

【北京迅为】iTOP-RK3568开发板鸿蒙OpenHarmony系统南向驱动开发实操-HDF驱动配置UART
描述
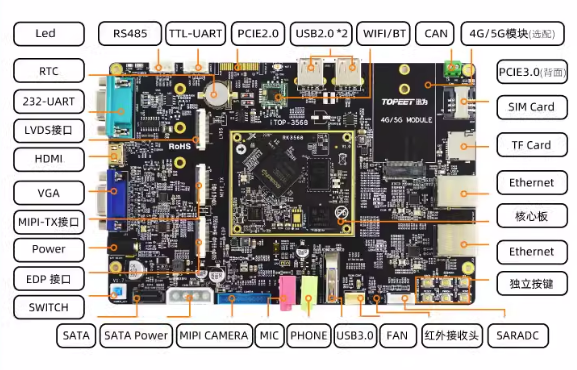
瑞芯微RK3568芯片是一款定位中高端的通用型SOC,采用22nm制程工艺,搭载一颗四核Cortex-A55处理器和Mali G52 2EE 图形处理器。RK3568 支持4K 解码和 1080P 编码,支持SATA/PCIE/USB3.0 外围接口。RK3568内置独立NPU,可用于轻量级人工智能应用。RK3568 支持安卓 11 和 linux 系统,主要面向物联网网关、NVR 存储、工控平板、工业检测、工控盒、卡拉 OK、云终端、车载中控等行业。
【本文摘自】【北京迅为】iTOP-RK3568OpenHarmony系统南向驱动开发
【相关视频】OpenHarmony学习开发系列教程(第1期 北向基础篇一)
OpenHarmony学习开发系列教程(第2期 南向基础篇一)
第6章 实操-HDF驱动配置UART
6.1 修改HCS配置
对于不同的平台,需要在对应的平台目录修改对应的hcs文件,接下来示例为在rk3568下新增uart4 uart9 uart7的修改方法。
修改vendor/hihope/rk3568/hdf_config/khdf/device_info/device_info.hcs文件,device_info.hcs中添加以下内容:
device3 :: deviceNode {
policy = 2;
permission = 0644;
priority = 40;
moduleName = "HDF_PLATFORM_UART";
serviceName = "HDF_PLATFORM_UART_4";
deviceMatchAttr = "rockchip_rk3568_uart_4";
}
device4 :: deviceNode {
policy = 2;
permission = 0644;
priority = 40;
moduleName = "HDF_PLATFORM_UART";
serviceName = "HDF_PLATFORM_UART_7";
deviceMatchAttr = "rockchip_rk3568_uart_7";
}
device5 :: deviceNode {
policy = 2;
permission = 0644;
priority = 40;
moduleName = "HDF_PLATFORM_UART";
serviceName = "HDF_PLATFORM_UART_9";
deviceMatchAttr = "rockchip_rk3568_uart_9";
}
在配置过程中要注意以下几点:
1 device3,device4,device5是自定义的,可以根据实际情况修改
2 policy表示服务策略,取值为0时,表示不发布服务,取值为1时表示向内核态发布服务,取值为2时表示向内核用户态发布服务
3 moduleName的值要与驱动实现的HdfDriverEntry结构体中的moduleName相同。
4 deviceMatchAttr的值表示驱动的私有配置信息
5 serviceName表示服务名称,服务加载成功之后会在开发板的/dev/目录下生成节点。例如HDF_PLATFORM_UART_9后面跟着的数据9是UartOpen()的端口号
6.2 配置rk3568_uart_config.hcs
修改vendor/hihope/rk3568/hdf_config/khdf/platform/rk3568_uart_config.hcs文件,添加如下内容,如下所示:
device_uart_0x0004 :: uart_device {
num = 4;
match_attr = "rockchip_rk3568_uart_4";
