

STM32项目分享:STM32智能语音分类垃圾桶
描述
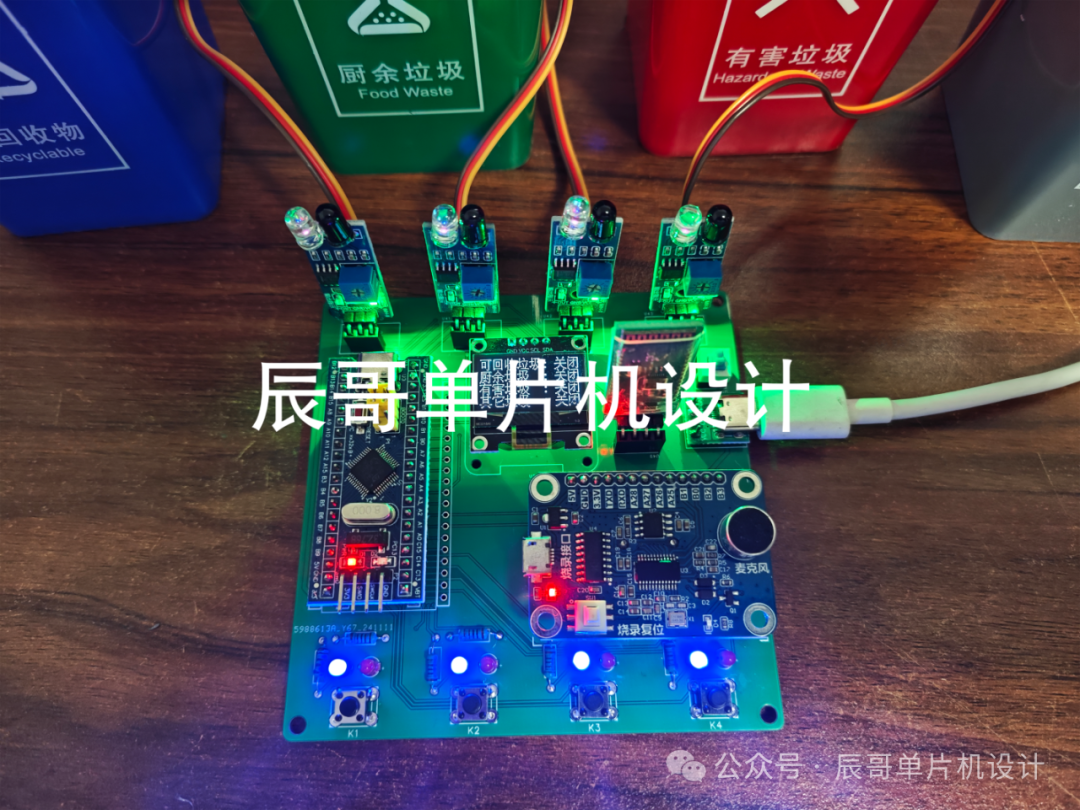
项目成品图片:

01
—
项目简介
1.功能详解
STM32智能语音分类垃圾桶
功能如下:
1. STM32F103C8T6单片机系统板作为主控单元
2. 舵机驱动垃圾桶盖打开与关闭
3. 按键控制四个分类垃圾桶的开关
4. 语音识别控制分类垃圾桶开关
5. 光电红外传感器监测垃圾是否已满,并指示灯提示
6. OLED显示屏显示分类垃圾桶开关状态
7. 手机蓝牙APP接收分类垃圾桶已满消息
2.材料清单
STM32F103C8T6单片机
OLED 屏幕
光电红外传感器
SNR8016语音识别模块
BT04A蓝牙模块
舵机
02
—
原理图设计
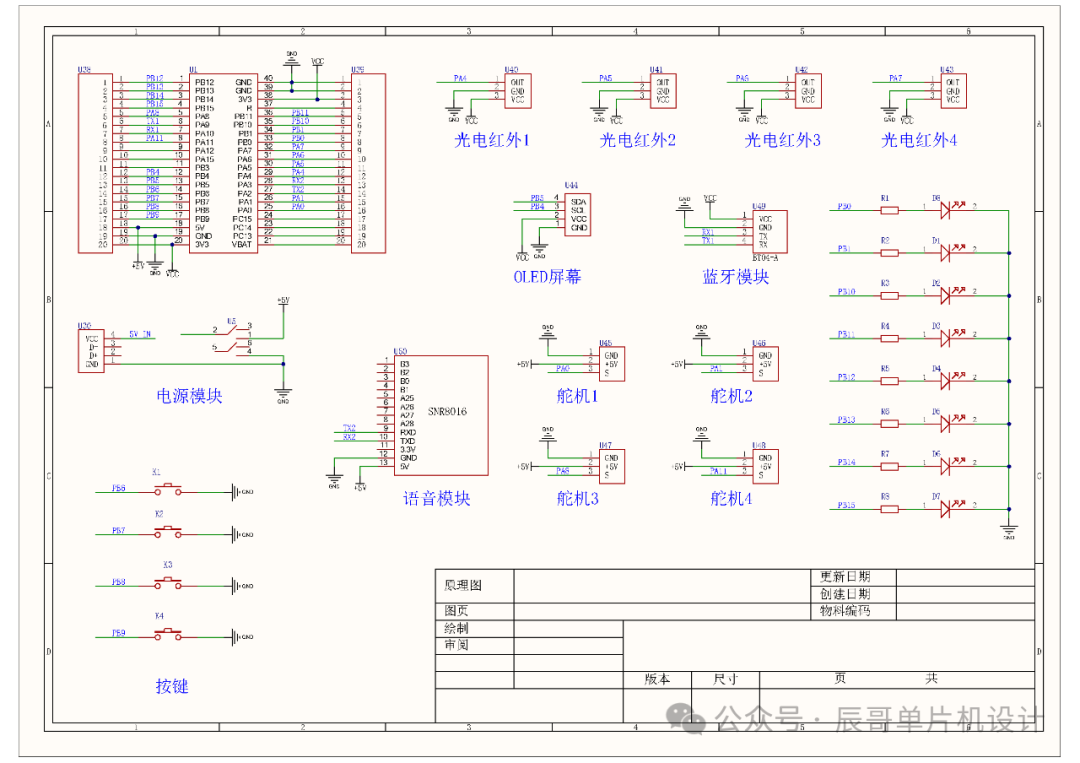
03
—
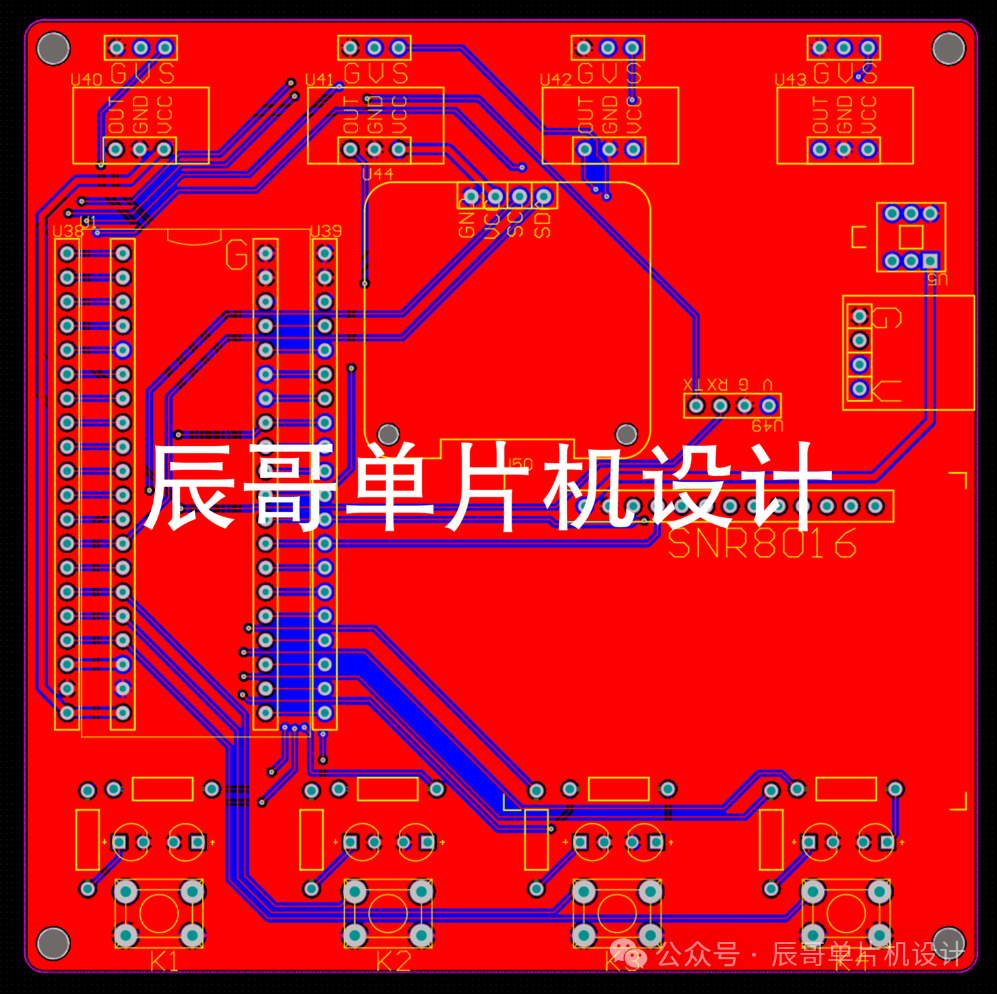
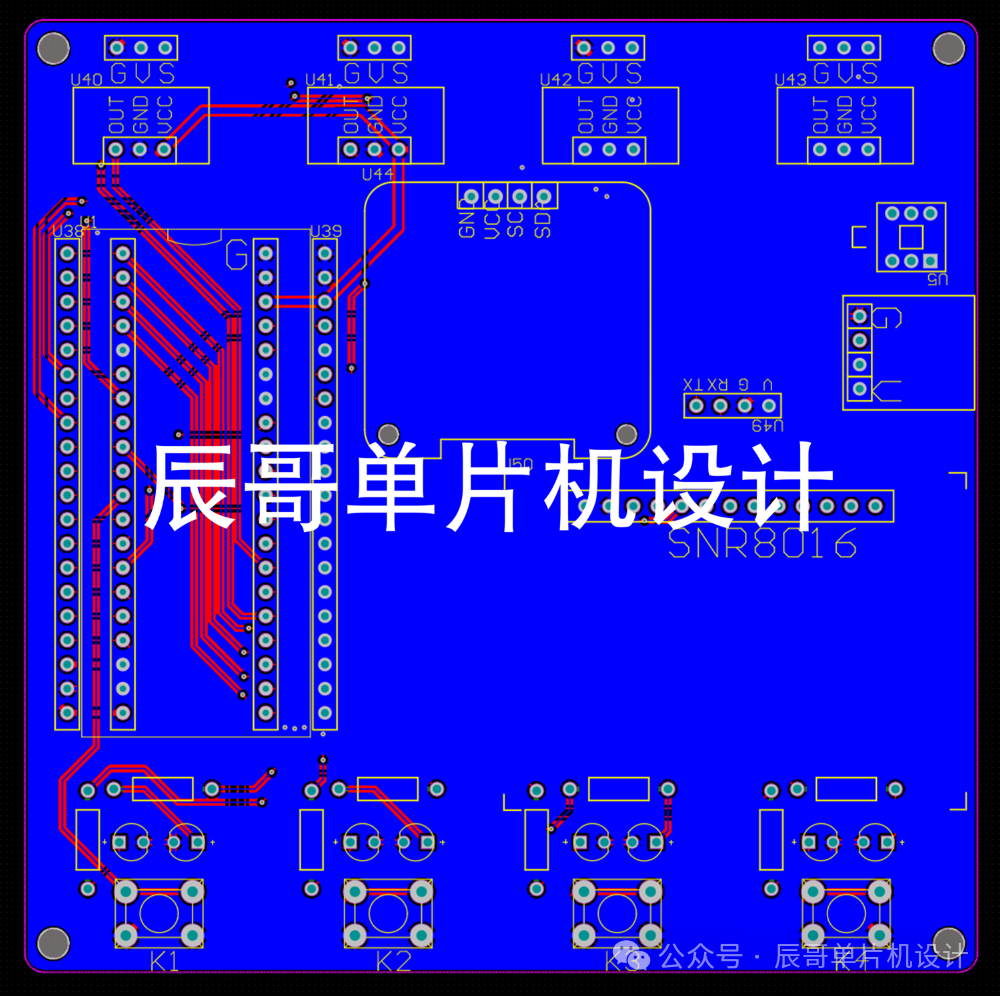
PCB硬件设计
PCB图
04
—
程序设计
#include "sys.h"#include "stdio.h"#include "string.h"#include "delay.h"#include "gpio.h"#include "key.h"#include "usart.h"#include "motor_duoji.h"#include "oled.h"
/**********************************变量定义**********************************/uint8_t key_num = 0;//按键扫描标志位uint32_t time_num = 0;//10ms计时uint8_t flag_waste_1 = 0;//可回收垃圾桶标志位uint8_t flag_waste_2 = 0;//厨余垃圾桶标志位
uint8_t flag_waste_3 = 0;//有害垃圾桶标志位uint8_t flag_waste_4 = 0;//其他垃圾桶标志位extern uint8_t usart2_buf[64];//串口2接收数组
/**********************************函数声明**********************************/void Key_function(void);//按键函数
