

profinet转ethercat网关的自动上料机械手集成案例
电子说
1.4w人已加入
描述
生产线还包含多台自动上下料机械手,采用了完整的混合网络解决方案:
机械手控制系统采用欧姆龙运动控制器作为主控,伺服电机负责机械手臂的精确定位。

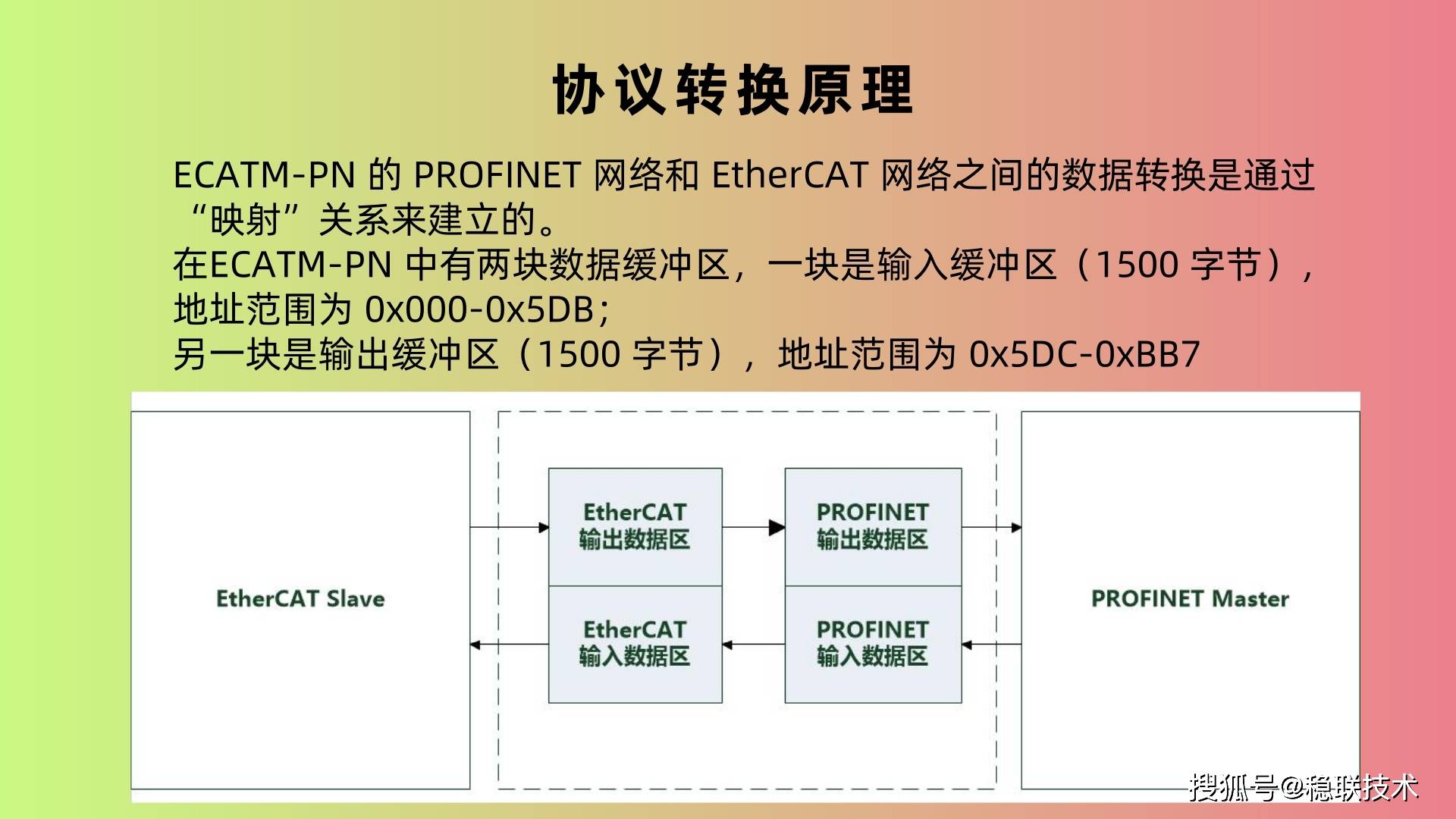
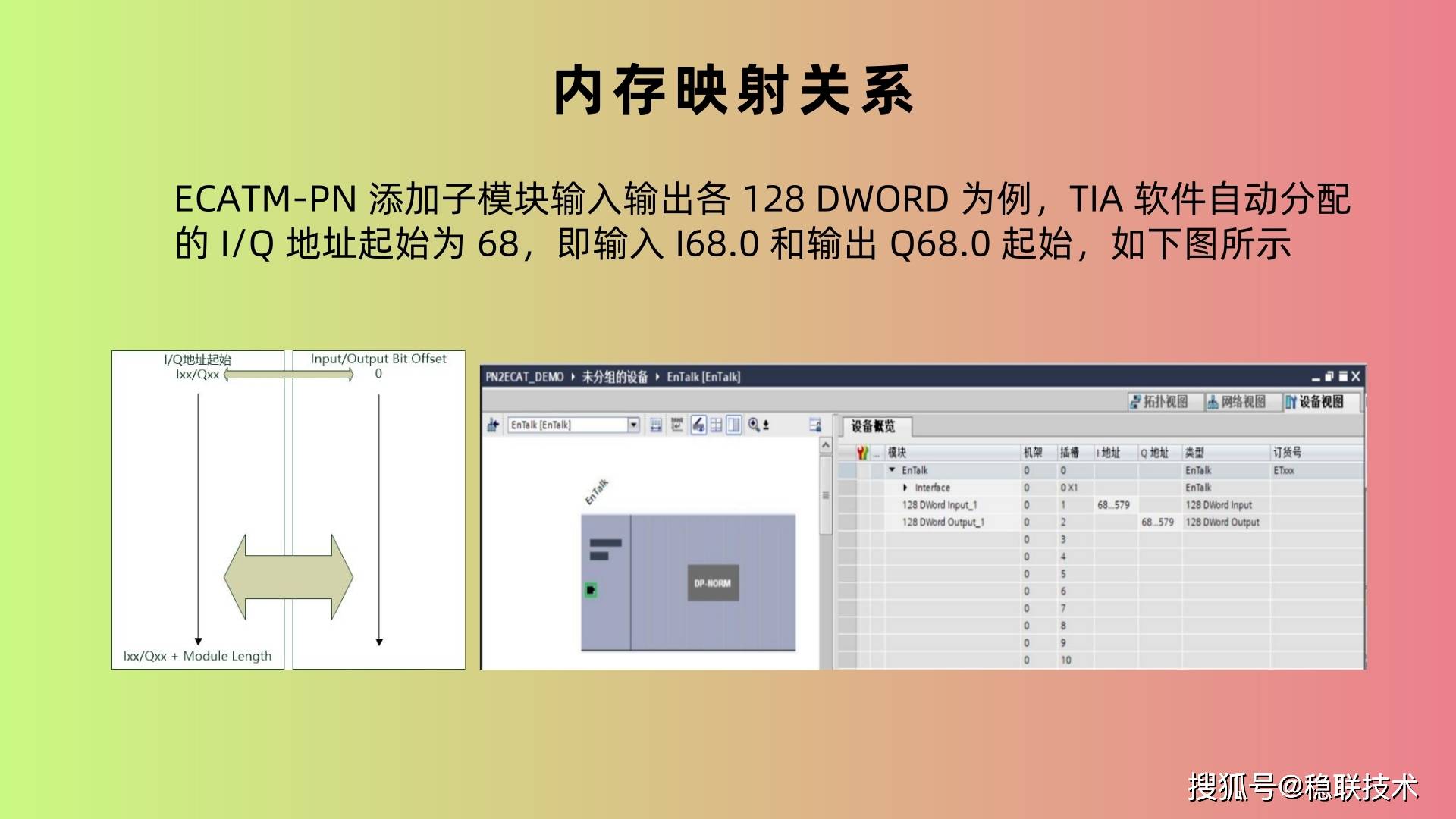
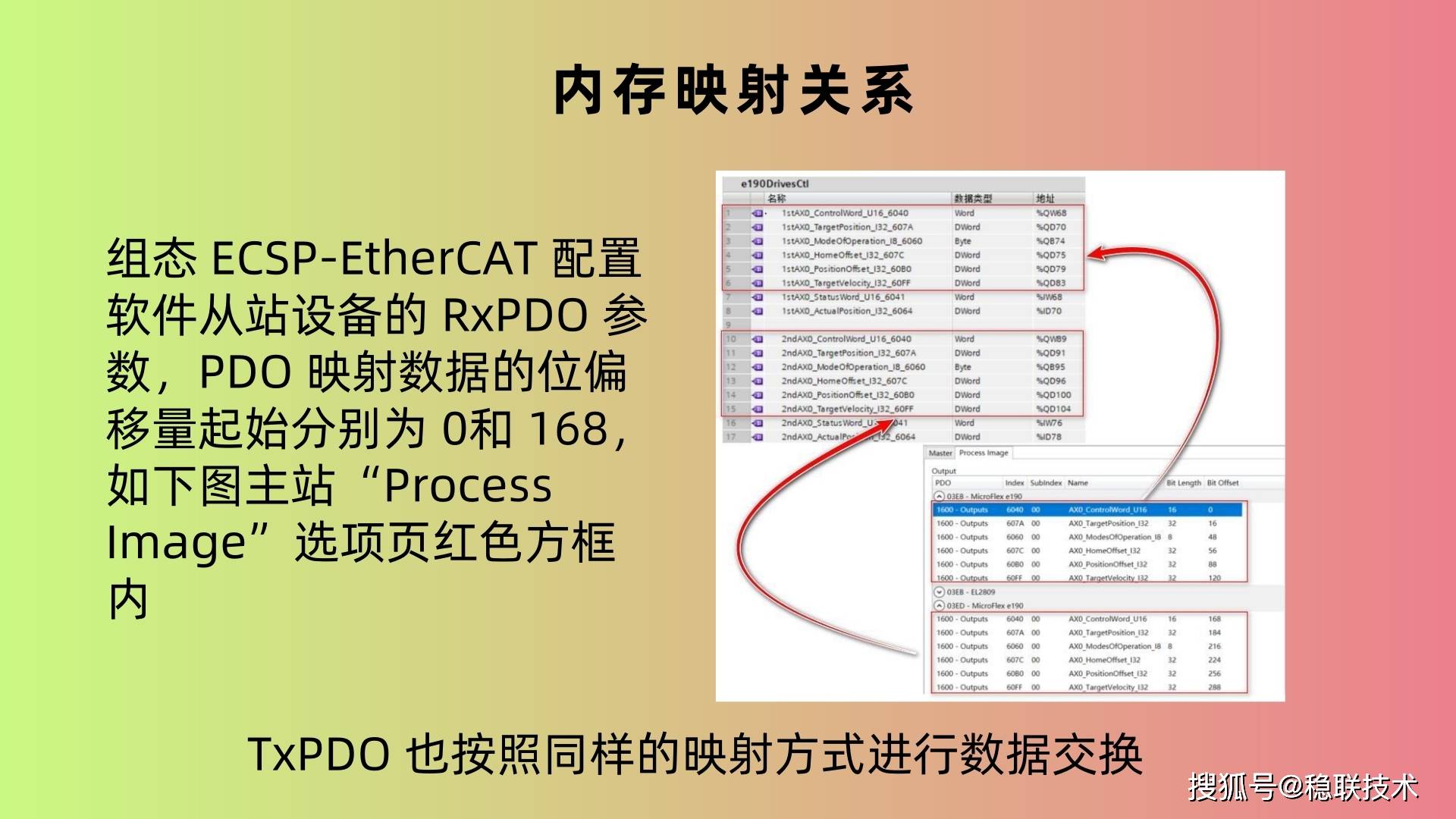
通过协议转换技术系统实现:
机械手6轴协同运动控制,位置精度达±0.02mm
分布式I/O模块通过ethercat连接视觉传感器和力反馈系统
安川伺服完美兼容两种协议的控制指令,确保平稳运行
实现生产状态数据的统一采集,支持设备预防性维护
