

移植RT-Thread到灵动微MM32F5265开发板教程
描述
本文转载于极术社区
作者:曾是一颗薏米
前言
近期,笔者有幸获得灵动微 MM32F5265 开发板的体验资格。MM32F5260 搭载了 arm china "Star-MC1 内核"处理器,拥有高性能,主打家电和工业等高可靠性应用领域。 总结一下,有以下亮点:
本土团队打造,完全自主可控,采用全国产化供应链;
基于 Armv8-M 架构,带有 L1 I-Cache & D-Cache,对比市面主流的 M3/M4,有 20%性能提升;
通过 I-Cache 实现对 flash 的零延迟访问,拥有零延迟 AHB 总线矩阵,支持多并发总线;
拥有信号间互联矩阵,可对多个事件进行逻辑组合,可实现较为复杂的功能;
移植
本次 rt-thread 的移植参考了 “Rice 我叫加饭?” 的博文:https://aijishu.com/a/1060000000347637 参考代码: https://gitee.com/RiceChen0/mm32f5270_rtt(感谢原作者的付出) 这里我重点说一下不一样的地方:
1.打印重定向到虚拟串口
虽然 Mini-F5265-OB 开发板上没有板载 CH340,但这也不影响交互功能,官方提供了一种新的途径:通过板载的 MM32-LINK-OB 的虚拟串口来实现串口的交互。 简述实现的流程:
PC 通过 USB 连接板载的 MM32-LINK-OB;
板载的 MM32-LINK-OB 将 USB 数据转发成 SWD 接口信号和串口的 tx/rx 信号;
最终信号达到 Mini-F5265-OB 开发板,实现串口的交互和程序的烧写功能;
板载的 MM32-LINK-OB,连接如下图所示:
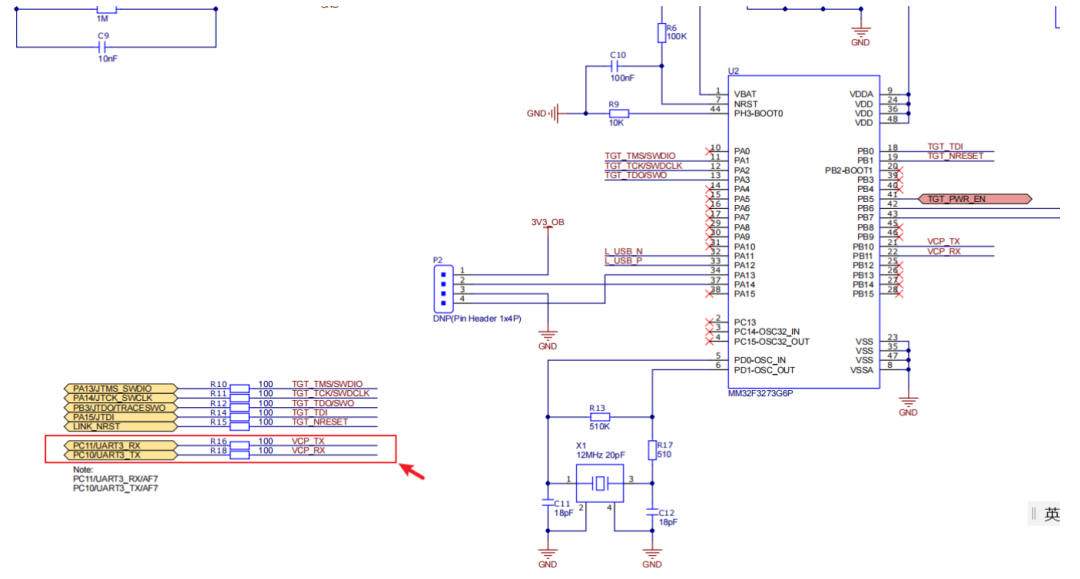
Mini-F5265-OB 开发板,连接如下图所示:
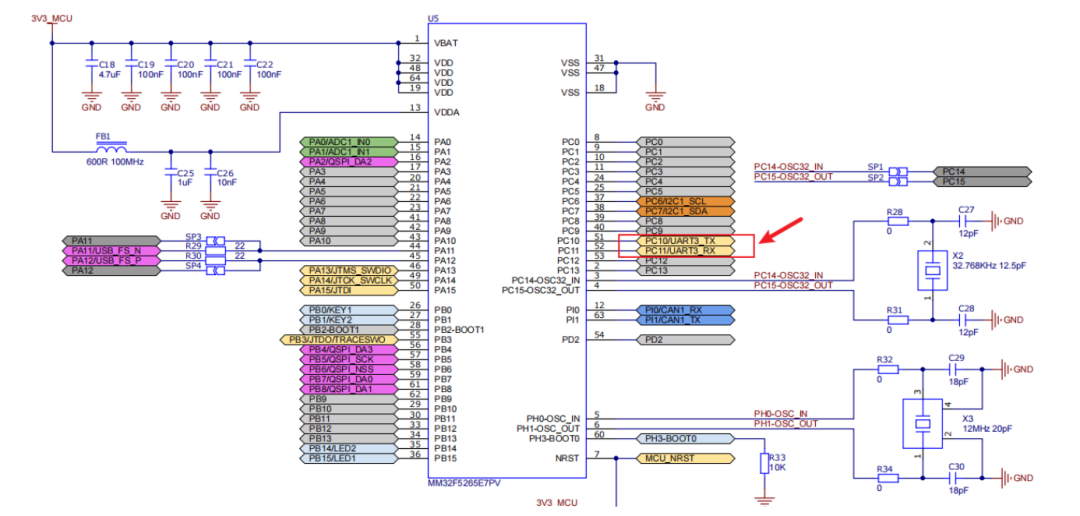
因此,移植的第一步就是要用上虚拟串口。
通过查看上述的原理图可知虚拟串口用到 uart3。
修改 drv_uart.h,添加 uart3 支持:
#if defined(BSP_USING_UART3)
#ifndef UART3_CONFIG
#define UART3_CONFIG
{
.name = "uart3",
.rx_gpiox = GPIOC,
.rx_rcc_clock = RCC_AHBPeriph_GPIOC,
.rx_pin = GPIO_Pin_11,
.rx_gpio_af = GPIO_AF_7,
.tx_gpiox = GPIOB,
.tx_rcc_clock = RCC_AHBPeriph_GPIOC,
.tx_pin = GPIO_Pin_10,
.tx_gpio_af = GPIO_AF_7,
.uart_rcc_clock = RCC_APB1Periph_UART3,
.uartx = UART3,
.irq_type = UART3_IRQn,
}
#endif /* UART3_CONFIG */
#endif /* BSP_USING_UART3 */
修改 drv_uart.c,uart3 使用的 PC10 和 PC11 需要初始化:
static int rt_hw_uart_gpio_init(struct mm32_uart_config *cfg)
{
