

汽车行业电子电气架构的发展趋势
描述
在2025年1月,CES 2025在美国拉斯维加斯隆重举行。作为一场聚焦前沿电子技术的展览,众多汽车行业相关产品纷纷亮相,涵盖从零部件到整车的各个方面,均围绕智能化主题展开。在此次展览中,参展商展示了新一代高算力整车芯片,以及车企官方发布的下一代算力解决方案平台。此外,人工智能技术也成为了展会的热点话题,吸引了广泛关注与讨论。
回顾2024年,国内高阶自动辅助驾驶系统的普及率迅速提升,采用更具创新、更多计算量的AI技术已成为提升自动辅助驾驶系统的主要趋势。同时,大语言模型在智能座舱和智能驾驶领域的应用也在车展和发布会上频频亮相。此外,智能化不仅体现在智能驾驶和座舱方面,车辆的其他功能系统同样经历着变革:底盘系统正朝着线控化方向发展,而动力能源系统则在快速引入绿色高效技术。
在这一发展趋势下,电子电气架构的演变将为上述新技术和趋势提供基础支持。2023年,博世就发布的白皮书《The Next Step in E/E Architectures》总结了汽车行业电子电气架构的发展趋势。未来,基于“软件定义汽车”(Software Defined Vehicle)概念将软、硬件解耦研发策略将愈加明显。在这一策略下,各个系统之间通过更高数据带宽的数据通信实现直接连接,将成为必不可少的条件。
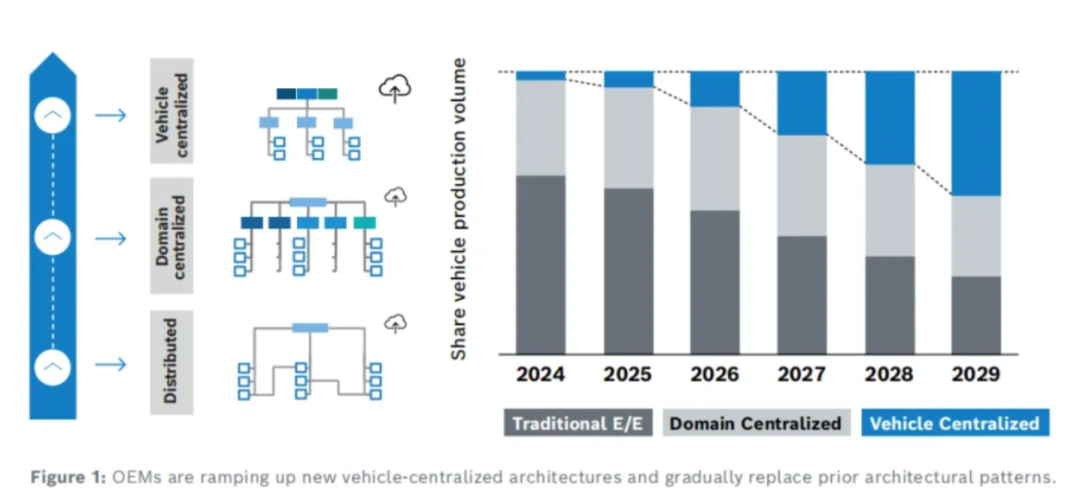
图1 未来电子电器架构的趋势
来源:博世-白皮书“The next step in E/E architectures”
新架构趋势下的网络需求演变
在电子电气架构中,网络架构设计是其关键组成部分。随着中央集中式架构趋势的兴起,网络设计也在不断演变。例如,主干网络的新数据传输需求正逐渐转移至中央计算平台内部的片内和片间通信,同时,更多车内末端网络节点的原始数据利用强大的中央计算单元进行处理。因此,如何确保网络架构与未来整车功能定位相符,以及在当前竞争激烈的环境中保持系统的持续性和可扩展性,将变得愈发重要。
成本驱动
近年来,汽车行业的发展促使越来越多的车型平台更加注重性价比。与过去强调架构方案的先进性和创新性不同,当前的趋势是聚焦于架构设计与优化的最优解,回归到成本最优化的范畴。同时,随着更多终端用户对新技术的接受度提高,最新的技术功能也开始在不同成本区间的车辆中得到应用,例如智能语言交互和高阶自驾系统。这些功能正在迅速向成本更低的车型架构平台渗透。
