

昆虫触角启发研发双模触觉传感器
电子说
描述
【文章亮点】
多模态感知能力:通过接触高度、接触面积和压力大小,传感器(BITS)能够感知物体的软硬程度。
材料类型识别:利用材料获取或失去电子的能力差异,BITS阵列生成独特的静电信号,从而识别不同材料类型。
杨氏模量量化:开发的ITPS(智能触觉感知系统)能够量化材料的杨氏模量,提供更精确的物理特性评估。
应用潜力:BITS阵列可增强机器人和假肢的触觉感知系统,在医疗康复和智能产业中具有广阔的应用前景,特别是在环境交互和触觉反馈传递方面。
【图文解读】
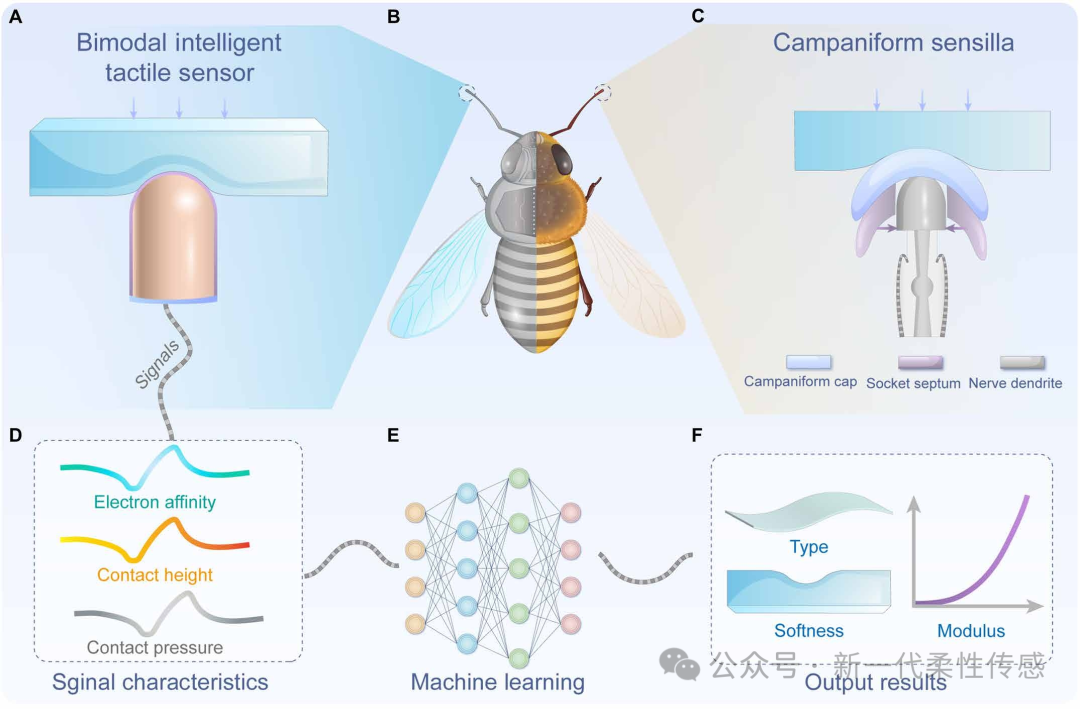
图1 生物启发型位移和压力传感器的示意图。 (A) 示意图展示了位移和压力传感器与弹性体的接触。(B) 昆虫触角和 (C) 触角上的压电传感器用于双模电信号的检测。(D) 位移和压力传感器感知的信号(电子亲和力、接触高度和接触压力),用于 (E) 机器学习来 (F) 辨别材料类型和软度,并量化模量。
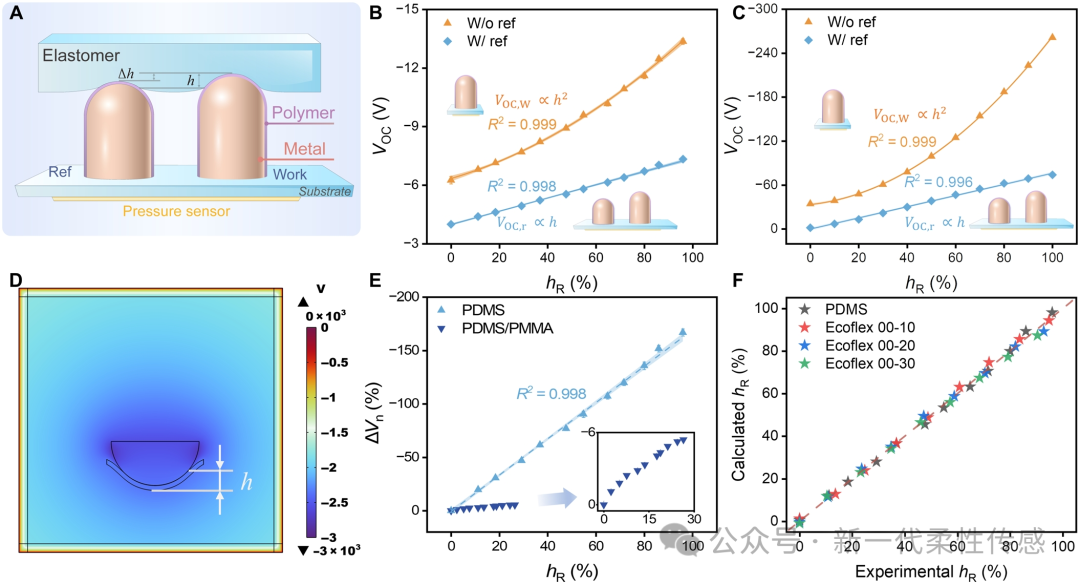