void Monitor_function(void);//监测函数void Manage_function(void);//处理函数
/***********主函数 *****/int main(){Delay_Init(); //延时初始化 Gpio_Init(); //IO初始化Key_Init(); //按键初始化Motor_Duoji_Init(); //舵机初始化Motor_Duoji2_Init(); //舵机初始化OLED_Init();Usart1_Init(9600);//串口1初始化Usart2_Init(9600);//串口2初始化
TIM_SetCompare1(TIM1,1830); //PWM输出Delay_ms(100);//延时100msTIM_SetCompare4(TIM1,1830); //PWM输出Delay_ms(100);//延时100msTIM_SetCompare1(TIM2,1830); //PWM输出Delay_ms(100);//延时100msTIM_SetCompare2(TIM2,1830); //PWM输出Delay_ms(100);//延时
100msOLED_Clear();OLED_ShowChinese(0,0,0,16,1);OLED_ShowChinese(16,0,1,16,1);OLED_ShowChinese(32,0,2,16,1);OLED_ShowChinese(48,0,15,16,1);OLED_ShowChinese(64,0,16,16,1);OLED_ShowChar(80,0,':',16,1);OLED_ShowChinese(96,0,11,16,1);OLED_ShowChinese(112,0,12,16,1);
OLED_ShowChinese(0,16,3,16,1);OLED_ShowChinese(16,16,4,16,1);OLED_ShowChinese(32,16,15,16,1);OLED_ShowChinese(48,16,16,16,1);OLED_ShowChar(80,16,':',16,1);OLED_ShowChinese(96,16,11,16,1);OLED_ShowChinese(112,16,12,16,1);
