

汇川伺服如何进行EtherCAT总线控制
描述
一、EtherCAT 技术特性概述
作为工业自动化领域的主流通信协议,EtherCAT 凭借其独特的技术优势在复杂控制场景中得到广泛应用:
支持多样化网络布局,可灵活构建总线型、星型或混合网络架构
采用标准以太网物理层,显著降低系统部署与扩展成本
通过分布式时钟同步机制,实现 μs 级实时通信响应
设备即插即用功能简化系统维护流程
二、系统搭建与调试步骤
1. 硬件连接规范
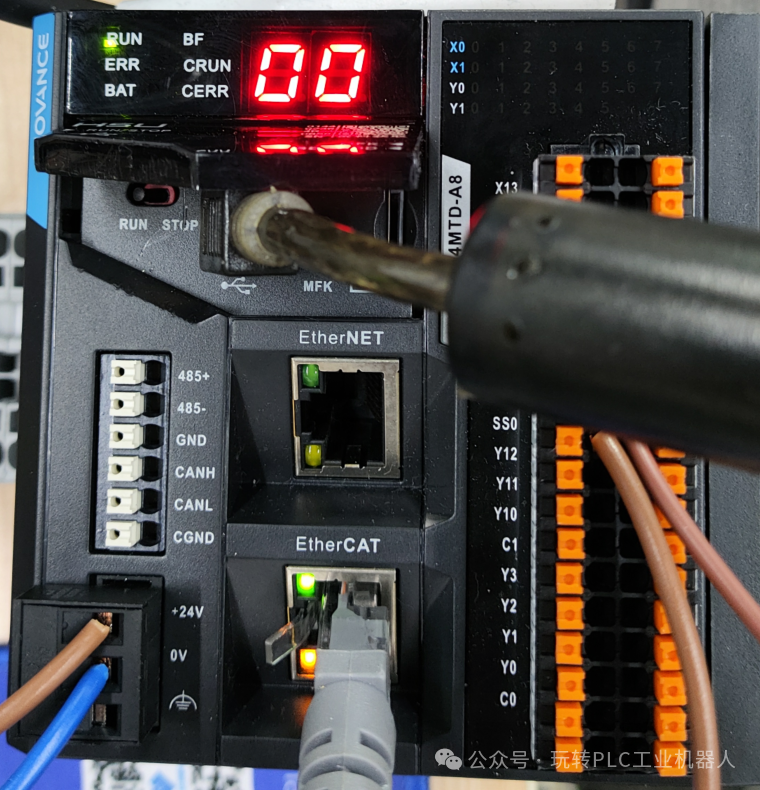
主站设备:汇川 H5U 系列 PLC(集成 EtherCAT 主站接口)
从站设备:SV660 伺服驱动器(标配 EtherCAT 通信模块)
网络连接:首先把通讯线插上,PLC下面的口插到驱动器CN3口,就可以了,驱动器不用做任何配置。(如果有第2台伺服,可以从第一台伺服的CN4口链接一根线到下一台伺服的CN3即可,还有更多,同样的添加方法,5U的PLC最多支持32轴控制)

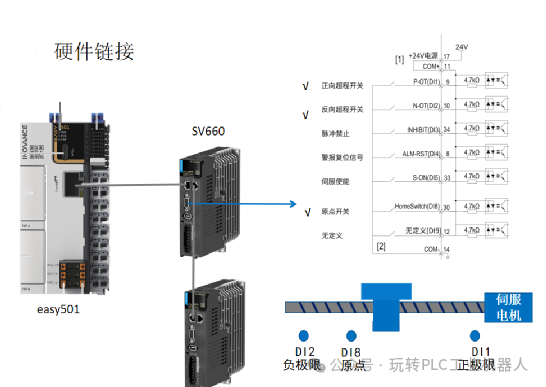
2. 外围信号接线
伺服驱动器的CN1端口的接线,主要需要连接的有3个信号(正极限、负极限、原点),伺服使能可以通讯直接控制,报警复位可以接上。接线图如下所示:
3. 软件配置流程
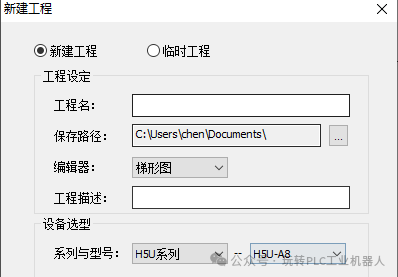
1)工程创建:在 InoProShop 中选择对应 PLC 型号
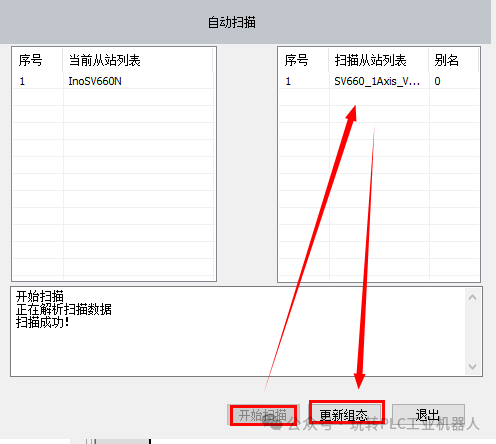
