

树莓派+ROS:低成本机器人大脑的超值之选,还是性能瓶颈?真相大揭秘!
描述
最近,人形机器人在全球范围内引发了巨大的关注,成为科技领域最热门的话题之一。从特斯拉的Optimus到稚晖君的远征A2系列,再到春晚舞台上惊艳亮相的宇树机器人,这些机器人不仅展示了强大的技术实力,更让人们看到了人形机器人未来走进日常生活的可能性。

特斯拉Optimus

远征A2系列
在2025年的春晚舞台上,宇树科技的人形机器人H1凭借其灵活的舞姿和精准的AI互动,成功“出圈”。这些机器人在节目中展示了扭秧歌、转手绢等复杂动作,背后是宇树科技强大的AI驱动全身运动控制技术和360°全景深度感知技术。与此同时,特斯拉的Optimus人形机器人也在全球范围内引发了热议,其展示了高度拟人化的动作和强大的任务执行能力。
宇树机器人
而在这场人形机器人技术的浪潮中,树莓派(Raspberry Pi)与ROS(机器人操作系统)的组合正在成为推动机器人走向大众的重要力量。树莓派凭借其小巧、低成本的特点,成为机器人开发领域的热门硬件平台。它不仅能够运行Linux操作系统,还能通过丰富的接口连接各种传感器和执行器,与ROS无缝对接。这种组合的优势在于其极高的性价比和强大的社区支持,使得更多开发者能够轻松入门。
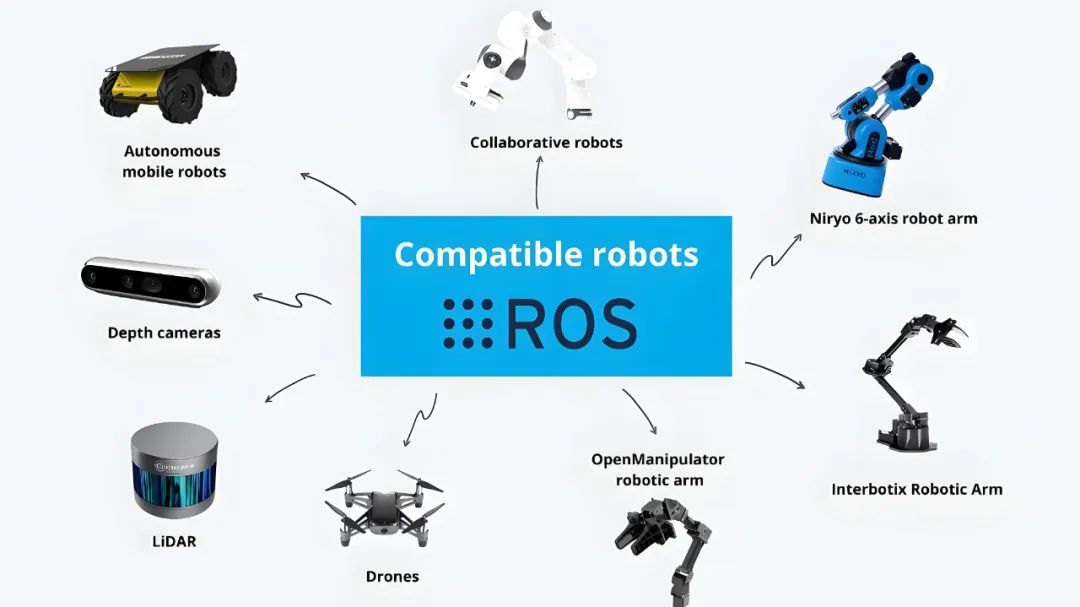
ROS是什么?为什么选择它?
ROS(Robot Operating System)并非传统意义上的操作系统,而是一个开源的机器人软件框架,用于开发、管理和通信机器人应用。它提供了硬件抽象、设备驱动、通信协议等功能,使得开发者可以专注于算法和应用开发,而无需深入了解硬件细节。此外,ROS的开源性、强大的社区支持以及广泛的适用性,使其成为机器人开发中的“瑞士军刀”。
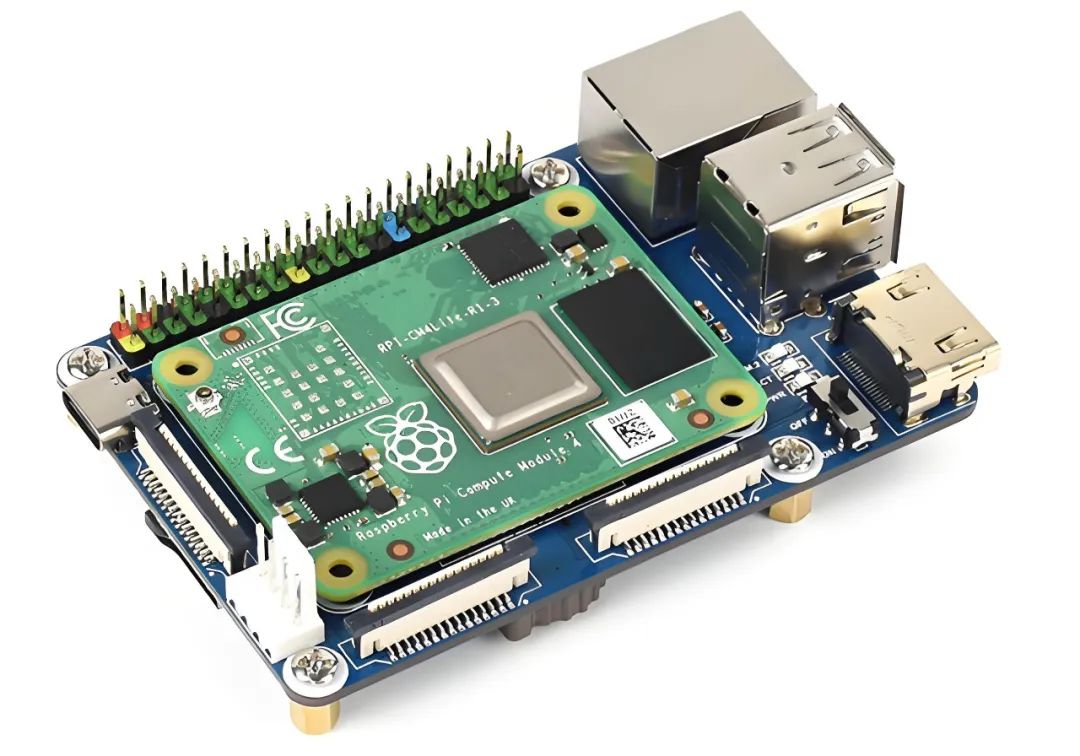
树莓派是什么?它如何与ROS结合?
树莓派是一款小巧、低成本的微型计算机,支持多种操作系统,包括Linux。它拥有丰富的接口(如USB、HDMI、GPIO等),可以轻松连接传感器、摄像头、显示器等外设。树莓派与ROS的结合非常自然:树莓派运行Linux系统,而ROS基于Linux开发,两者可以无缝对接。
在ROS中,树莓派可以作为主节点(master node)协调其他节点的通信,也可以作为从节点(slave node)执行特定任务。这种灵活性使得树莓派成为ROS开发的理想硬件平台之一。
树莓派用于ROS开发的优点
成本低:树莓派价格亲民,适合预算有限的开发者和教育机构。
便携性强:体积小巧、重量轻,可以轻松安装在机器人上。
功能丰富:树莓派支持多种操作系统和软件包,可以轻松扩展功能。
社区支持强大:树莓派和ROS都拥有庞大的开发者社区,提供丰富的教程和资源。
