

空中小精灵:用 Raspberry Pi Pico 2 打造你的个人无人机!
描述

3D打印的CAD设计
定制无人机的打造之旅始于CAD软件设计。我的初步设计是完全3D打印的,具有封闭结构和悬臂式支撑臂,用于承受点力。蜂窝状盖子提供了冷却效果,而封闭外壳则允许嵌入XT-60和MR-30连接器,呈现出整洁且一体化的外观。在内部,我确保所有电气组件都牢固安装,以避免不必要的移动,这些移动可能会破坏飞行的稳定性。

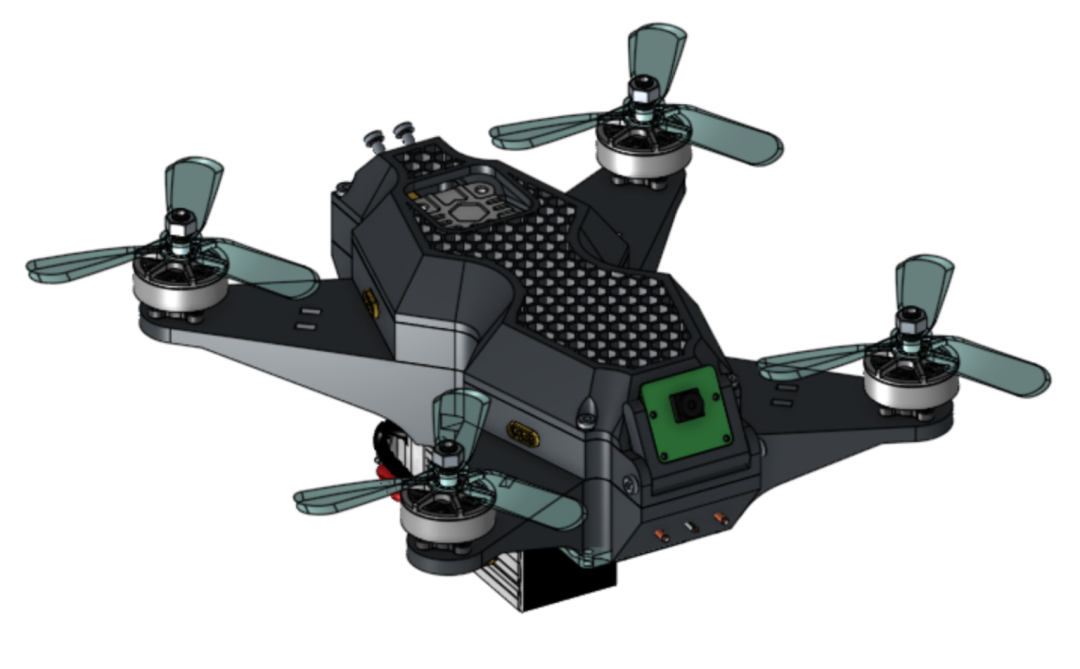
测试很快显示,3D打印的框架很脆弱,经常在撞击时断裂。此外,我的打印机构建区域的限制意味着电机位置非常拥挤。为了解决这些问题,我使用CNC技术从4毫米碳纤维材料上切割出一个新的框架,增大了轮距以提高稳定性。我使用Carveco软件生成刀具路径,并在我们创客实验室的WorkBee CNC上切割框架。两个小时后,我就拥有了一个坚固且已组装好的框架,准备安装电子设备。
不是一台,不是两台,而是三台Raspberry Pis
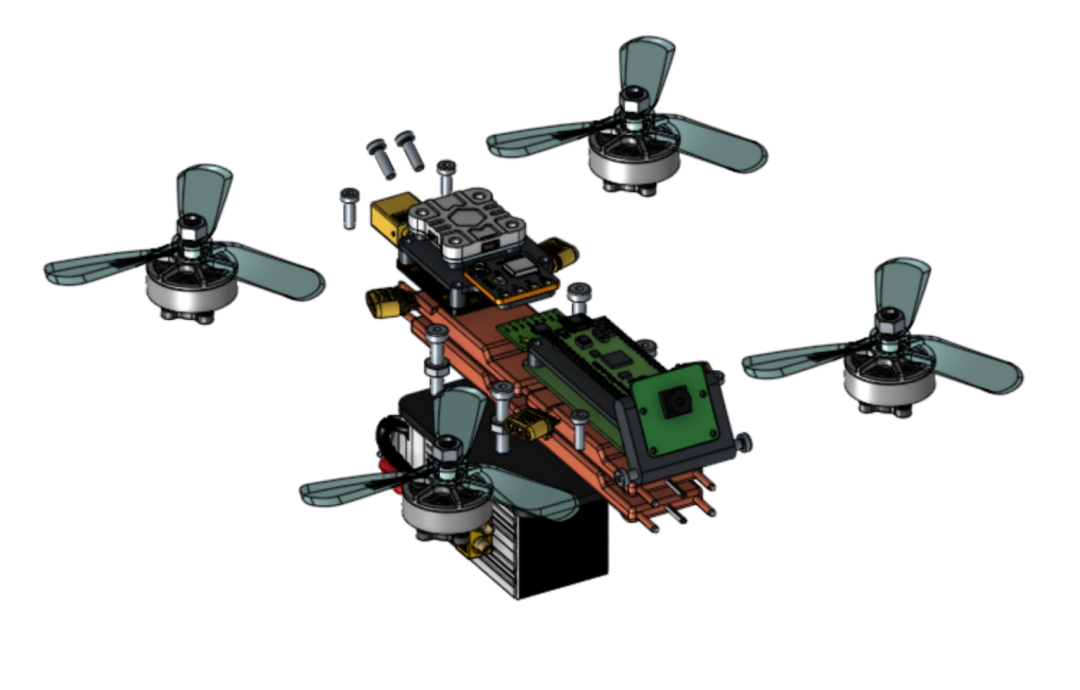
对于无人机的“大脑”,我使用Raspberry Pi Pico 2连接MPU6050陀螺仪来获取实时方向数据,并使用IBUS协议接收器来简化控制输入。最初,由于处理五个单独的PWM信号存在延迟,我遇到了信号处理方面的问题。切换到IBUS后,循环频率提高了十倍,从而大大改善了飞行响应。Pico负责处理用于稳定性的PID(比例-积分-微分)计算,而一个4合一ESC则管理电机信号。此外,无人机还搭载了一台Raspberry Pi Zero,配备Camera Module 2和一个模拟VTX,用于实时第一人称视角(FPV)飞行。
编程基于Tim Hanewich的Scout飞行控制器代码,实现了使用PID值来维持所需角速度的“速率”模式控制器。精细调整PID增益至关重要;设置不当可能导致不稳定和危险的振荡。我遵循了一个仔细的调整过程,从每个参数的较低值开始,然后慢慢增加。

