

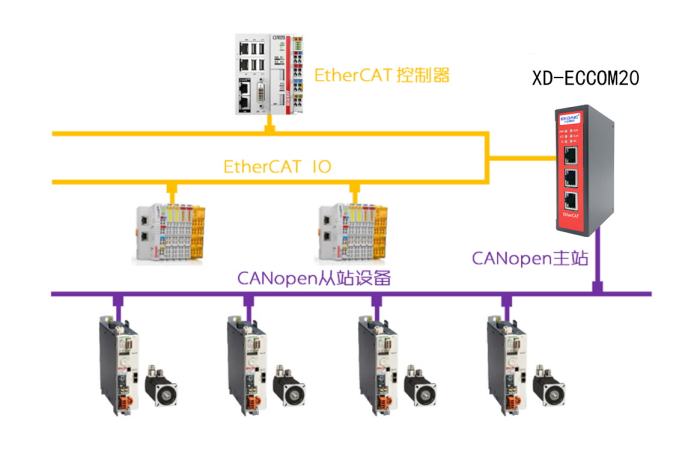
EtherCAN转CANopen网关控制伺服电机
电子说
描述
EtherCAN转CANopen网关控制伺服电机

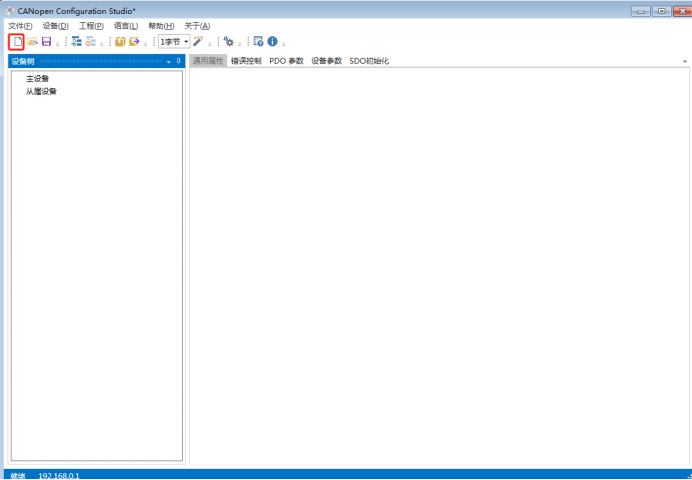
1、打开CANopen Configuration Studio配置软件,创建一个新工程:
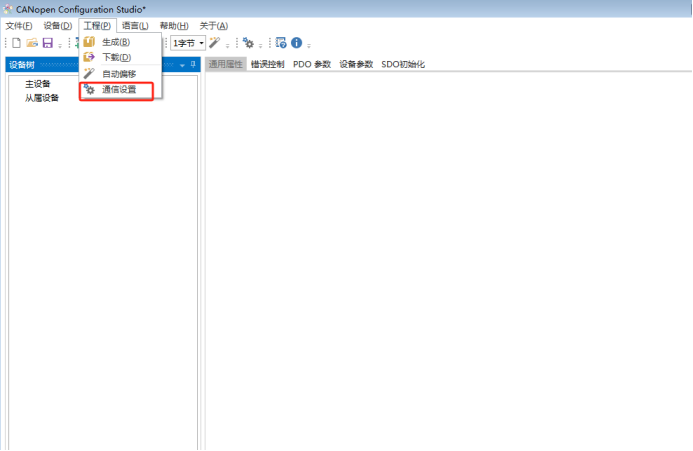
2、点击工程找到通信设置:
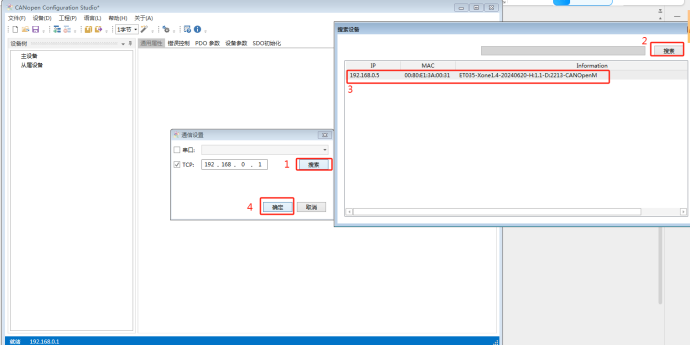
3、点击搜索双击搜索到的设备点击确认:
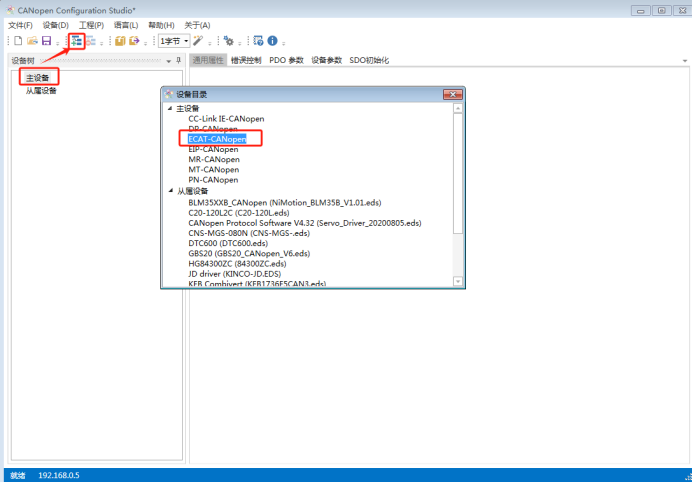