教育价值高:树莓派的易用性和ROS的强大功能使其成为机器人教育的绝佳工具。
树莓派用于ROS开发的缺点
性能有限:树莓派的计算能力和内存相对较低,难以处理复杂的任务,如图像处理或深度学习。
可靠性问题:树莓派不适合在恶劣环境下使用,可能会因高温、灰尘、湿度或振动而损坏。
安全性不足:树莓派容易受到网络攻击,需要额外的安全措施来保护数据。
SD卡寿命问题:运行ROS时,树莓派的读写操作频繁,可能导致SD卡故障。
如何开始树莓派与ROS的开发之旅?
如果你对树莓派和ROS的开发感兴趣,以下是一些入门建议:
1.选择合适的树莓派型号:建议选择Raspberry Pi 3或更高版本,因为它们的性能更好。
2.安装操作系统:选择支持ROS的Linux发行版,如Ubuntu或Raspbian。
3.安装ROS:根据你的树莓派型号选择合适的ROS版本,并按照官方指南进行安装。
4.连接外设:通过GPIO、USB等接口连接传感器、摄像头等设备。
5.编写和运行代码:使用Python或C++编写ROS节点,并通过ROS命令行工具或IDE运行。
树莓派与ROS的结合为机器人开发带来了无限可能,但它们也并非万能。树莓派的性能瓶颈和可靠性问题需要开发者在项目中权衡。如果你的项目需要高性能计算,可能需要考虑更强大的硬件平台。但对于初学者、教育项目或轻量级应用,树莓派与ROS的组合无疑是性价比极高的选择。
无论你是机器人开发的新手,还是希望在项目中尝试低成本解决方案的资深开发者,树莓派与ROS的组合都值得你一试。让我们一起探索这个充满可能性的世界吧!
-
能够精准定位的树莓派机器人!2025-05-17 1747
-
树莓派机器人船构建2023-07-10 905
-
关于Robocon:日本机器人大赛2023-02-28 4393
-
基于树莓派2B的ROS机器人2022-12-05 1204
-
低成本机器人消毒系统开源分享2022-11-24 715
-
如何使用树莓派开发智能机器人控制系统2021-12-23 4815
-
做ROS与树莓派进行通信2021-09-06 1676
-
树莓派镜像烧写2021-08-06 2260
-
【ROS RIKIBOT基础--使用系列 第一章节】ROS机器人硬件系统 精选资料分享2021-07-30 2342
-
有关树莓派制作机器人平台的探索2015-11-10 4491
-
简易低成本机器人——PVCBOT系列2015-02-02 3987
-
树莓派打造视频监控机器人Verybot2014-09-18 112797
-
变形乐高玩具变形和树莓派一起玩出乐高机器人!2014-09-02 11883
-
NI与乐高教育合力开发面向基础教学的低成本机器人平台2008-08-27 545
全部0条评论

快来发表一下你的评论吧 !
