
-
磁阻式转速传感器的工作原理2021-08-10 28436
-
ADPD4000/ADPD4001:多模态传感器端数据Sheet2021-05-11 880
-
传感器信号调节器中抗混淆滤波器的工作情况2021-04-06 1911
-
如何利用信号调节器的抗混淆滤波器来实现混合信号多模态传感器调节2020-04-22 2629
-
抗混淆滤波器怎么实现混合信号和多模态传感器调节?2020-04-21 2588
-
labview 模态分析2016-06-24 6590
-
可以“吃”的传感器,你听过吗?2015-11-24 3573
全部0条评论

快来发表一下你的评论吧 !