4、点击添加主站设备,在设备列表选中主站设备:
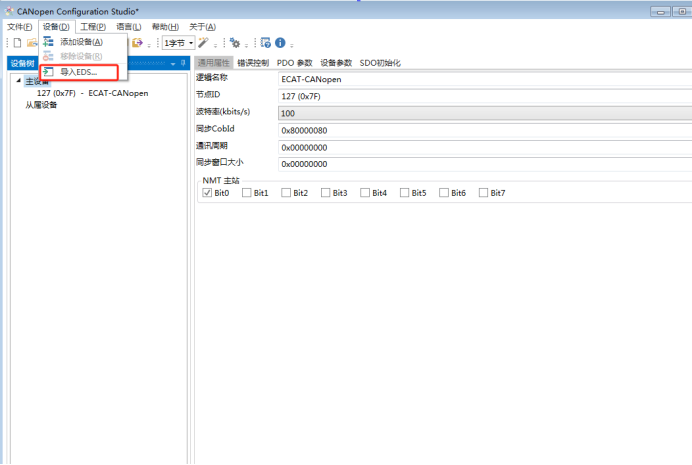
5、点击设备找到“导入EDS文件”
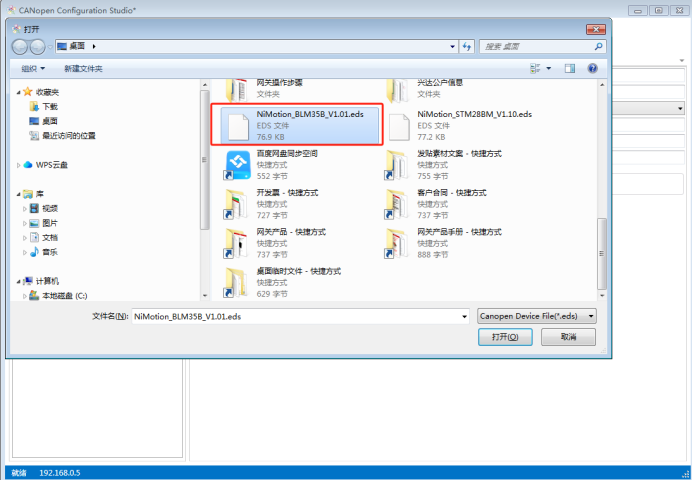
6、选择伺服电机描述文件点击打开:
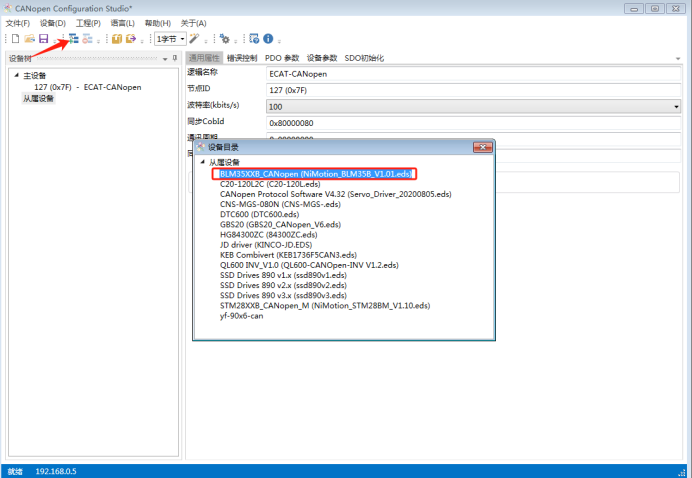
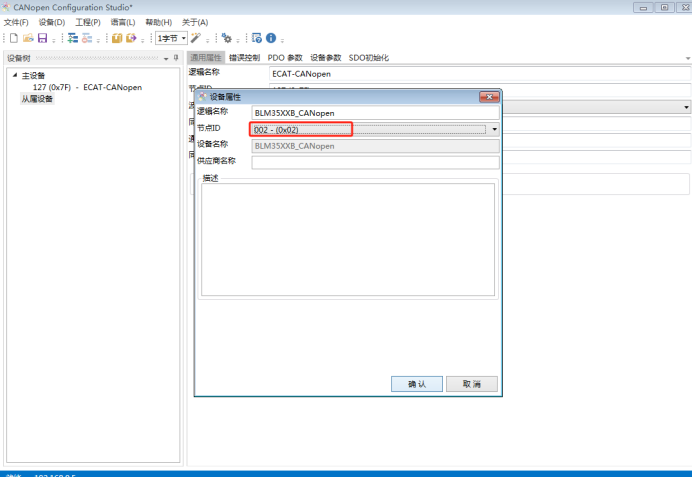
7、点击添加从站设备在设备目录找到点击描述文件:
8、选择电机节点ID点击确认:
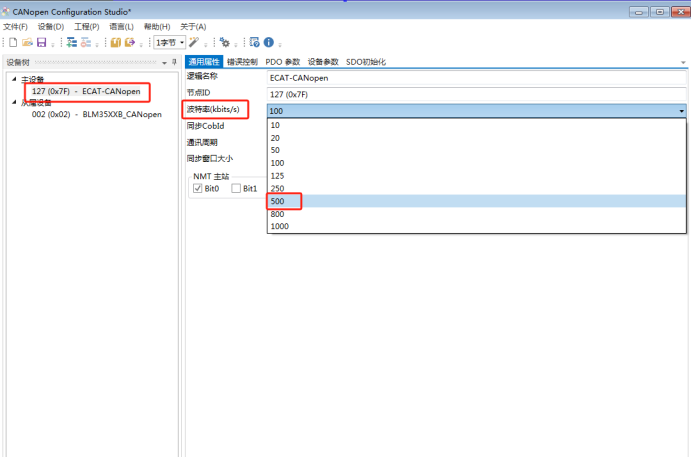
9、点击主设备在通用属性设置电机波特率:
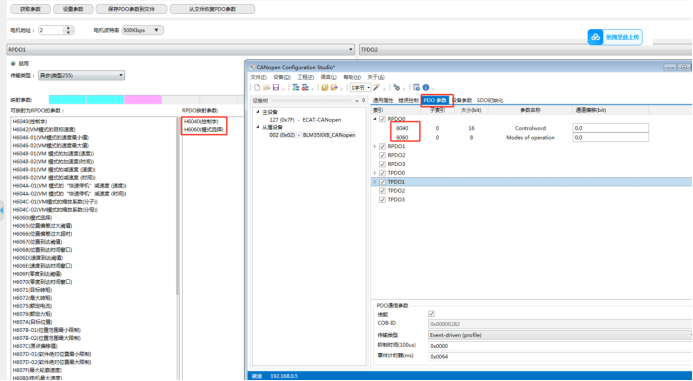