}
device_uart_0x0007 :: uart_device {
num = 7;
match_attr = "rockchip_rk3568_uart_7";
}
device_uart_0x0009 :: uart_device {
num = 9;
match_attr = "rockchip_rk3568_uart_9";
}
在上面的配置中需要注意以下几点:
1 device_uart_0x0004中的后缀“0x0004”是串口编号。
2 num 与driver_name值“ttyS”组成驱动设备名,例如ttyS4。UartOpen函数参数port,则表示上述uart设备排列序号,比如num=4 的UartOpen函数port=4。
3 match_attr的名称必须是rockchip_rk3568_uart_x,和device_info.hcs中要写一样。
6.3 Openharmony UART平台驱动
在drivers/hdf_core/adapter/khdf/linux/platform/uart/uart_adapter.c 中编写了对接Linux UART驱动的相关代码,这部分不需要大家进行修改,感兴趣的话可以自己研究下uart_adapter.c文件。
6.4 UART应用开发
6.4.1 UART驱动API接口介绍
UART驱动API接口如下所示,具体的API详见drivers/hdf_core/framework/include/platform/uart_if.h文件。

UartOpen
在使用UART进行通信时,首先要调用UartOpen获取UART设备句柄,该函数会返回指定端口号的UART设备句柄。函数原型如下所示:
DevHandle UartOpen(uint32_t port);
其中,参数port是UART设备号。UartOpen返回值为NULL表示获取UART设备句柄失败,正常情况下返回UART设备句柄。
假设系统重的UART端口号为4,获取该UART设备句柄的示例如下所示
DevHandle handle = NULL; // UART设备句柄
uint32_t port = 4; // UART设备端口号
handle = UartOpen(port);
if (handle == NULL) {
HDF_LOGE("UartOpen: open uart_%u failed!\n", port);
return;
}
UartSetBaud
在通信之前,需要设置UART的波特率,函数原型如下所示:
int32_t UartSetBaud(DevHandle handle, uint32_t baudRate);
其中,参数handle表示UART设备句柄,baudRate表示待设置的波特率值。UartSetBaud返回值为HDF_SUCCESS表示波特率设置成功,返回值为负数表示UART设置波特率失败。
UartGetBaud
设置UART的波特率后,可以通过获取波特率接口来查看UART当前的波特率。函数原型如下所示:
int32_t UartGetBaud(DevHandle handle, uint32_t *baudRate);
其中,参数handle表示UART设备句柄,baudRate表示待设置的波特率值。UartSetBaud返回值为HDF_SUCCESS表示获取波特率成功,返回值为负数表示UART获取波特率失败。
UartSetAttribute
在通信之前,需要设置UART的设备属性。函数原型如下所示:
int32_t UartSetAttribute(DevHandle handle, struct UartAttribute *attribute);
其中,handle表示UARt设备句柄,attribute表示待设置的设备属性。UartSetAttribute返回值为HDF_SUCCESS表示UART设置属性成功,返回值为负数表示UART设置设备属性失败。