OLED_ShowChinese(0,32,5,16,1);OLED_ShowChinese(16,32,6,16,1);OLED_ShowChinese(32,32,15,16,1);OLED_ShowChinese(48,32,16,16,1);OLED_ShowChar(80,32,':',16,1);OLED_ShowChinese(96,32,11,16,1);OLED_ShowChinese(112,32,12,16,1);
OLED_ShowChinese(0,48,7,16,1);OLED_ShowChinese(16,48,8,16,1);OLED_ShowChinese(32,48,15,16,1);OLED_ShowChinese(48,48,16,16,1);OLED_ShowChar(80,48,':',16,1);OLED_ShowChinese(96,48,11,16,1);OLED_ShowChinese(112,48,12,16,1);
while(1){key_num = Chiclet_Keyboard_Scan(0);//按键扫描
if(key_num != 0)//有按键按下
{switch(key_num){case 1://按键1:控制可回收垃圾桶打开OLED_ShowChinese(96,0,9,16,1);OLED_ShowChinese(112,0,10,16,1);TIM_SetCompare1(TIM2,1920); //打开
Delay_ms(1000);//延时2sDelay_ms(1000);TIM_SetCompare1(TIM2,1830); //关闭OLED_ShowChinese(96,0,11,16,1);OLED_ShowChinese(112,0,12,16,1);break;
case 2://按键2:控制厨余垃圾桶打开
OLED_ShowChinese(96,16,9,16,1);OLED_ShowChinese(112,16,10,16,1);TIM_SetCompare2(TIM2,1920); //打开
Delay_ms(1000);//延时2sDelay_ms(1000);TIM_SetCompare2(TIM2,1830); //关闭
OLED_ShowChinese(96,16,11,16,1);OLED_ShowChinese(112,16,12,16,1);break;
case 3://按键3:控制有害垃圾桶打开OLED_ShowChinese(96,32,9,16,1);OLED_ShowChinese(112,32,10,16,1);TIM_SetCompare1(TIM1,1920); //打开