2)网络扫描:通过 EtherCAT 主站自动识别伺服节点。
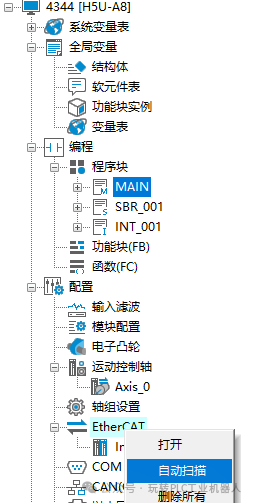
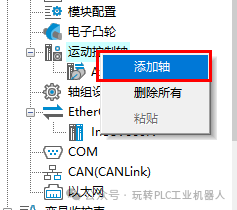
3)轴配置:
选择扫描到的伺服设备作为输出对象
配置电子齿轮比等运动参数
把程序下载到PLC里面。
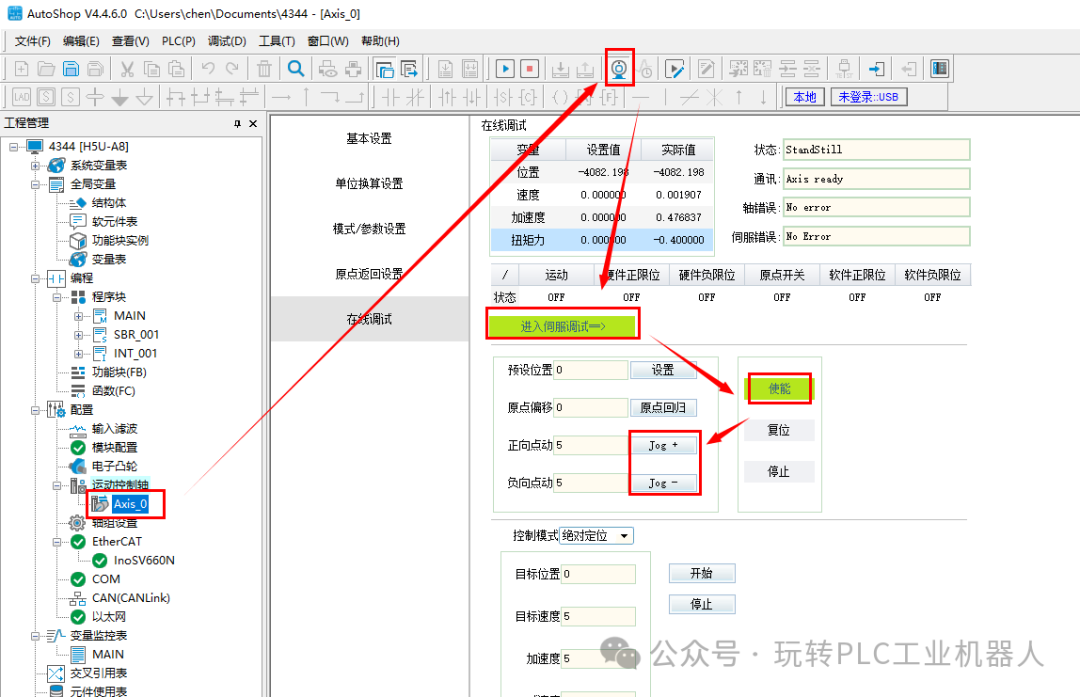
4. 功能验证与调试
M0 激活点动功能
M10/M11 分别控制正反转方向
伺服使能:软件使能按钮可以进行伺服使能
点动测试:
三、系统功能模块解析
使能控制模块
把使能的块拉过来,当M100导通,伺服就会使能,可以进行定位控制。
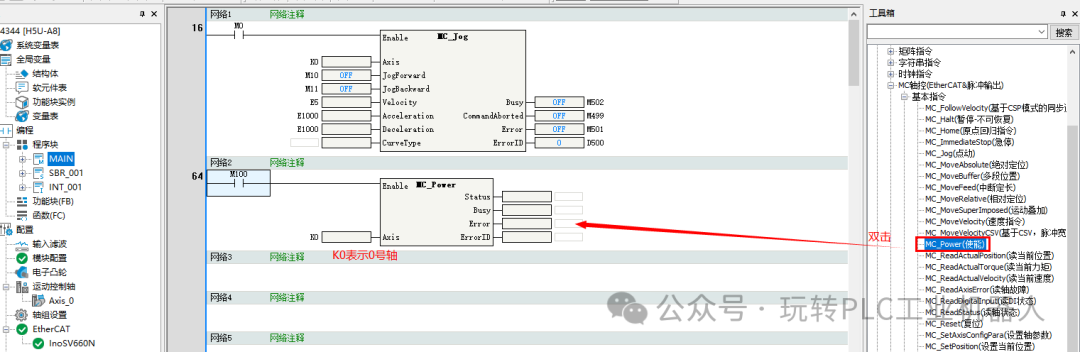
2.使能点动控制块
把JOG的块拖过来,第一个K0表示0号轴,当M0导通轴就开始转动,需要配合M10或者M11,M10表示正转,M11表示反转(其他点位,当你的鼠标放在对应引脚上面时,会自动显示对应的中文含义,可以看出其对应的功能)

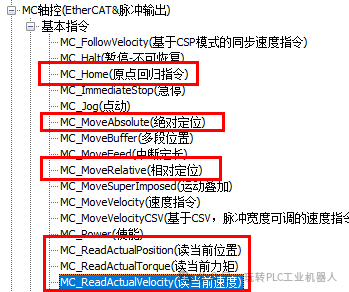
3.定位控制模块
绝对定位:指定目标位置与速度参数
相对定位:基于当前位置的位移增量控制
原点回归:支持多种寻原点模式(如 Z 相信号捕捉)
好了,本文就给大家讲解到这里,详细功能大家可以通过实操自己去学习。
来源:玩转PLC工业机器人。
-
确认过眼神,是对的总线:疆鸿智能DEVICENET转PROFIBUS拿捏汇川伺服2026-03-11 355
