

机器人实时TCP速度输出与写屏方法步骤
电子说
1.4w人已加入
描述
1)机器人实时tcp速度可以通过系统模拟量输出。
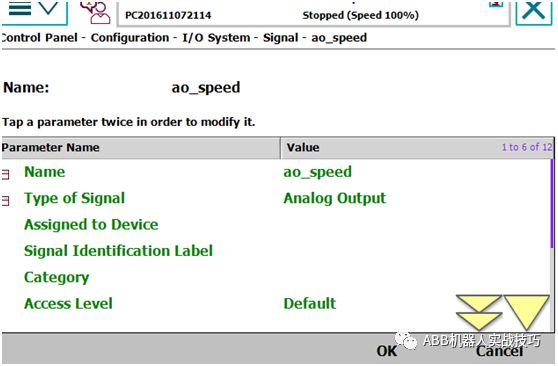
2)控制面板,配置,signal里新建模拟输出如下(举例为虚拟AO,也可以建立诸如DSQC651真实模拟输出)
3)
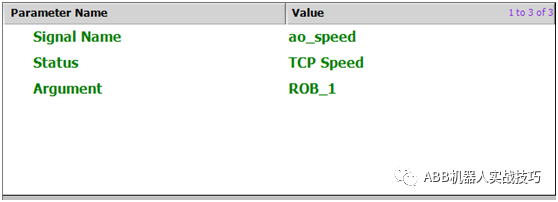
4)关联次信号到系统输出
5)在控制面板,配置的system ouput里新建,信号名为刚建立的模拟输出,status选择TCP Speed
6)
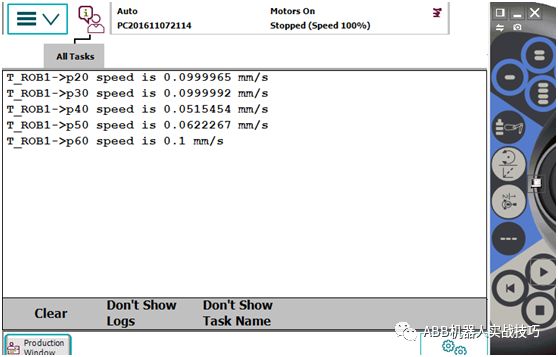
7)此时测试,可以通过模拟量ao_speed获得机器人的实时tcp速度。在一些和机器人速度有关的工艺上可以使用该信号。
8) 想在机器人运行到某些位置时,也实时写屏速度,如何实现
9)可以通过MoveLSync语句来实现
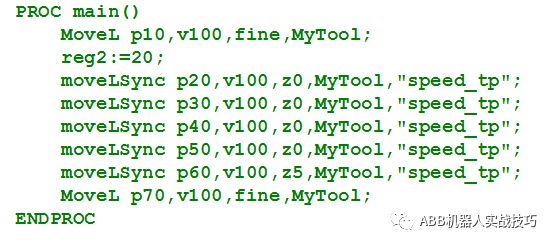
10)MoveLSync和MoveL语句相同,语句末加入机器人到达位置时调用的程序,该程序内不能有运动指令。如果使用zonedata,则机器人到达最接近设置位置时调用程序,类似triggerIO的提前距离为0.
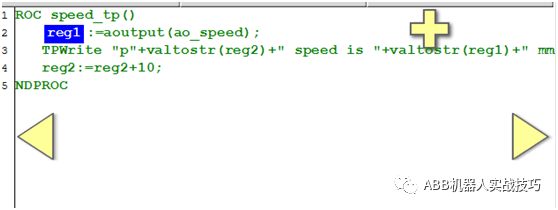
11)Speed_tp程序如下。即先获得实时速度,然后写屏。
12)
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块2025-01-04 2278
-
水下机器人便携式遥控单元设计2011-03-08 9938
-
创意机器人的教程2012-10-11 15132
-
工业机器人的基本结构2015-01-19 9468
-
机器人视觉——机器人的“眼睛”2015-01-23 6158
-
美国机器人送快递啦2015-12-31 5175
-
机器人的主要技术参数2017-08-15 7489
-
如何保障桁架机器人的安全2018-09-29 3127
-
机器人传感器的类别和应用原理2018-11-08 2928
-
焊缝跟踪:自动化机器人实时焊缝跟踪寻位2019-04-19 1523
-
如何实现移动机器人的设计?2020-11-23 3276
-
智能机器人2021-10-13 26151
-
Profinet转Modbus TCP网关连接搬运机器人配置案例2023-06-07 1420
-
深刻理解机器人TCP2017-09-29 4220
-
机器人虚拟TCP的设置及其在加工中的应用2018-03-08 1139
全部0条评论

快来发表一下你的评论吧 !