UartGetAttribute
设置UART的设备属性后,可以通过获取设备属性接口来查看UART当前的设备属性。函数原型如下所示:
int32_t UartGetAttribute(DevHandle handle, struct UartAttribute *attribute);
其中,handle表示UART设备句柄,attribute表示接收UART设备属性的指针。UartGetAttribute返回值为HDF_SUCCESS表示UART获取属性成功,返回值为负数表示UART获取设备属性失败。
UartSetTransMode
在通信之前,需要设置UART的传输模式。函数原型如下所示:
int32_t UartSetTransMode(DevHandle handle, enum UartTransMode mode);
其中,handle表示UART设备句柄,mode表示待设置的传输模式。UartSetTransMode返回值为HDF_SUCCESS表示UART设置传输模式成功,返回值返回负数表示UART设置传输模式失败。
UartWrite
向UART设备写入指定长度的数据。函数原型如下所示:
int32_t UartWrite(DevHandle handle, uint8_t *data, uint32_t size);
其中,handle表示UART设备句柄,data表示待写入数据的指针,size表示待写入数据的长度。
UartWrite返回值为HDF_SUCCESS表示UART写数据成功,返回值为负数表示UART写数据失败。
UartRead
从UART设备中读取指定长度的数据,函数原型如下所示:
int32_t UartRead(DevHandle handle, uint8_t *data, uint32_t size);
其中,参数handle表示UART设备句柄,data表示接收读取数据的指针,size表示待读取数据的长度。UartRead返回值为非负数表示UART读取到的数据长度,返回值为负数,表示UART读取数据失败。
UartClose
UART通信完成之后,需要销毁UART设备句柄,函数原型如下所示:
void UartClose(DevHandle handle);
其中,参数handle表示UART设备句柄。
6.4.2 编写应用测试APP
使用UART的一般流程如下所示:
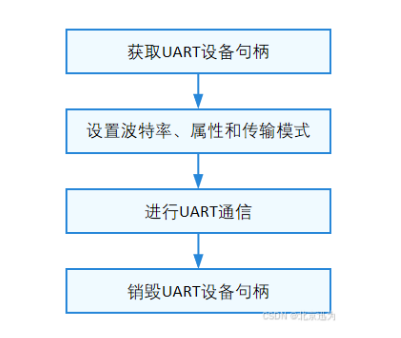
接下来编写应用测试文件uart_test.c,完整代码如下所示:
#include "stdio.h"
#include "stdlib.h"
#include "unistd.h"
#include "hdf_base.h"
#include "hdf_io_service.h"
#include "hilog/log.h"
#include "uart_if.h" // 假设这个头文件包含了所有UART相关函数的声明和宏定义
#define STRING_MAXSIZE 100
#define HDF_SUCCESS 0
// 假设这些宏在uart_if.h中定义
#ifndef PRINT_ERROR
#define PRINT_ERROR(...) fprintf(stderr, __VA_ARGS__)
#endif
#ifndef PRINT_INFO
#define PRINT_INFO(...) printf(__VA_ARGS__)
#endif
int main(int argc, char* argv[])
{
DevHandle handle = NULL;
struct UartAttribute attribute;
int32_t ret = 0;
uint8_t wbuff[STRING_MAXSIZE] = "HelloWorld";