GPIO_InitTypeDef GPIO_InitStruct;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_UART3, ENABLE);
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOC, ENABLE);
GPIO_PinAFConfig(GPIOC, GPIO_PinSource10, GPIO_AF_7);
GPIO_PinAFConfig(GPIOC, GPIO_PinSource11, GPIO_AF_7);
GPIO_StructInit(&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_High;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOC, &GPIO_InitStruct);
GPIO_StructInit(&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_11;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IPU;
GPIO_Init(GPIOC, &GPIO_InitStruct);
return RT_EOK;
}
修改 drv_uart.c,实现 mm32_uart_ops(由于篇幅原因,这里仅截取关键部分)
static rt_err_t mm32_control(struct rt_serial_device *serial,
int cmd,
void *arg)
{
struct mm32_uart *uart;
rt_ubase_t ctrl_arg = (rt_ubase_t)arg;
RT_ASSERT(serial != RT_NULL);
uart = rt_container_of(serial, struct mm32_uart, serial);
switch (cmd)
{
case RT_DEVICE_CTRL_SET_INT:
{
UART_ITConfig(uart->config->uartx, UART_IT_RX, ENABLE);
NVIC_EnableIRQ(uart->config->irq_type);
break;
}
case RT_DEVICE_CTRL_CLR_INT:
{
UART_ITConfig(uart->config->uartx, UART_IT_RX, DISABLE);
NVIC_DisableIRQ(uart->config->irq_type);
break;
}
}
return 0;
}
static int mm32_putc(struct rt_serial_device *serial, char c)
{
struct mm32_uart *uart;
RT_ASSERT(serial != RT_NULL);
uart = rt_container_of(serial, struct mm32_uart, serial);
UART_SendData(uart->config->uartx, (uint8_t)(c));
while (RESET == UART_GetFlagStatus(uart->config->uartx, UART_FLAG_TXC)) {};
return 1;
}
static int mm32_getc(struct rt_serial_device *serial)