10、点击从站设备PDO参数里添加对应的PDO:
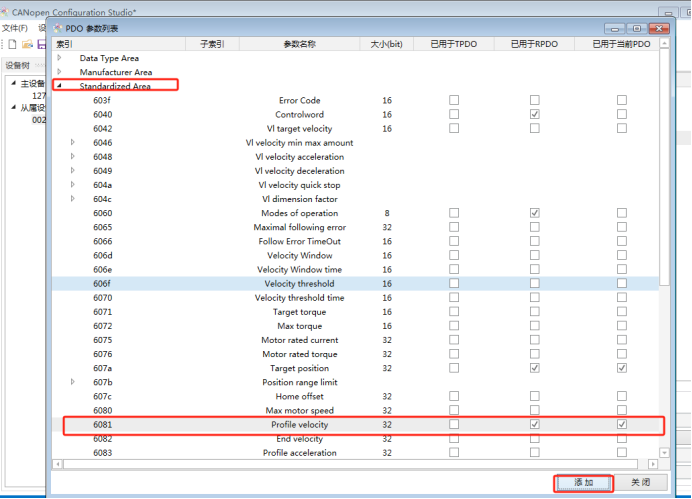
11、右击打开添加:
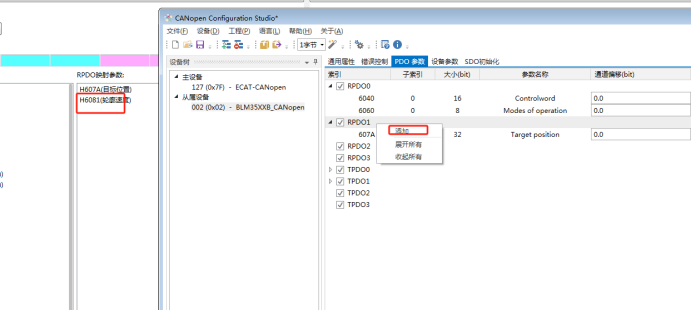
12、找到对应的PDO指令点击添加:
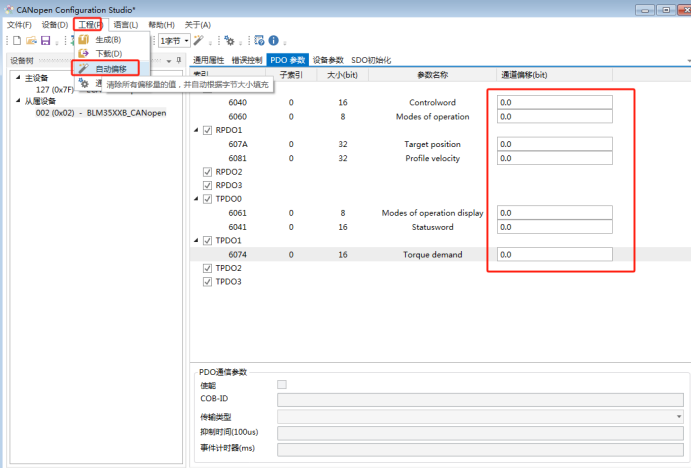
13、需要的指令添加完成以后打开工程点击自动偏移:
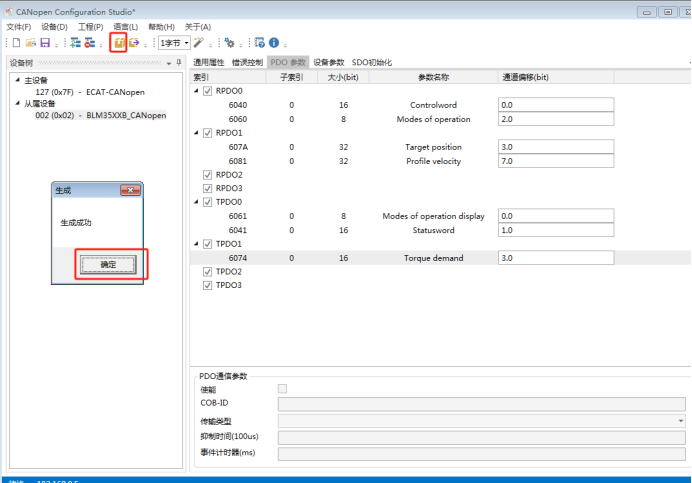
14、设置完成后点击生成:
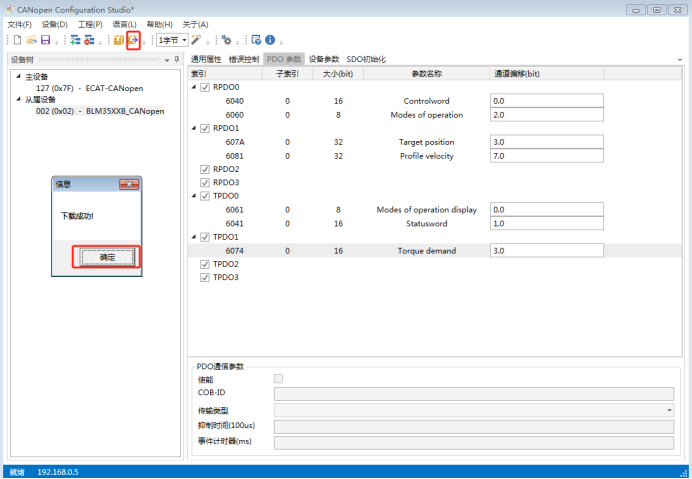
15、生成成功后点击下载:
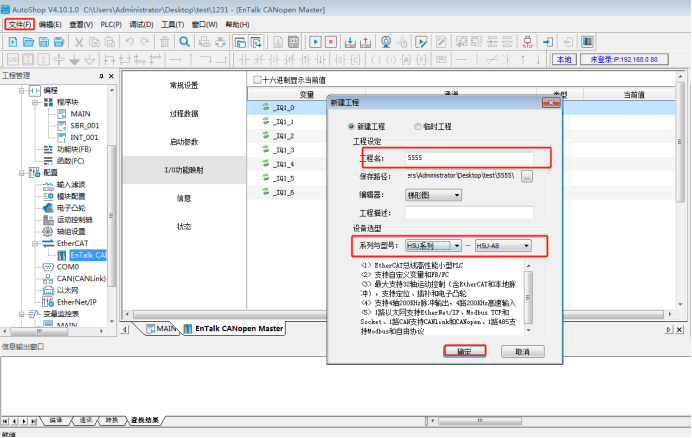
16、打开汇川plc编程软件,在文件找到创建新工程,给工程命名选择plc型号:
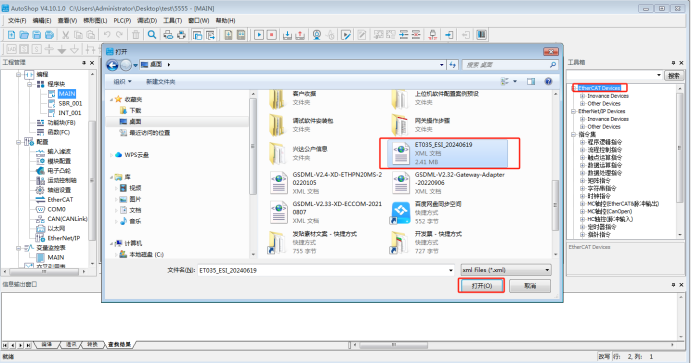
17、在右侧工具箱右击EtherCAT Devices导入XML文件,选择XML文件点击打开:
18、导入XML文件成功后重启软件,重新打开软件后找到安装好的XML文件双击添加:

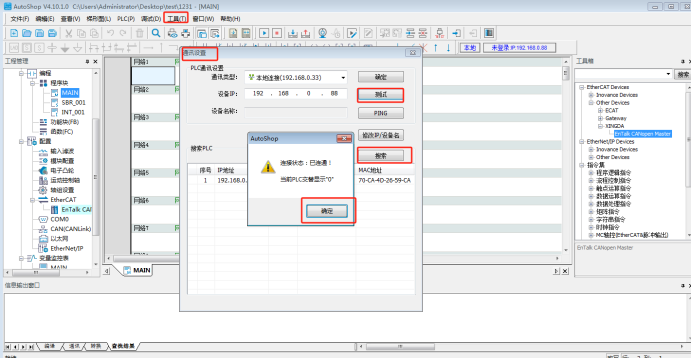
19、在工具找到通讯设置,点击搜索选择搜索到的设备点击测试:
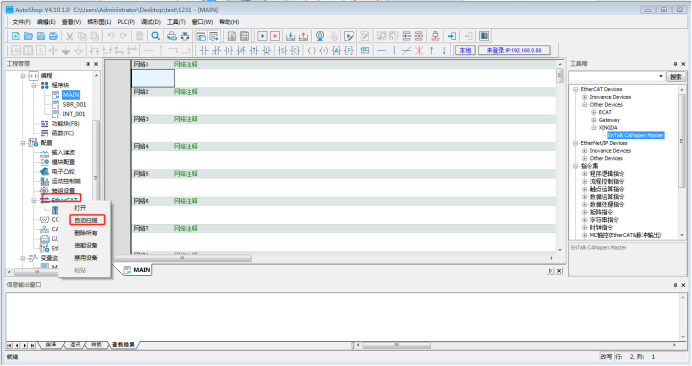
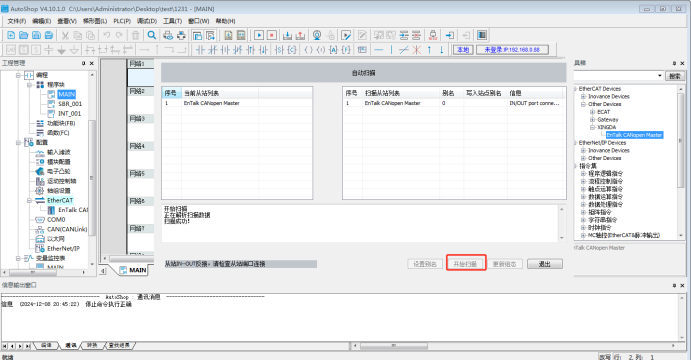