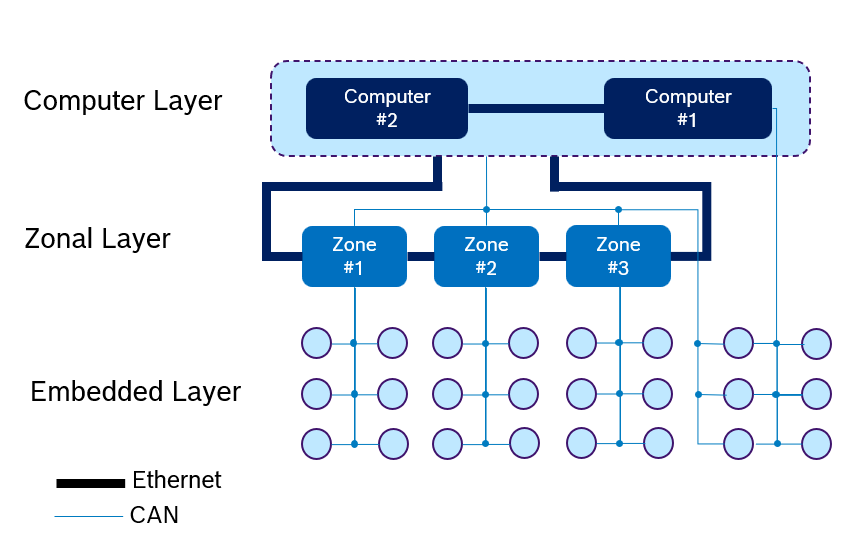
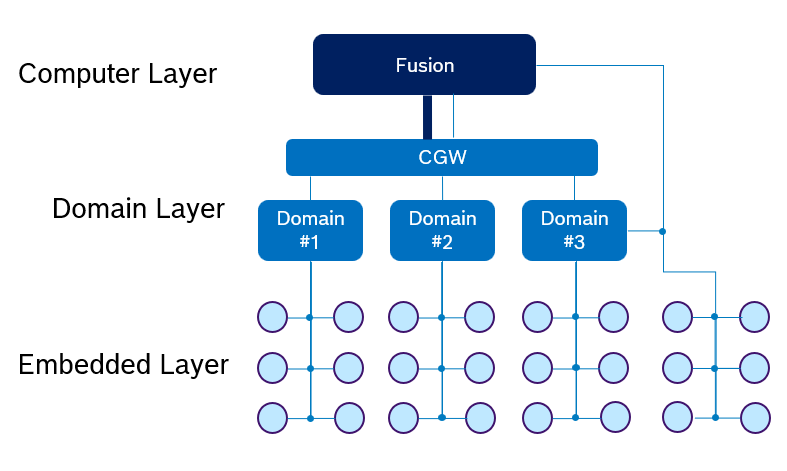
图2 中央集成架构和分布式域融合架构中网络拓扑示意
在架构拓扑设计层面,国内中高端车型越来越多地采用以太网作为主干网络的中央集成架构。核心计算单元承担着包括人工智能算力、复杂整车逻辑控制以及功能安全相关的系统功能实现等多重任务。当前,单芯片和多芯片解决方案在控制器中被广泛采用,这使得数据传输更多地发生在芯片内部或芯片之间。同时,为了满足更高的安全要求,中央计算单元与区域控制器之间采用环形冗余设计,以支持大量数据的传输。末端嵌入式系统通常通过CAN网络与区域控制单元连接。
在中低端车型或那些保留了更多传统系统的车型架构中,CAN网络连接了更多的控制器单元。即使在以功能域划分的系统控制器单元内,CAN通信仍然是主要的通信方式,以满足系统的互联互通的功能需求。随着新智能化功能的普及,中低端车型同样需要升级其智能系统,例如:智能座舱系统和高阶辅助驾驶系统。因此,这些车型也需要更高算力的计算单元来实现这些功能,融合型计算平台在低成本车型架构中将更受青睐。在这种架构中,大数据量的传输需求也同样存在,以太网在核心控制单元之间使用。然而,从成本优化角度出发,如何在现有方案下集成新功能将是最具吸引力的设计策略。
目前,以太网方案中常见的通信技术为100/1000BaseT1S。尽管更高带宽的车规级技术不断推出,但如前文所述,功能的集成与融合正日益受到系统设计者的重视。因此,对更高网络带宽的需求逐渐转移到核心算力平台上的技术方案,例如共享内存和芯片内联技术等将成为高数据带宽的更佳解决方案。同时,Chiplet技术的兴起也将使得未来更多芯片内部的技术方案成为软件应用层网络通信需要讨论的重要议题之一。
在图2中,两种架构都将会持续保留CAN总线通信技术,而它也为了软件定义整车的需要升级下一代技术CAN XL, 其传输速率能够达到20Mbit/s,并支持以太网透传,和当前车载以太网常用协议,例如:TCP/IP,SOME/IP等.