{
struct mm32_uart *uart;
int ch = -1;
RT_ASSERT(serial != RT_NULL);
uart = rt_container_of(serial, struct mm32_uart, serial);
if(UART_GetFlagStatus(uart->config->uartx, UART_FLAG_RXAVL))
{
ch = UART_ReceiveData(uart->config->uartx);
return ch;
}
return -1;
}
static void uart_isr(struct rt_serial_device *serial)
{
struct mm32_uart *uart;
RT_ASSERT(serial != RT_NULL);
uart = rt_container_of(serial, struct mm32_uart, serial);
if(SET == UART_GetFlagStatus(uart->config->uartx, UART_IT_RX))
{
rt_hw_serial_isr(serial, RT_SERIAL_EVENT_RX_IND);
}
}
void UART3_IRQHandler(void)
{
rt_interrupt_enter();
uart_isr(&(uart_obj[UART3_INDEX].serial));
rt_interrupt_leave();
}
2.添加 hal 库等文件
从官方的提供的例程资料中找到 HAL_Lib 文件夹,将里面的头文件和源文件拷贝工程的 libraries/drivers 目录里面。
修改 libraries/drivers 的 mm32f5260.h,定义“USE_STDPERIPH_DRIVER”的宏。(注意官方提供的默认没有定义该宏,需要定义后才会编译标准外设驱动库)
在 libraries/drivers 目录创建 hal_common.h,并在里面包含"hal_conf.h",目的是在外面可以调到 hal 层的函数接口。
将官方提供的 core_starmc1.h 拷贝到工程的 libraries/libraries/CMSIS/Include 目录下,替换原来的 core_star.h。
将官方提供的 source 文件夹里面的文件整理到 libraries 和 mdk 目录。
注:以上仅列出关键部分,其余详见代码仓库。
3.实现 systisk
跟以往不同的是:本次使用的 SDK 里面已经实现了对系统时钟的初始化(system_mm32f5260.c),我们仅需实现 systisk 即可,代码如下:
void SysTick_Init(void)
{
uint32_t reload = 0;
SysTick->CTRL &= (uint32_t)0xFFFFFFFB;
reload = CLOCK_SYSTICK_FREQ/RT_TICK_PER_SECOND;
reload--;
SysTick->CTRL |= SysTick_CTRL_TICKINT_Msk;
SysTick->LOAD = reload;
SysTick->CTRL |= SysTick_CTRL_ENABLE_Msk;
}
void SysTick_Handler(void)
{
/* enter interrupt */
rt_interrupt_enter();