uint8_t rbuff[STRING_MAXSIZE] = {0}; // 初始化接收缓冲区为0
uint32_t m_uart_port = atoi(argv[1]); // UART端口的标识符
uint32_t m_uart_baudrate = 115200; // UART的波特率
// 初始化UART属性
attribute.dataBits = UART_ATTR_DATABIT_8; // UART传输数据位宽,一次传输8个bit
attribute.parity = UART_ATTR_PARITY_NONE; // UART传输数据无校检
attribute.stopBits = UART_ATTR_STOPBIT_1; // UART传输数据停止位为1位
attribute.rts = UART_ATTR_RTS_DIS; // UART禁用RTS
attribute.cts = UART_ATTR_CTS_DIS; // UART禁用CTS
attribute.fifoRxEn = UART_ATTR_RX_FIFO_EN; // UART使能RX FIFO
attribute.fifoTxEn = UART_ATTR_TX_FIFO_EN; // UART使能TX FIFO
// 打开UART设备
handle = UartOpen(m_uart_port);
if (handle == NULL) {
PRINT_ERROR("UartOpen: open uart port %u failed!\n", m_uart_port);
return -1;
}
PRINT_INFO("UartOpen successful and uart port = %u\n", m_uart_port);
// 设置UART波特率
ret = UartSetBaud(handle, m_uart_baudrate);
if (ret != HDF_SUCCESS) {
PRINT_ERROR("UartSetBaud: set baud failed, ret %d\n", ret);
goto ERR;
}
PRINT_INFO("UartSetBaud successful and uart baudrate = %u\n", m_uart_baudrate);
// 设置UART设备属性
ret = UartSetAttribute(handle, &attribute);
if (ret != HDF_SUCCESS) {
PRINT_ERROR("UartSetAttribute: set attribute failed, ret %d\n", ret);
goto ERR;
}
PRINT_INFO("UartSetAttribute successful\n");
// 获取UART设备属性(可选)
ret = UartGetAttribute(handle, &attribute);
if (ret != HDF_SUCCESS) {
PRINT_ERROR("UartGetAttribute: get attribute failed, ret %d\n", ret);
goto ERR;
}
PRINT_INFO("UartGetAttribute successful\n");
// 设置UART传输模式为阻塞模式
ret = UartSetTransMode(handle, UART_MODE_RD_BLOCK);
if (ret != HDF_SUCCESS) {
PRINT_ERROR("UartSetTransMode: set trans mode failed, ret %d\n", ret);
goto ERR;
}
PRINT_INFO("UartSetTransMode successful\n");
// 向UART设备写入数据
ret = UartWrite(handle, wbuff, (uint32_t)strlen((char *)wbuff));