当然现在基于以太网协议也推出了低速率的通信技术即10Base-T1s,通过共享物理总线的与其他多节点进行通信, 能够有效的把基于以太网软件协议扩展到更多控制器,然而硬件成本相对较高。
做到智能化、多样化的“千人千面”
在整车的动力域和底盘域,智能化升级正在不断推进。例如,在动力域中,随着车辆内部数据与外部环境数据的持续采集,云端算力平台能够帮助用户更精准地预测和判断系统策略。这在行驶能量管理分配和电池安全预测等方面带来了新的价值,显著提升了用户体验。
在智能化底盘与动力系统的升级迭代浪潮中,消费者的偏好各不相同,有些人更注重舒适性体验,而另一些人则希望获得运动性体验。过去的设计主要采用开环设计思路:车厂提供可选的调节设置选项,用户通过手动输入来改变配置。
然而,随着车辆数字化和智能化的推进,个性化需求将在独立用户账户体系下得到有效管理。不同用户(账户)下的驾驶习惯与功能设置等信息将被车辆记录和学习,并通过车内通信传输至车外用户云端系统。用户数据将被有效管理与反馈,通过用户自定义和AI算法的介入,能够在多场景和复杂条件下提前预测和判断用户的需求与想法。
因此,越来越多的车内系统需要通过面向服务的架构(SOA)延伸至车辆系统的每个角落,不仅限于主干网络中的系统服务,末端执行机构和传感器系统也可能需要提供原子信号服务数据。在当前多模态大语言模型(LLM)的应用场景中,更多原始数据将作为训练学习的输入信息,以产生更为精准的模型输出。
整车网络架构不仅需要考虑新功能的通信需求,还需关注新功能(如底盘线控化和更高阶无人驾驶)所涉及的安全性要求。这意味着对系统冗余设计的思考需要重新审视。在网络通信设计方面也同样如此,如何在满足新架构网络需求的同时保持系统成本的可控性。
升级加密技术、提升整车数据安全
随着车辆智能化和网络化的不断发展,行业对数据安全和网络通信安全的关注日益增强。2024年,国家将出台强制标准GB44495《汽车整车信息安全技术要求》,该标准对车外通信提出了明确的网络安全要求,并对未来车辆的网络安全提出了更高的期望。在该标准的7.2.9条款中,明确要求对车内网络区域的边界采取保护措施,包括物理隔离和逻辑隔离等手段。因此,随着车辆功能和技术的不断提升,确保全车网络的安全性在新设计中显得尤为重要,相关技术升级也亟需引起重视。
另一方面,量子计算的出现对汽车系统中常用的传统加密算法构成了重大威胁。量子计算研究的进步表明,它在并行计算和量子傅立叶变换 (QFT) 到比特缠绕和叠加方面具有强大的功能。但是,威胁级别因算法不同而不同。理论上, Shor 的算法有可能在量子计算机的多项式时间内完全打破非对称密钥加密,而 Grover 的量子算法在攻击对称密钥加密方面提供了相当快的速度。
NIST 于 2016 年启动了后量子算法竞赛后以找到量子安全算法来替代传统的非对称算法 (如 RSA ECC 和 DSA) ,而在 CNSA 2.0 中对国家安全系统的建议时间表如下:
到 2025 年,软件和固件签名立即开始过渡:支持并更倾向CNSA 2.0(XMS/LMS)。
到 2030 年,受限设备:支持并更倾向CNSA 2.0 (Kyber1024/Dilithium5)。
在全球高科技行业,苹果公司已经推出了 PQ3 ,这是一项尖端技术,通过采用基于点阵的加密技术来抵抗量子,确保未来的量子计算机对 iOS/iPad OS 17.4 和 Mac OS14.4 的潜在威胁,从而确保 iMessages 安全,确保未来安全。NVIDIA 在 H100 产品中引入了 CupQC SDK ,用于加速 后量子加密工作流程。
随着新加密算法的广泛引入,车内加密算法也将会采用更加安全的后量子加密算法,当前已经标准确认的后量子加密算法又将需要更多数据量交互的需求,这样对于在车内的不同层级的重要控制器单元都需要提高加密协议数据量,因而在设计加密协议时更高带宽总线方案也考虑因素之一。
在国内市场,汽车正经历从电动化向智能化的快速转型,整车电子电气架构也在不断优化以适应这一趋势。新技术和功能的引入要求解决方案不仅具备向下兼容性,还需具备持续的可扩展性,以满足未来发展的需求。在这一背景下,基于新型高算力芯片的解决方案变得愈发重要。同时,基于异构计算核心的软件与整车嵌入式系统通过先进的网络技术进行连接。更灵活的网络通信协议和更高的物理带宽能力将支持日益多样化的整车解决方案,进一步推动智能驾驶、车网联和人工智能等新兴应用的发展,从而显著提升车辆的智能化水平。
-
BlackBerry展望2025年汽车行业发展趋势2025-02-28 1096
-
Gartner发布2025年汽车行业重要趋势2025-02-07 1406
-
新能源汽车行业的未来发展趋势2024-01-12 2279
-
推动汽车行业的流程改进2022-11-24 1494
-
2019年推动汽车行业发展的主要趋势2022-11-01 575
-
请问超声波人体检测传感器如何助力汽车行业稳步发展?2021-06-16 1694
-
电子技术在现代汽车上的应用及发展趋势是什么2021-05-17 3965
-
为什么NOR FLASH仍是汽车行业的优选看了就知道2021-01-05 1548
-
未来智能汽车行业的发展趋势如何?2020-07-20 2409
-
电子元器件行业对汽车电动化发展的影响2018-09-10 4249
-
您看好电动汽车的未来发展趋势吗?2017-04-26 7334
-
汽车电子电气架构设计及优化措施2016-10-18 5368
-
汽车行业空调行业检漏用快速连接器2015-06-11 5792
-
汽车行业PCB测试程序2013-04-30 3584
全部0条评论

快来发表一下你的评论吧 !
