

基于Atmega128单片机设计的嵌入式控制器
控制/MCU
描述
采用Atmega128单片机设计的嵌入式控制器,模拟量输入通道用Atmega128片内A/D转换器,输出用AD421 D/A转换器,数字量I/O通道配置高速先耦器件.用LCCavr编译器修改OSTaskStklnit()函数及其相关文件,定义数据类型等以实现MICroC/OS-Ⅱ的移植.
1 引言
嵌入式控制器是机电设备实现自动化的核心部件。故以大型机电设备为控制对象,利用高性能Atmega 128微处理器, 设计了具有现场总线(CANBUS)网络通信和一定通用性的多功能嵌入式智能控制器。
2 硬件设计
系统的硬件结构如图1。
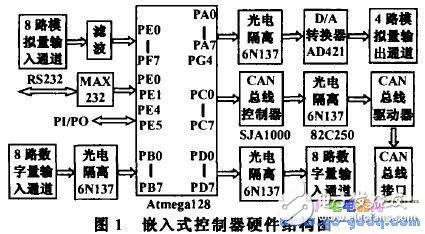
本控制器的核心采用64管脚TQFP封装的Atmega128芯片,具有53个可编程的I/O引脚,片内集成有128KB闪存、4KB EEPROM 和4KBSRAM,适合I/O通道和存储空间的需求。
(1)模拟量输入通道
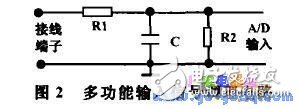
模拟量输入通道采用Atmega128片内的8通道1O位A/D转换器。其信号输入部分可以根据具体的信号情况选择使用图2所示的多功能输入信号调理电路。在电压信号输入时可以由R1和C构成低通滤器(R2开路);R1和R2可以构成输入信号分压电路(电容c开路);对于4-20mA电流输入信号,R2使用250Q的精密电阻即可变换为1~5V的信号(R1短路、C开路)。在电路版上设计有对应多功能信号调理电路焊位元件的位置,可根据需要白行选择使用。8路模拟量输入部分占用的是ATMEGA128的PF0~PF7。
(2)模拟量输出通道
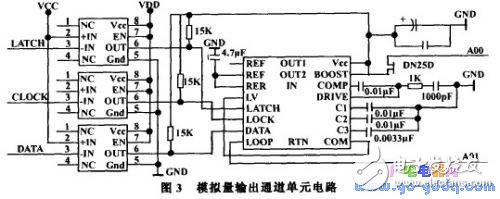
模拟量输出通道单元电路设计方案如图3。D/A转换器采用AD公司的AD421,它是一种单片低功耗、高精度的电流输出型DAC芯片,4~20mA 的输出可以驱动标准的执行元件。该芯片的数字接口为标准HART (三线)或其它FSK协议,DAC为16位分辨率,单调性输出。采用回路供电方式,内含电源调整器为本身和外围器件供电。在工业控制中,通常输入量要多于输出量,所以只设计Atmega128的PAO~PA7,PE2、PE3、PE6、PG4引脚通过4个光电隔离器(6N137)与4个AD421相连,构成4路模拟量输出。
(3)数字量输入/输出通道
数字量I/O通道各配置8路高速光耦隔离通道。光耦器件选6N137,其开关延迟tpd仅75ns,而普通光耦器件开关延迟有3~6μs。I/O通道接口安排在Atmega128的PB0~PB7、PD0~PD7。
(4)CAN总线接口
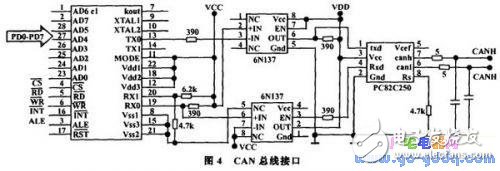
选择独立的CAN通信控制器SJA1000、CAN总线驱动器82C250和高速光电耦合器6N137与微控制器Atmega128进行设计。微处理器Atmega128负责SJA1000的初始化,通过控制SJA1000实现数据的接收和发送等通信任务。
CAN总线接口如图4。SJA1000的AD0~AD7连接到Atmega128的PC 口,CS连接到Atmega128的PG3。PG3为0时CPU片外存储器地址选中SJA1000,CPU通过地址可对SJA1000执行读/写操作。SJA1000的RD、WE、ALE与Atmega128的引脚相连,INT 接Atmega128的PE7,Atmega128可通过中断方式访问SJA1000。
(5)与PC机的串行通信
考虑到智能控制节点要接收从RS232串口来的数据,因而采用了Atmega128的串行口进行中断接收,所用的引脚是PE0、PE1。通过MAX232进行数据传输。
(6)脉冲输入脉冲输出
由于输入信号的多样性,增加了PI/PO部分。
3 Micro C/OS—II的移植
Micro C/OS—II移植到Atmega128上,需要修改OS_CPU.H,OS_CPU_A.S和OS_CPU_C.C三个与其相关的文件。其中OS—CPU.H主要完成的是数据类型、堆栈单位、堆栈增长方向的定义。相关的数据类型定义:
typedef unsigned char BOOLEAN;
typedef unsigned char INT8U; //无符号8位数
typedef signed char INT8S; //带符号8位数
typedef unsigned int INTI6U; //无符号l6位数
typedef signed int INTl6S; //带符号l6位数
typedef unsigned long INT32U; //无符号32位数
typedef signed long INT32S; //带符号32位数
typedef float FP32; //单精度浮点数
堆栈单位的定义:
typedef unsigned char OS_STK;//堆栈入口宽度为8位
状态寄存器的定义:
typedef unsigned char OS_ CPU_SR;//定义状态寄存器为8位
堆栈增长方向的定义:
#define OS_STK_GROW TH 1;//AVR堆栈由高地址向低地址增长
0S_CPU_C.C 文件主要包括任务堆栈初始化和实现操作系统规定的几个Hook函数。其中移植需要的Hook函数如下:
OSTaskCreateHook();OSTaskDelHook()
OSTaskldleHook();OSTaskStateHook()
OSTaskSwHook();oSTCBInitHook()
OSTimeTickHook()
移植所需的OS— CPU-A.s中的函数有:
OS_CPU_SR_SAVE();OS_CPU_SR_RESTORE()
OSStartHightRdy();OSCtxSw0
OSINTCtxSw();OSTicklSR0
应用移植后的嵌入式操作系统对控制器进行验证,选取PB0~PB7作为输入,PD0~PD7作为输出,实现了二极管的发光演示。
部分源代码如下:
static void LED_Toggle(INT8U led)
{
#if OS_CRITICAL_M ETHOD = = 3
//AlLOCate storage for CPU status register
OS_CPU_SR cpu_sr;
#endif
OS_ENTER_CRITICAI ():
switck(1ed)
{casc 1:PORTD⌒=0x01;break;
case 2:PORTD⌒= 0x02;break;
case 3:PORTD⌒= 0x04;break;
case 4:PORTD⌒= 0x08;break;
}
OS_EXIT_CRITICAl ();
}
4 结语
应用Atmega128设计的嵌入式控制器能完成多功能数据采集与控制,CAN总线和RS232通信,移植的嵌入式实时操作系统可增强实时多任务信息处理的能力。并通过实验对本设计进行了验证。
-
如何利用atmega128设计智能台灯控制器?2022-01-24 1130
-
基于Atmega128嵌入式控制器该怎么设计?2019-08-30 1714
-
使用ATmega128单片机设计数码管秒表的程序和工程文件免费下载2019-07-31 1663
-
AVR单片机Atmega128在FPGA配置的应用和对EPF10K10软硬件设计原理2018-10-26 1742
-
ATmega128单片机的内部资源、工作原理和硬件电路设计的资料免费下载2018-09-21 2727
-
基于ATmega128单片机的汽车太阳能充电控制器_秦俊2017-03-19 1193
-
AVR单片机Atmega128在FPGA配置中的运用2016-10-11 1321
-
ATmega128几个常用程序例子2015-11-03 1694
-
《ATmega128单片机入门与提高》光盘.rar2012-08-16 68760
-
基于ATMEGA128单片机的程控滤波器2012-08-06 2096
-
基于双ATmega128的安检力学试验机设计2010-11-22 754
-
采用ATMEGA128单片机结合CPLD 实现了对VGA显示2010-02-08 1317
-
基于AVR单片机的多任务嵌入式Internet 系统设计2009-08-05 531
全部0条评论

快来发表一下你的评论吧 !