-
烟丝喂送的‘翻译官’:EtherCAT与DeviceNet汇川伺服的无缝对话”2026-02-25 434
-
疆鸿智能 EtherNet/IP转ETHERCAT网关:打通罗克韦尔与汇川伺服的石材产线2026-01-12 561
-
大型金属选矿厂汇川PLC通过CCLKIE转EtherCAT工业智能网关和多个伺服进行通讯解决方案案例2025-10-27 1049
-
大型选矿厂汇川PLC借CCLKIE转EtherCAT网关驱控多伺服实战案例2025-10-22 706
-
EtherCAT转Profinet网关与汇川伺服系统集成及轮廓模式应用解析2025-07-23 1021
-
EtherCAT主站转Profinet网关接汇川伺服实现速度控制功能2025-07-10 879
-
EtherCAT主站转Profinet网关接汇川伺服操作模式的控制解析2025-07-09 919
-
基于EtherCAT转Profinet网关接汇川伺服系统操作模式控制技术方案2025-06-30 1325
-
EtherCAT转CANopen网关与伺服器在汇川组态软件上的配置步骤2025-06-12 1966
-
ethercat总线伺服如何控制 EtherCAT运行原理2024-01-24 11930
-
CRIO9082与汇川伺服ECT通讯异常求助2022-04-20 7405
-
EtherCAT总线运动控制器硬件是如何进行接线的?2021-07-15 7669
-
汇川伺服应用调试手册(3)2017-04-26 15224
全部0条评论

快来发表一下你的评论吧 !