图2 开路电压VOC与归一化接触高度hR之间的关系。(A)BITS单元与弹性体接触的示意图。(B)实验结果和(C)COMSOL模拟结果显示开路电压VOC与带有或不带有参考电极的hR之间的关系。(D)COMSOL模拟(在15%hR处的VOC)。(E)当与PDMS弹性体和PDMS / PMMA接触时,ΔVn与hR之间的关系。(F)关于PDMS弹性体,Ecoflex 00-10,Ecoflex 00-20和Ecoflex 00-30,计算的hR与实验hR之间的一致性。
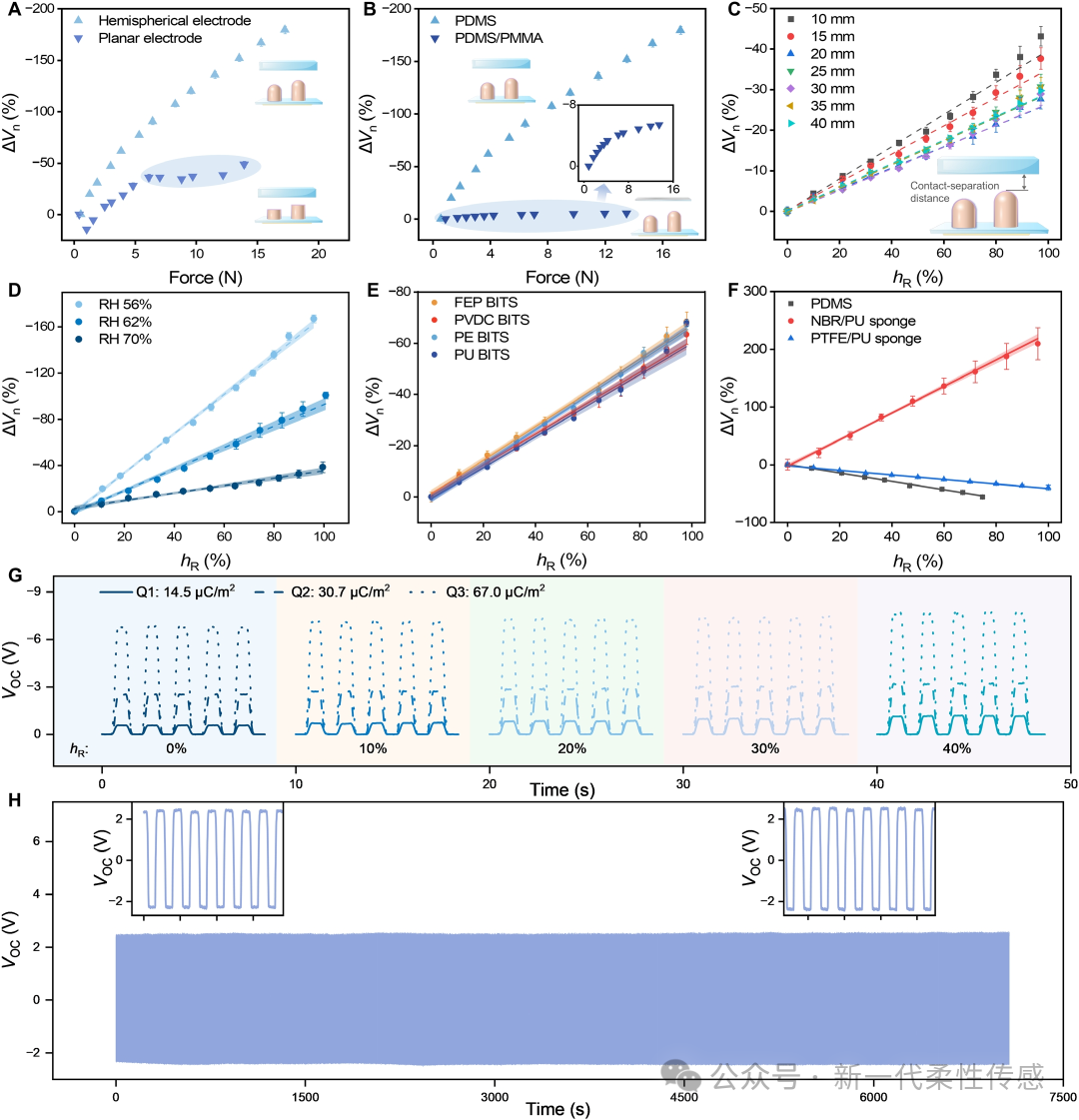
图3 BITS单元的影响因素。(A) 半球形和平面头BITS随力增加的ΔVn变化。(B) 使用半球形头BITS的PDMS弹性体和PDMS/PMMA之间ΔVn与接触力的关系(蓝色区域:常数区域)。(C) 不同接触分离距离下ΔVn与hR的关系,以及(D) 不同湿度环境下的关系。不同摩擦电层(分别为FEP,PVDC,PE和PU)的BITS单元中ΔVn与hR的关系(E),以及(F) PDMS弹性体,NBR/PU海绵和PTFE/PU海绵测试样品的关系。(G) 不同表面电荷密度的电压曲线。(H) 接触循环测试的电压曲线及其放大图。
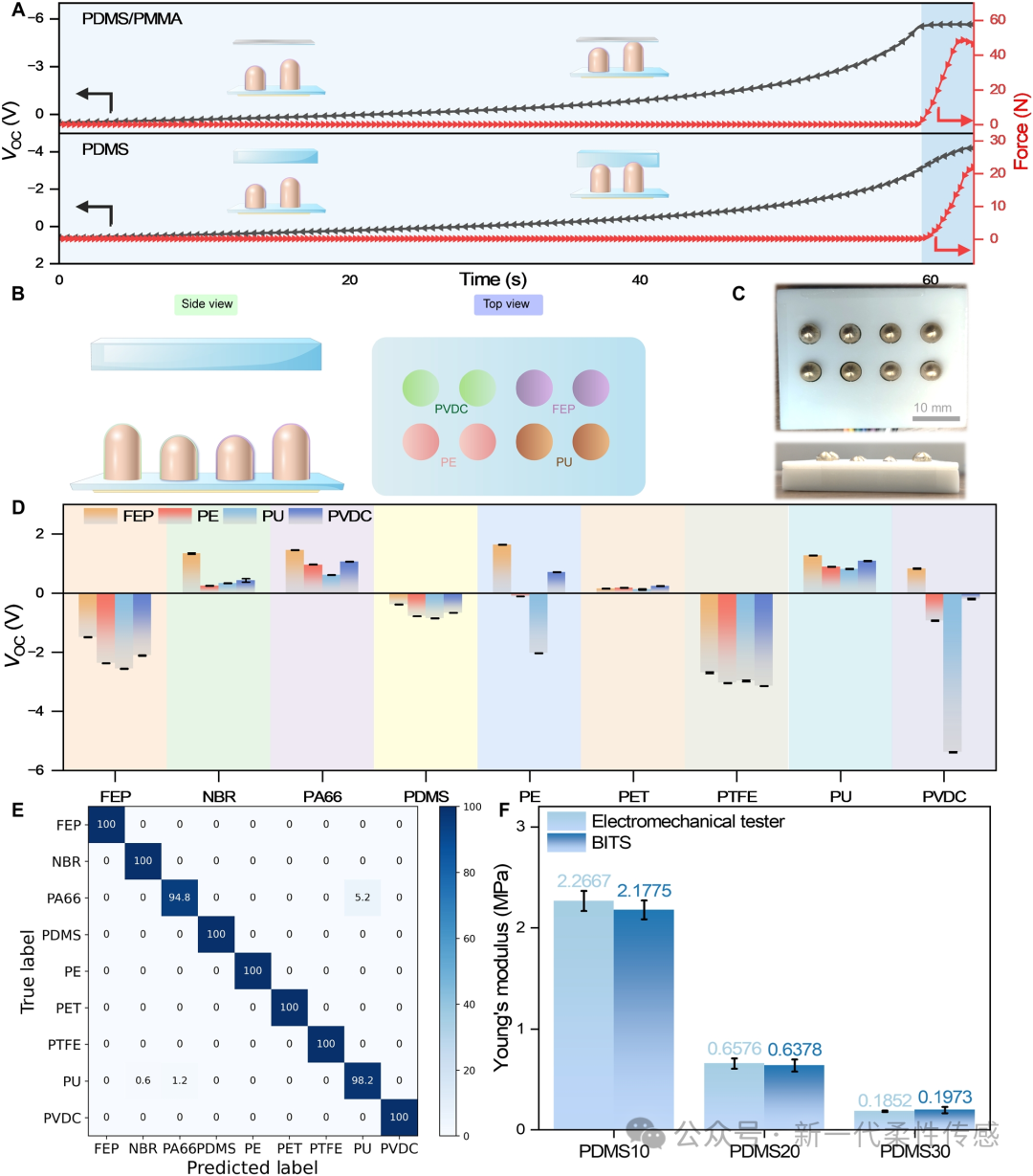