if (ret != HDF_SUCCESS) {
PRINT_ERROR("UartWrite: write data failed, ret %d\n", ret);
goto ERR;
}
PRINT_INFO("UartWrite successful and wbuff = %s\n", wbuff);
// 从UART设备读取数据
do{
ret = UartRead(handle, rbuff, STRING_MAXSIZE);
if (ret < 0) {
PRINT_ERROR("UartRead: read data failed, ret %d\n", ret);
goto ERR;
}
sleep(1);
} while (!ret);
rbuff[ret] = '\0'; // 确保字符串以null结尾(如果读取的是文本数据)
PRINT_INFO("UartRead successful and rbuff = %s\n", rbuff);
ERR:
// 关闭UART设备句柄(确保在handle非空时关闭)
if (handle != NULL) {
UartClose(handle);
}
return ret;
}
接下来编写应用APP的GN文件BUILD.gn,代码内容如下所示:
HDF_FRAMEWORKS = "//drivers/hdf_core/framework"
HDF_ADAPTER = "//drivers/hdf_core/adapter"
import("//build/ohos.gni")
import("$HDF_ADAPTER/uhdf2/uhdf.gni")
print("demos: compile uart_test")
ohos_executable("uart_test"){
sources = ["uart_test.c"]
include_dirs = [
"$HDF_FRAMEWORKS/include",
"$HDF_FRAMEWORKS/include/core",
"$HDF_FRAMEWORKS/include/osal",
"$HDF_FRAMEWORKS/include/platform",
"$HDF_FRAMEWORKS/include/utils",
"$HDF_ADAPTER/uhdf2/ipc/include",
"$HDF_ADAPTER/uhdf2/osal/include",
"//base/hiviewdfx/hilog/interfaces/native/innerkits/include",
"//third_party/bounds_checking_function/include",
]
external_deps = [
"c_utils:utils",
"hdf_core:libhdf_platform",
"hdf_core:libhdf_utils",
"hilog:libhilog",
]
cflags = [
"-Wall",
"-Wextra",
"-Werror",
"-Wno-format",
"-Wno-format-extra-args",
]
part_name = "demos"
install_enable = true
}
6.5 编译源码
重新编译Openharmony4.1源码,如下所示:
./build.sh --product-name rk3568 --ccache
或者单独编译部件
./build.sh --product-name rk3568 --build-target demos --ccache
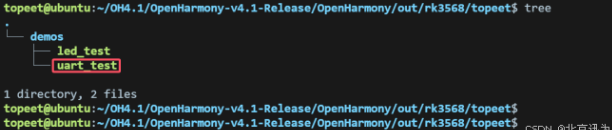
编译之后,在源码out/rk3568/topeet目录下生成编译产物,如下图所示:
6.6 UART测试