此集成方案显著提升了生产效率,产线节拍提高25%,不良率降低超过40%。该解决方案已成为日本汽车零部件制造行业的标杆案例,展示了不同工业通信协议融合的成功实践。
审核编辑 黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
PLC与伺服完美融合:Profinet转EtherCAT网关配置详解2024-04-09 1783
-
通过Profinet转EtherCAT网关将伺服驱动与Profinet通讯2024-01-16 1315
-
Modbus转Profinet网关应用在自动上料机配置案例2023-10-29 1181
-
EPR6-S工业机器人通过EtherCAT转profinet网关接入西门子系统2023-10-24 3258
-
EtherCAT转PROFINET网关连接三星激光干涉仪2023-08-29 3213
-
通过EtherCAT转Profinet网关与西门子PLC1200通信2023-05-31 3650
-
现场纪录丨YE系列步进驱动器连接Ethercat转Profinet网关2023-05-27 6442
-
应用案例丨通过Ethercat转profinet网关控制科尔摩根驱动器2023-05-20 1373
-
应用案例丨伺服驱动器连接Ethercat转profinet网关2023-05-18 2289
-
欧姆龙耦合器通过EtherCAT转profinet网关与西门子PLC1200连接2022-12-21 11920
-
Profinet转EtherCAT网关配置案例2022-07-19 4380
-
双张检测方案可解决冲压机机械手自动化上料重叠难题2022-06-27 1789
-
PLC数控机床上料机械手控制系统设计2018-02-06 2926
全部0条评论

快来发表一下你的评论吧 !