rt_tick_increase();
/* leave interrupt */
rt_interrupt_leave();
}
void rt_hw_board_init()
{
SysTick_Init();
SystemClock_Config();
#if defined(RT_USING_HEAP)
rt_system_heap_init(HEAP_BEGIN, (void *)HEAP_END);
#endif
#ifdef RT_USING_SERIAL
extern int rt_hw_uart_init(void);
rt_hw_uart_init();
#endif
#if defined(RT_USING_CONSOLE) && defined(RT_USING_DEVICE)
rt_console_set_device(RT_CONSOLE_DEVICE_NAME);
#endif
#ifdef RT_USING_COMPONENTS_INIT
rt_components_board_init();
#endif
}
移植效果
到此为止,基本上已经完成了移植工作。
编译,烧写,可以到 rt-thread 的打印:
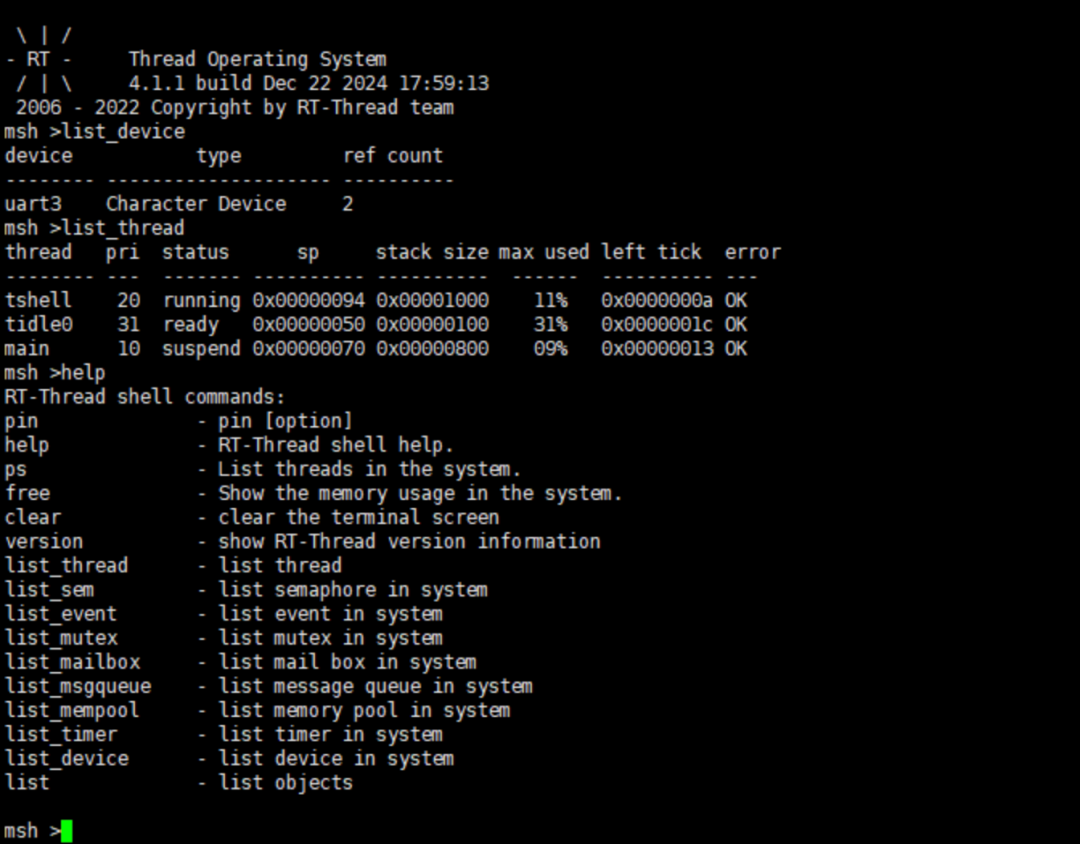
查看开发板可看到 LED2 隔 500ms 闪烁一次。
总结
本次移植过程修改的地方不多,主要是因为 SDK 变动而做的修改。在此,可以看到灵动微在维护 hal 库做出的努力。毕竟 hal 层兼容性越强,可以吸收更多潜在用户,节省用户熟悉 SDK 的时间,这也是国产芯片替代的必经之路。
最后,感谢灵动微和极术社区提供的平台,也祝愿国产芯片越来越好。
仓库代码: https://gitee.com/sakura96888/mm32f5260_rtt
转自 | 极术社区
-
STM32 BSP怎样快速移植RT-Thread到STM32开发板上去2021-10-19 2608
-
移植RT-Thread的原理与方法2021-09-17 10516
-
【国产MCU移植】HC32F460基于Keil MDK 移植 RT-Thread Nano2021-11-18 1510
-
【国产MCU移植】移植RT-Thread到国产芯片HC32F460PETB2021-11-23 1474
-
RT-Thread移植到GD32F150系列MCU2021-12-07 1010
-
RT-Thread系统移植到STM32f1032021-12-09 1378
-
基于 Keil MDK 移植 RT-Thread Nano2022-01-26 1632
-
RT-Thread文档_RT-Thread SMP 介绍与移植2023-02-22 1684
-
【灵动微】FTHR-G0140开发板移植RT-Thread驱动2023-06-05 218768
-
机智云设备移植RT-Thread2022-04-19 2050
-
移植RT-Thread nano到CW32L0832023-07-03 24087
-
RT-Thread qemu mps2-an385 bsp移植制作 :环境搭建篇2023-08-02 1766
-
rt-studio潘多拉开发板最新rt-thread不能运行解决办法2023-10-16 2897
-
RT-thread源码移植到STM32F10x和STM32F4xx2023-11-15 4629
全部0条评论

快来发表一下你的评论吧 !