Delay_ms(1000);//延时2sDelay_ms(1000);TIM_SetCompare1(TIM1,1830); //关闭OLED_ShowChinese(96,32,11,16,1);OLED_ShowChinese(112,32,12,16,1);break;
case 4://按键4:控制其他垃圾桶打开
OLED_ShowChinese(96,48,9,16,1);OLED_ShowChinese(112,48,10,16,1);TIM_SetCompare4(TIM1,1920); //打开Delay_ms(1000);//延时2sDelay_ms(1000);TIM_SetCompare4(TIM1,1830); //关闭
OLED_ShowChinese(96,48,11,16,1);OLED_ShowChinese(112,48,12,16,1);break;
default:break;}}if(USART2_WaitRecive() == 0)//如果收到数据{if(usart2_buf[0] == 0x01)//收到语音指令是“废纸|塑料瓶|可回收垃圾”,控制可回收垃圾桶打开
{OLED_ShowChinese(96,0,9,16,1);OLED_ShowChinese(112,0,10,16,1);TIM_SetCompare1(TIM2,1920); //打开
Delay_ms(1000);//延时2sDelay_ms(1000);TIM_SetCompare1(TIM2,1830); //关闭USART2_Clear();//清空缓存
OLED_ShowChinese(96,0,11,16,1);OLED_ShowChinese(112,0,12,16,1);}else if(usart2_buf[0] == 0x02)//收到语音指令是“剩饭|骨头|厨余垃圾”,控制厨余垃圾桶打开
{OLED_ShowChinese(96,16,9,16,1);OLED_ShowChinese(112,16,10,16,1);TIM_SetCompare2(TIM2,1930); //打开
Delay_ms(1000);//延时2sDelay_ms(1000);TIM_SetCompare2(TIM2,1820); //关闭USART2_Clear();//清空缓存
OLED_ShowChinese(96,16,11,16,1);OLED_ShowChinese(112,16,12,16,1);}else if(usart2_buf[0] == 0x03)//收到语音指令是“灯泡|有害垃圾”,控制有害收垃圾桶打开