图4 柔软度识别与模量量化。(A)使用PDMS弹性体和PDMS/PMMA的BITS进行接近和接触过程。(B)BITS阵列的示意图和(C)照片。(D)不同物体与BITS阵列的开路电压。(E)材料类型识别的

图5 采用BITS阵列实现的材料类型和软度识别应用。(A) 结构示意图、传感过程及机器学习的说明。(B至D) BITS阵列的输出信号,以及(E至G) 对NBR/PMMA、PDMS/PMMA和PDMS20的识别和预测结果。
【结论与展望】
多模态触觉感知对增强现实应用至关重要,但现有触觉界面难以同时检测物体类型和软硬度。受昆虫触角钟形感器启发,作者提出了一种基于摩擦电效应的半球形双模智能触觉传感器(BITS)阵列。该系统能够通过材料变形性和电子亲和力的差异,生成独特的摩擦电输出指纹,实现材料类型识别(准确率99.4%)、软硬度识别(准确率100%)和模量量化。BITS具有微型化潜力,可提供实时、准确的触觉信息,为人机一体化应用提供类似天线的触觉感知功能。
【参考文献】
Shaoshuai He et al. ,Biomimetic bimodal haptic perception using triboelectric effect.Sci. Adv.10,eado6793(2024).DOI:10.1126/sciadv.ado6793
审核编辑 黄宇
- 相关推荐
- 热点推荐
