

深度解读英伟达Newton机器人平台:技术革新与跨界生态构建
电子说
1.4w人已加入
描述
Newton是由NVIDIA、Google DeepMind和Disney Research开发的开源、可扩展的物理引擎,旨在推进机器人学习和开发。
Newton建立在NVIDIA Warp的基础上,它使机器人能够学习如何以更高的精度处理复杂的任务,与MuJoCo Playground或NVIDIA Isaac Lab等学习框架兼容,这是一个开源的机器人学习统一框架。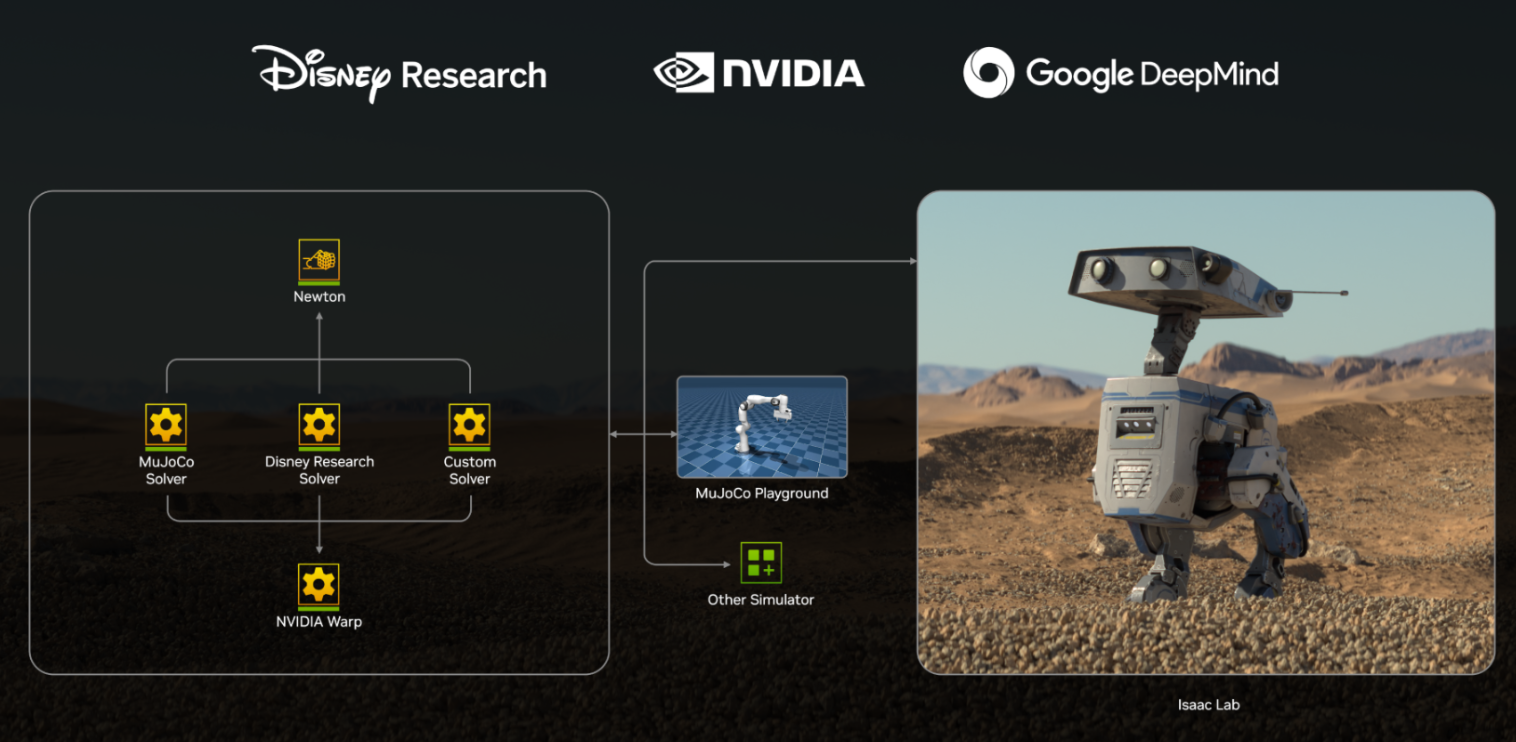
1. 技术架构:高性能物理引擎与AI融合
Newton是英伟达联合Google DeepMind和迪士尼研究院共同开发的 开源物理引擎 ,专为机器人学习与仿真优化设计。其核心技术特点包括:
- 多物理模拟能力 :支持刚体、柔体、流体等多种物理交互,尤其擅长处理可变形物体(如布料、食物、沙子)的复杂互动。例如,迪士尼计划利用该技术让机器人角色在主题公园中更自然地与游客和环境互动。
- 计算效率提升 :通过集成英伟达Warp框架和Google DeepMind的MuJoCo技术,Newton将机器人机器学习工作负载处理速度提升 70倍以上 ,并兼容Isaac Lab等仿真工具,形成从训练到部署的高效闭)。
- OpenUSD数据管线 :与迪士尼合作构建基于OpenUSD的标准化数据流,实现虚拟仿真与物理世界的无缝映射,为娱乐机器人角色提供高保真动作生成能力。
2. 行业应用:从实验室到主题公园
Newton的跨领域应用潜力是其核心价值之一:
- 娱乐机器人革命 :迪士尼成为首批用户,其开发的《星球大战》灵感机器人BDX在GTC大会上实机演示,展示了精准的肢体语言和互动能力。例如,机器人Blue能根据语音指令完成行走、姿态调整等动作,并表现出拟人化情绪反应(如兴奋时摇动臀部)。
- 工业与服务业拓展 :Newton支持开发者模拟仓储物流、医疗护理等场景中的复杂操作(如搬运易碎品、辅助康复训练),通过生成合成数据降低真实环境训练成本。
- 开源生态赋能 :预计2025年晚些时候发布早期版本,开发者可基于开源代码定制物理规则,加速人形机器人、机械臂等产品的迭代。
3. 合作战略:技术互补与生态协同
此次合作标志着AI巨头与娱乐产业的深度绑定:
- 技术整合 :英伟达提供GPU算力与仿真框架,DeepMind贡献强化学习算法(如MuJoCo-Warp),迪士尼则注入娱乐场景需求与角色设计经验,形成“算法-算力-场景”铁三角。
- 数据生成突破 :通过Isaac GR00T Blueprint,仅需少量人类演示即可生成6500小时等效合成数据,解决机器人训练数据短缺问题。例如,11小时内生成78万条合成轨迹,结合真实数据使模型性能提升40)。
- 标准化推进 :三方共同制定OpenUSD管线标准,统一机器人开发中的数据格式与接口,降低跨平台协作门槛。
4. 商业影响:重构机器人产业格局
Newton的推出可能引发以下行业变革:
- 挑战传统仿真工具 :现有工业仿真软件(如ANSYS、MATLAB)面临开源高性能替代品的竞争压力,尤其是中小型企业可通过Newton降低开发成本。
- 加速人形机器人落地 :结合英伟达同期发布的GR00T N1基础模型(双系统认知架构),Newton提供物理验证环境,推动人形机器人从单一任务向通用场景扩展。例如,1X Technologies的机器人已能完成室内清洁等长链条任务。