20、右击EtherCAT找到自动扫描并打开:
21、进入自动扫描后点击开始扫描:
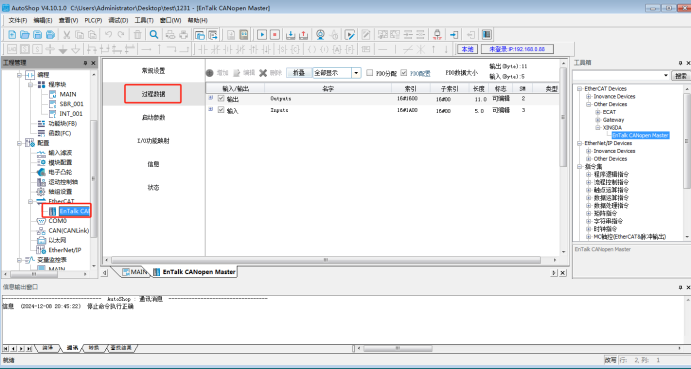
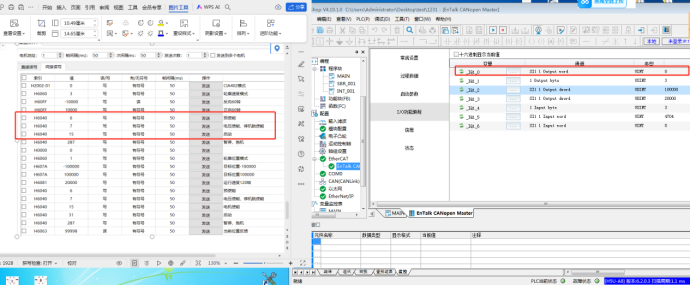
22、双击进入从站设备,点击过程对象进行添加PDO映射:
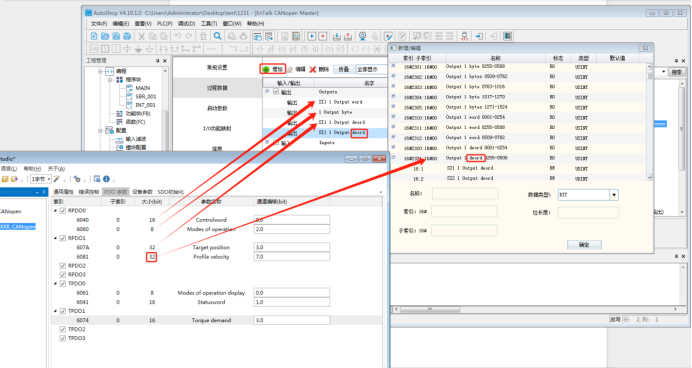
23、根据PDO这边的位长度添加相对应的数据类型,比如下图所示32个为对应4个字节,4个字节对应2个字所以下图我们添加了一条dword(双字),根据这样依次添加对应的类型:
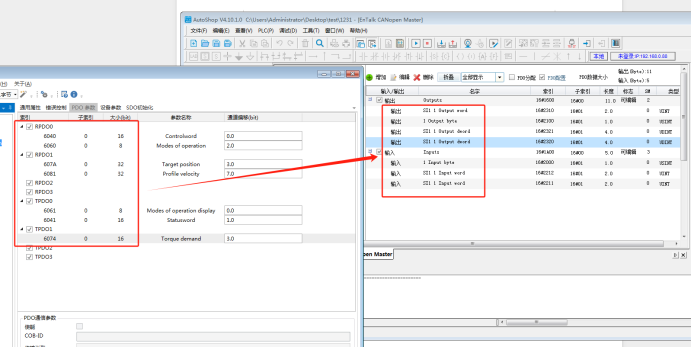
24、添加完成后如下图所示:
