

眺望T536核心板NPU开发入门指南
描述
前言:
眺望电子T536 核心板集成高性能2TOPS NPU(神经网络处理器),支持ONNX、TensorFlow 等主流框架模型(需转换为 NBG 格式)。本文基于 Tina SDK Linux 系统,介绍 T536 NPU 的开发环境搭建、模型部署流程及入门示例,帮助开发工程师快速上手。
一、背景概述
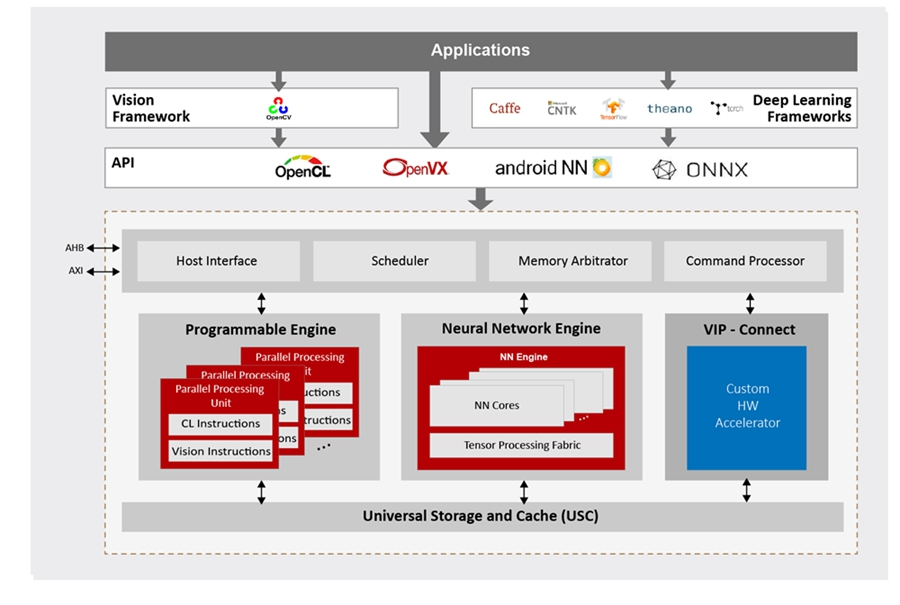
T536处理器集成VeriSilicon(芯原微电子)VIPNano系列NPU IP,型号为 :VIP9000NANODI_PLUS_PID0X1000003B。
VeriSilicon的Vivante VIP9000系列为需要实时和低功耗AI设备的市场提供可编程、可扩展和可扩展的解决方案,具有行业领先的能效(TOPS/W)和面积效率(mm2/W)。
VIP9000系列IP支持所有流行的深度学习框架,并通过量化、修剪和模型压缩等优化技术原生加速神经网络模型。AI应用程序可以通过Vivante的ACUITYTM Tools SDK进行离线转换,轻松完成移植。
二、开发环境部署
2.1 环境要求
操作系统:Ubuntu 20.04 LTS虚拟机
环境依赖:Python3.6+、Docker、交叉编译工具链
工具链:Acuity Toolkit(模型转换)、VivanteIDE(仿真调试)
硬件平台:眺望对照T536开发板(预装Tina Linux系统)
2.2 工具安装
2.2.1 手动安装Acuity Toolkit模型转换工具
# 解压工具包(以Ubuntu 20.04为例)tar xvf Vivante_acuity_toolkit_binary_6.6.1_20220329_ubuntu20.04.tgzmv acuity-toolkit-binary-6.6.1 /opt/VeriSilicon/
# 安装依赖cd /opt/VeriSilicon/acuity-toolkit-binary-6.6.1pip3 install -r requirements.txt
# 配置环境变量echo 'export ACUITY_PATH=/opt/VeriSilicon/acuity-toolkit-binary-6.6.1/bin' >> ~/.bashrcsource ~/.bashrc
注:Acuity Toolkit适配配置需根据T536的NPU型号选择目标架构参数
2.2.2 Docker镜像快速部署(推荐)
# 加载镜像sudo docker load -i npu_Tool_docker_voxx.tar
# 启动容器(映射工作目录)sudo docker run -it --privileged \ -v /host/workspace:/container/workspace \ --name npu_t536_dev \ ubuntu-npu:v2.1 /bin/bash
三、模型部署流程(以YOLOV5为例)
3.1 模型转换与量化
①准备模型文件
提供固定输入尺寸的ONNX模型(如yolov5s-sim.onnx,输入尺寸1x3x640x640)。
配置文件:
定义通道均值与缩放系数(例:0.0 0.0 0.0 0.00392157)。
指定输入输出节点名称。
②执行转换脚本
# 进入模型目录cd ai-sdk/models/yolov5s-sim
# 导入ONNX模型./pegasus_import.sh yolov5s-sim --input-size 640x640 --outputs 350 498 646
# 量化(uint8)./pegasus_quantize.sh yolov5s-sim uint8 --dataset ./images/dataset.txt
# 导出NBG模型(T536平台需指定型号 VIP9000NANODI_PLUS_PID0X1000003B)./pegasus_export_ovx_nbg.sh yolov5s-sim uint8 VIP9000NANODI_PLUS_PID0X1000003B ${VIV_SDK}
3.2 编译示例程序
#在SDK根目录执行以下命令make menuconfigAllwinner ‑‑‑>Vision ‑‑‑><*> ai‑sdk‑viplite........................... allwinner npu viplite framework ‑‑‑>make ‑j32
# 输出路径out/xxx/compile_dir/target/ai-sdk/yolov5/yolov5
3.3 运行示例程序
把二进制文件 yolov5、测试图片 dog_640_640.jpg 和模型文件yolov5s‑sim_uint8.nb(整个 test目录)推到板端,执行以下命令:

./yolov5 yolov5s‑sim_uint8.nb dog_640_640.jpg
VIPLite driver version=0x00010d00...detection num: 316: 82%, [111, 243, 256, 601], dog7: 69%, [390, 83, 576, 194], truck1: 45%, [83, 143, 468, 467], bicycl
-
基于米尔全志T536开发板的多协议物联网关的方案测试2025-06-19 2509
-
米尔国产全志T536系列核心板开发板-产品手册2024-10-31 4648
-
【米尔-全志T536开发板试用体验】总结与建议2025-03-27 3728
-
智能配电新纪元:基于飞凌嵌入式T536核心板的DTU解决方案2025-03-31 1894
-
【米尔-全志T536开发板试用体验】 试用测评报-初识T5362025-04-23 1812
-
T536行业首发!飞凌嵌入式FET536-C/FET536-S核心板惊艳亮相2024-09-30 1801
-
国产全志T536系列-国产工业级-米尔核心板开发板2024-10-29 1927
-
新品预告 | 全志T536核心板,全新一代工控首选2024-12-06 5660
-
正式发售,赋能电力和工业市场,米尔全志高性能工业级T536核心板2024-12-20 2132
-
米尔全志T536核心板正式发售,赋能电力与工业市场2024-12-26 2097
-
飞凌嵌入式携手全志,T536全国产核心板重磅发布2025-03-05 1930
-
解析眺望 T536 核心板 Local Bus 总线通信功能2025-03-06 3307
-
精彩回顾 | T536核心板发布会亮点回顾2025-03-20 2057
-
深度评测 | 眺望电子T536开发板,工业边缘智能的新选择2025-04-03 1864
-
T536全国产工业核心板详细介绍2025-05-27 1653
全部0条评论

快来发表一下你的评论吧 !