- 娱乐IP商业化新路径 :迪士尼的星球大战BDX机器人仅是起点,未来或衍生出教育陪伴、IP衍生品等新业态,拓展“物理AI+娱乐”的商业模式。
5. 未来挑战与展望
尽管Newton前景广阔,仍需解决:
- 生态碎片化风险 :开源可能导致不同版本兼容性问题,需建立统一的社区治理机制。
- 安全与伦理争议 :高拟真娱乐机器人可能引发隐私、情感依赖等社会争议,迪士尼需在用户体验与伦理边界间平衡。
- 硬件适配瓶颈 :Newton的高精度模拟依赖英伟达GPU算力,可能加剧AI芯片市场的垄断格局。
Get started
Build on your foundational knowledge with free OpenUSD sessions, and Learn OpenUSD and Robotics Fundamentals courses.
Related resources
- GTC session: Announcing Mujoco-Warp and Newton: How Google DeepMind and NVIDIA are Supercharging Robotics Development
- GTC session: Accelerate Physical AI Development Workflows with Omniverse Cloud Sensor RTX
- NGC Containers: Isaac Sim
- SDK: PhysX
- SDK: Isaac Lab
- SDK: Isaac Sim
结语
Newton不仅是物理引擎的技术突破,更是英伟达“AI工厂”战略的关键拼图——通过整合仿真、基础模型与高性能计算,构建从虚拟训练到实体部署的全链条生态。随着迪士尼娱乐机器人的落地与开源社区的壮大,Newton或将成为继CUDA之后,英伟达定义下一代机器人开发标准的又一里程碑。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
盘点#机器人开发平台2025-05-13 1610
-
NVIDIA Isaac 是英伟达推出的综合性机器人开发平台2025-04-02 3348
-
阿尔特携手英伟达,将Omniverse融入机器人研发2024-07-25 2218
-
NVIDIA Isaac机器人平台升级,加速AI机器人技术革新2024-03-27 1791
-
打造一个异构机器人平台2022-07-27 1948
-
SwarmUS异构机器人平台2022-07-25 572
-
机器人平台设计之arduino基础知识分享2021-09-10 2396
-
英伟达推出新款机器人,多个行业实现AI支持2019-03-13 1246
-
英伟达推出Nvidia Isaac机器人平台,积极布局机器人领域2018-09-13 2009
-
AI芯片界的领头羊进军机器人行业2018-06-11 4028
-
英伟达强势布局机器人平台,推专用芯片2018-06-05 1409
-
《机器人设计与实现》——低成本DIY机器人,一本机器人制作的经典入门书2017-08-01 195409
-
如何使用HRMRP机器人平台构建机器人应用系统2017-02-08 2194
-
【Aworks申请】爬行机器人平台2015-07-07 2828
全部0条评论

快来发表一下你的评论吧 !