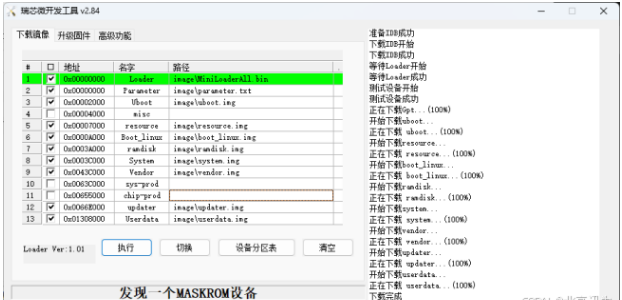
将编译好的镜像全部进行烧写,镜像在源码根目录out/rk3568/packages/phone/images/目录下。
烧写完成之后,连接串口工具,本小节将要测试串口9,对应的设备节点是/dev/HDF_PLATFORM_UART_9。
作者使用usb转TTL(需要自行准备)来进行测试,如下图所示:

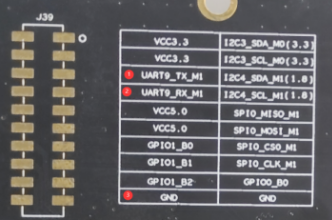
串口9在开发板底板的背面,如下图所示,USB转TTL的RXD要使用导线连接到开发板串口9的UART9_TX_M1,USB转TTL的TXD要使用导线连接到开发板串口9的UART9_RX_M1,USB转TTL的地接到GND。
在电脑上打开串口助手,选择串口4对应的串口号和波特率,注意:默认波特率为115200!
打开串口,如下图所示:
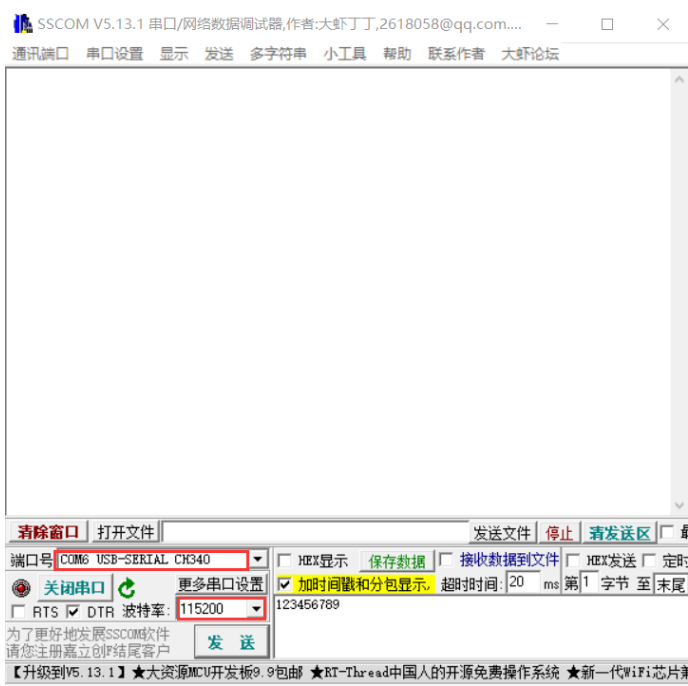
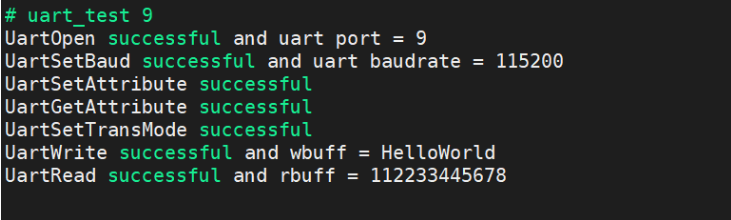
输入以下命令运行测试程序发送数据和接收数据,发送的数据为112233445678,数据信息可以自定义。
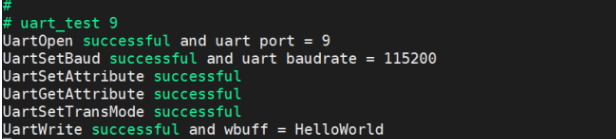
uart_test 9
串口软件接收到字符串“HelloWorld”
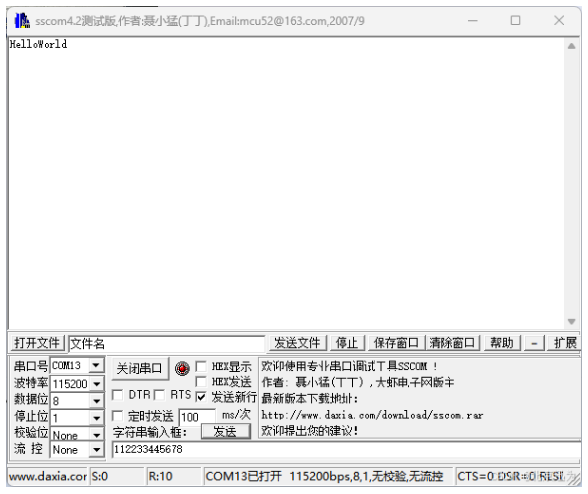
然后在串口软件发送数据“112233445678”,如下图所示:
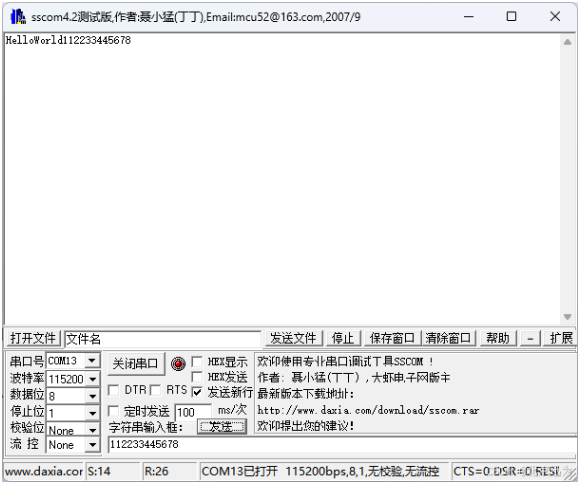
串口终端收到发送的字符串,如下图所示:
至此,串口实验完结。
- 相关推荐
- 热点推荐
- 开发板
- OpenHarmony
- RK3568
- 迅为电子
-
北京迅为RK3568开发板OpenHarmony系统南向驱动开发内核HDF驱动框架架构2025-03-11 2238
-
鸿蒙OpenHarmony南向/北向快速开发教程-迅为RK3568开发板2024-07-23 2638
-
迅为RK3568开发板篇OpenHarmony实操HDF驱动控制LED-编写内核 LED HDF 驱动程序2025-01-17 1955
-
迅为RK3568开发板篇OpenHarmony实操HDF驱动控制LED-添加内核编译2025-01-22 892
-
迅为RK3568开发板鸿蒙OpenHarmony系统固件烧写步骤2022-08-26 7103
-
【教程上新】基于迅为iTOP-RK3568开发板的OpenCV开发手册2023-02-08 2616
-
【北京迅为】itop-RK3568开发板驱动开发指南2023-08-29 2324
-
迅为iTOP-RK3568/RK3588开发板获麒麟软件适配认证2024-10-18 2419
-
【北京迅为】iTOP-RK3568OpenHarmony系统南向驱动开发GPIO基础知识2025-03-06 1695
-
北京迅为iTOP-RK3568开发板OpenHarmony系统南向驱动开发实操-HDF驱动配置LED2025-03-14 1746
-
【北京迅为】iTOP-RK3568开发板OpenHarmony系统南向驱动开发-第4章 UART基础知识2025-03-17 1327
-
【迅为工业RK3568稳定可靠】itop-3568开发板驱动开发第4章驱动模块传参实验2025-11-06 735
-
【迅为工业RK3568稳定可靠】itop-3568开发板Linux驱动开发实战:RK3568内核模块符号导出详解2025-11-21 2361
-
迅为驱动开发实战:iTOP-RK3568开发板eDP屏幕移植全攻略2025-12-30 1671
-
基于迅为iTOP-RK3568开发板搭建完整物联网控制平台2026-07-17 208
全部0条评论

快来发表一下你的评论吧 !