为了使过程更安全,我构建了一个测试装置来隔离每个轴并模拟飞行条件。这使我能够在进行实际飞行测试之前实现粗略的调整,最终确保了无人机的安全和稳定性能。
- 相关推荐
- 热点推荐
- 无人机
- Raspberry Pi
-
Raspberry Pi Pico 22024-11-25 3101
-
基于Raspberry Pi和通用Windows平台(UWP)的无人机2023-07-03 765
-
远程编程Raspberry Pi Pico2023-06-16 856
-
基于Raspberry Pi的DIY无人机第3部分–FPV设置指南2023-02-24 7493
-
基于Raspberry Pi的4G无人机2022-12-21 925
-
使用Raspberry Pi Pico的LED序列2022-11-14 953
-
无人机反制市场分析2022-08-23 6954
-
Raspberry Pi 4/3B的Pico开发板2022-07-26 1731
-
使用raspberry pi Pico的原因2022-02-07 1797
-
无人机的工作原理2021-01-13 5579
-
丰宁供电公司采用精灵4RTK多旋翼无人机完成空中巡视任务2020-11-05 1326
-
无人机类型之植保无人机,带你了解什么是植保无人机?2019-06-28 3837
-
武汉无人机无人机比武演练,普宙O2当裁判2018-08-28 3058
-
智能植保先锋,亿天航植保无人机2016-02-27 3439
全部0条评论

快来发表一下你的评论吧 !