{OLED_ShowChinese(96,32,9,16,1);OLED_ShowChinese(112,32,10,16,1);TIM_SetCompare1(TIM1,1920); //打开Delay_ms(1000);//延时2sDelay_ms(1000);TIM_SetCompare1(TIM1,1830); //关闭USART2_Clear();//清空缓存OLED_ShowChinese(96,32,11,16,1);OLED_ShowChinese(112,32,12,16,1);}else if(usart2_buf[0] == 0x04)//收到语音指令是“木头|其他垃圾”,控制其他垃圾桶打开
{OLED_ShowChinese(96,48,9,16,1);OLED_ShowChinese(112,48,10,16,1);TIM_SetCompare4(TIM1,1920); //打开Delay_ms(1000);//延时2sDelay_ms(1000);TIM_SetCompare4(TIM1,1830); //关闭USART2_Clear();//清空缓存OLED_ShowChinese(96,48,11,16,1);OLED_ShowChinese(112,48,12,16,1);}}if(IR_1 == 0)//可回收垃圾桶装满,红灯亮,并通过蓝牙发送"可回收垃圾桶已满"{Delay_ms(100);if(IR_1 == 0){LED1_G = 0;LED1_R = 1;if(flag_waste_1){UsartPrintf(USART1,"可回收垃圾桶已满\r\n");flag_waste_1 = 0;}}}else//未装满,绿灯亮{LED1_G = 1;LED1_R = 0;flag_waste_1 = 1;}
if(IR_2 == 0)//厨余垃圾桶装满,红灯亮,并通过蓝牙发送"厨余垃圾桶已满"{Delay_ms(100);if(IR_2 == 0){LED2_G = 0;LED2_R = 1;if(flag_waste_2){UsartPrintf(USART1,"厨余垃圾桶已满\r\n");flag_waste_2 = 0;}}}else//未装满,绿灯亮
{LED2_G = 1;LED2_R = 0;flag_waste_2 = 1;}