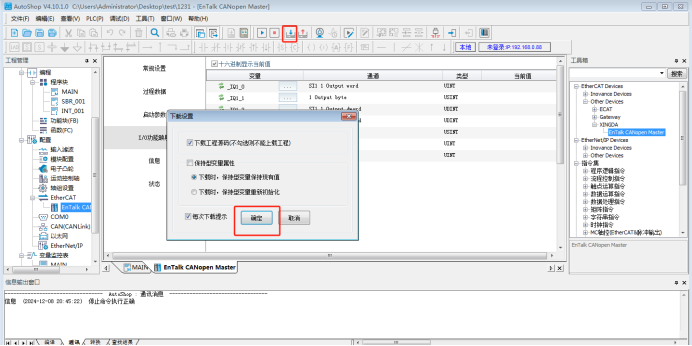
25、设置完成点击下载:
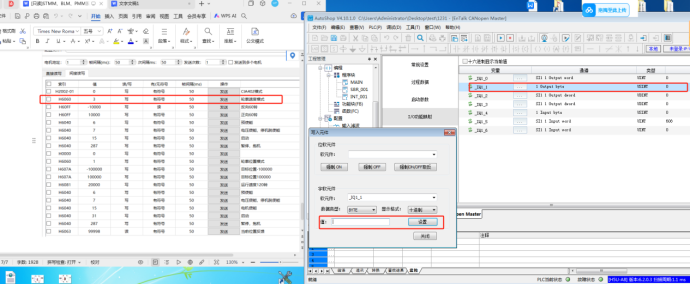
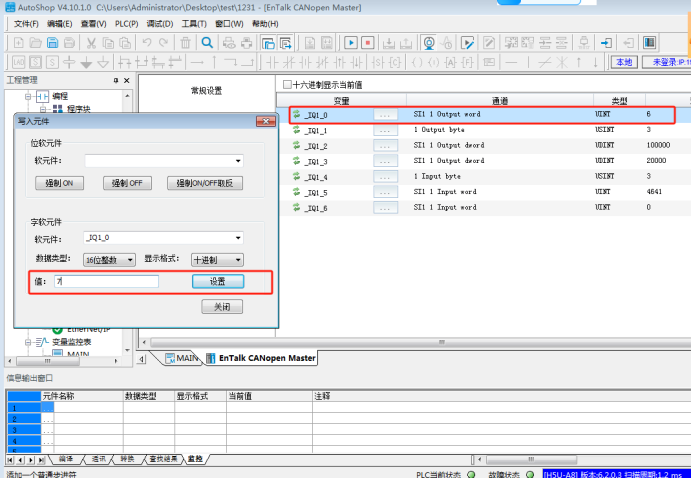
26、下载完成点击在线监控,进入I/O功能映射先给模式选择给3让电机进入速度轮廓模式:
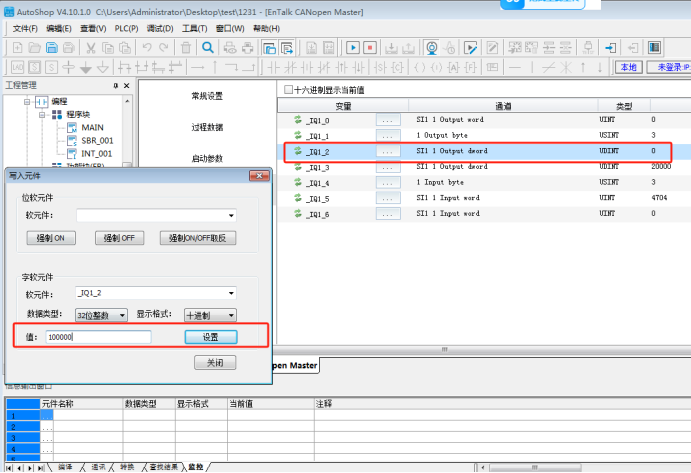
27、设定电机轮廓速度:
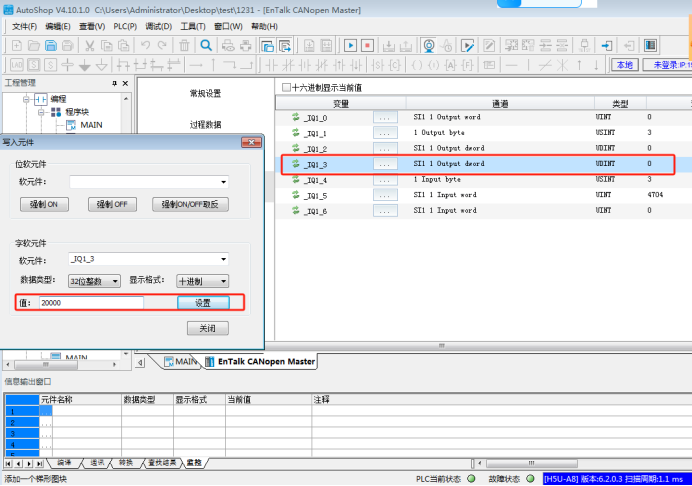
28、设置电机目标位置:
29、最后在第一条指令先给入6(预使能):
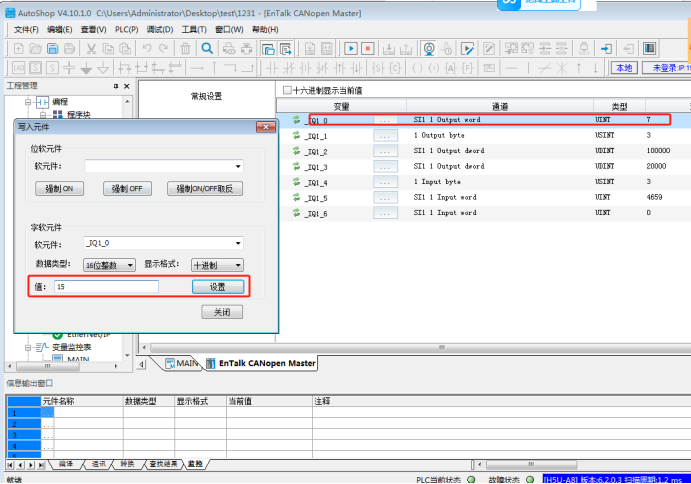