- 触觉传感器
-
西湖大学:研发CMOS兼容压力传感器阵列,实现精准触觉感知功能2025-12-30 680
-
研制仿生电子触角传感器,突破无视觉环境感知瓶颈2025-04-10 1393
-
仿生触觉传感器:触碰未来的科技奇迹2025-03-05 1713
-
西安交通大学:受章鱼触角接触行为启发的仿生触觉传感阵列2024-12-03 2769
-
工业机器人的触觉传感器有哪些?传感器作用是什么?2024-03-11 2757
-
用于机器人触觉和非接触距离感知的柔性双模态传感器设计2024-02-28 2658
-
什么是触觉传感器?触觉传感器如何工作?2023-08-29 6870
-
今日传感财经:MEMS传感器概念报涨;触觉传感器概念报涨;触觉传感器概念报涨2022-12-16 1355
-
广西大学:研发可穿戴的摩擦电触觉传感器2022-11-29 2366
-
浅析模拟触觉传感器原理及应用2018-08-02 9733
-
基于传感器的触觉设计应用2017-09-14 1206
-
基于光学的触觉传感器电路设计_张贵相2017-03-19 1122
-
[分享][下载]美国PPS触觉传感器有限公司2009-12-16 4251
全部0条评论

快来发表一下你的评论吧 !