if(IR_3 == 0)//有害垃圾桶装满,红灯亮,并通过蓝牙发送"有害垃圾桶已满"{Delay_ms(100);if(IR_3 == 0){LED3_G = 0;LED3_R = 1;if(flag_waste_3){UsartPrintf(USART1,"有害垃圾桶已满\r\n");flag_waste_3 = 0;}}}else//未装满,绿灯亮
{LED3_G = 1;LED3_R = 0;flag_waste_3 = 1;}
if(IR_4 == 0)//其他垃圾桶装满,红灯亮,并通过蓝牙发送"其他垃圾桶已满"{Delay_ms(100);if(IR_4 == 0){LED4_G = 0;LED4_R = 1;if(flag_waste_4){UsartPrintf(USART1,"其他垃圾桶已满\r\n");flag_waste_4 = 0;}}}else//未装满,绿灯亮
{LED4_G = 1;LED4_R = 0;flag_waste_4 = 1;}
}}
05
—
实验效果

-
基于CW32的智能语音分类垃圾桶2023-08-01 2519
-
【 平头哥CB5654语音开发板试用连载】智能垃圾桶2020-03-13 1616
-
【乐鑫ESP32-DevKitC-32D模组开发板试用连载】智能语音垃圾桶2020-07-03 9086
-
【大联大品佳 Nuvoton ISD9160语音识别试用申请】语音控制的智能垃圾分类垃圾桶2020-08-10 1640
-
人工智能分类垃圾桶原理2021-07-21 2196
-
基于stm32的智能垃圾桶设计2021-08-11 3258
-
怎样去设计一种基于STM32的智能语音识别垃圾桶2021-10-11 2129
-
基于51单片机的一个语音识别分类智能垃圾桶设计2021-11-18 4393
-
求大佬分享STM32实现的语音识别智能垃圾桶的代码2021-12-13 2369
-
基于小凌派RK2206的智能垃圾桶设计2023-02-13 2938
-
智能语音识别分类垃圾桶的设计资料合集2020-12-21 2967
-
『开源项目』基于STM32的智能垃圾桶之舵机控制(HAL库)2021-11-25 1609
-
『开源项目』基于STM32的智能垃圾桶之语音播报2021-12-02 1423
-
『开源项目』基于STM32的智能垃圾桶之综合代码(HAL库)2021-12-16 1471
-
基于CW32的智能语音分类垃圾桶设计2023-11-06 2889
全部0条评论

快来发表一下你的评论吧 !