30、给入6以后再写入7(电压使能,停机脱使能):
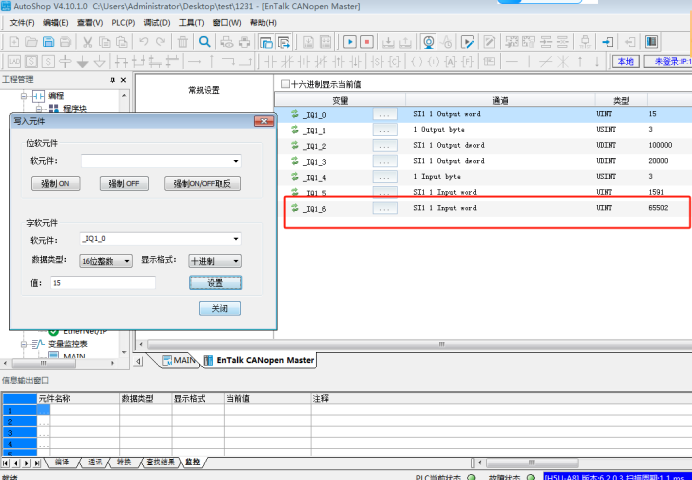
31、最后写入15(启动)让电机启动:
32、写入15(启动)以后电机成功启动:
审核编辑 黄宇
-
EtherCAT转CANOPEN网关+伺服驱动器,药品包装线精度这样炼成2026-04-08 252
-
CANOpen转PROFINET网关连接低压伺服系统2025-03-24 1268
-
EtherCAN转CANopen网关,轻松搞定通信难题!2025-03-22 904
-
通过CANopen转Modbus TCP网关的伺服系统2024-01-02 1195
-
耐用通信Ethercat转canopen网关在钢铁行业的应用案例2023-12-25 1290
-
ModbusTCP转CanOpen网关助力工控行业2023-12-11 3447
-
CanOpen转Profinet网关连接SD100伺服驱动器与PLC配置案例2023-09-01 683
-
Canopen转Profinet网关连接台达伺服2023-07-05 2117
-
Profinet转Canopen网关连接MOTEC伺服2023-04-17 591
-
Profinet转Canopen网关连接MOTEC伺服配置案例2023-04-15 1912
-
通过Profinet转CanOpen网关连接步科电机2023-04-11 960
-
Canopen转Profinet网关连接台达伺服配置案例2023-03-15 803
全部0条评论

快来发表一下你的评论吧 !
