

驱动软件定义整车变革的网络技术
描述
随着汽车工业的不断进步,汽车网络技术也经历了从简单到复杂、从低带宽到高带宽的演变过程。最初,汽车内部的电子控制单元(ECU)之间的通信主要依赖于控制器局域网络(CAN)总线。CAN总线于1980年代由博世公司开发,旨在提高汽车电子系统的可靠性和效率。它以其高抗干扰能力和实时性,迅速成为汽车行业的标准通信协议,广泛应用于发动机管理、车身控制等多个领域。然而,随着汽车电子设备数量的激增和功能的日益复杂,传统的CAN总线在数据传输速率和带宽方面逐渐显露出局限性。为了满足日益增长的智能化功能需求,汽车行业参与者们开始探索更高效的网络技术。十多年之前以太网技术的引入为汽车网络的发展带来了新的机遇。以太网以其高带宽、灵活性和成熟的生态系统,逐渐成为汽车网络的重要组成部分。
随着智能化水平的不断提升,如何升级汽车网络技术来满足整车开发需求:
对于新功能,需要缩短从研发到量产时间;
对于AI技术的引入,需要给算力平台提供更多实时整车数据
因此网络技术无论是以太网还是CAN总线都需要对高带宽、低延迟、高安全性的性能要求持续提升予以关注与投入。CAN XL作为下一代的CAN技术已经在2024版更新的 ISO11898-1,ISO11898-2中正式支持,标志着在技术上已经走向成熟。新CAN标准无论是在物理通信速率上、网络协议兼容性上都将助力汽车智能化、软件定义汽车的趋势。
其主要技术特点有:
传输速率能够达到20Mbit/s
支持大数据传输,单帧数据能够达到2048字节
支持以太网透传,支持当前车载以太网常用协议,例如:TCP/IP,SOME/IP等
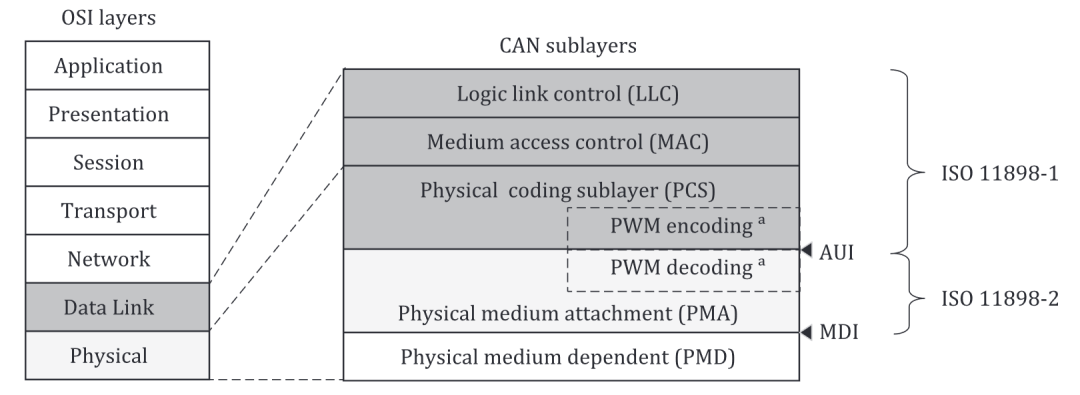
图 1 CAN物理层与数据链路层在ISO标准组织中
来源:www.iso.org, a:表示只有CAN XL支持
在接下来的文章中,我们将深入探讨CANXL对于在整车网络架构应用中的优势,以及未来可能的发展方向。通过对这一领域的深入了解,我们可以更好地把握汽车行业的未来趋势。
驱动软件定义整车变革的网络技术
将SOA架构推广至整车网络中
SOA是一种软件设计方式,在SOA中服务由应用组件通过网络上的通信协议提供给其他组件使用。其原理独立于供应商和其他技术,SOA是将软硬件和EEA进行抽象的一种方法,其关键的就在于设备抽象化与软件的复用性。
当前由于通信协议的限制,SOA架构往往只在Ethernet网络下实现。在上文中可以看到在整个整车网络中,还有大量控制器节点采用的是CAN通信的方式,如果未来需要支持SOA服务化,那么CANXL将会既能兼容当下以信号为主的CAN通信方式,还能够以IP为主的SOA通信协议。
在AUTOSAR R23-11已经集成支持CAN XL的标准接口,CanIf与EthIf同时能够访问CAN XL Driver。同时在网络协议商Vector中也提出了支持基于SOME/IP协议基于CANXL的解决方案。这样能够有效地拓展SOA协议至CAN网络中,当然CAN网络中并不是所有的通信节点必须支持SOA,开发人员可以根据自身的设计目标逐步推广。
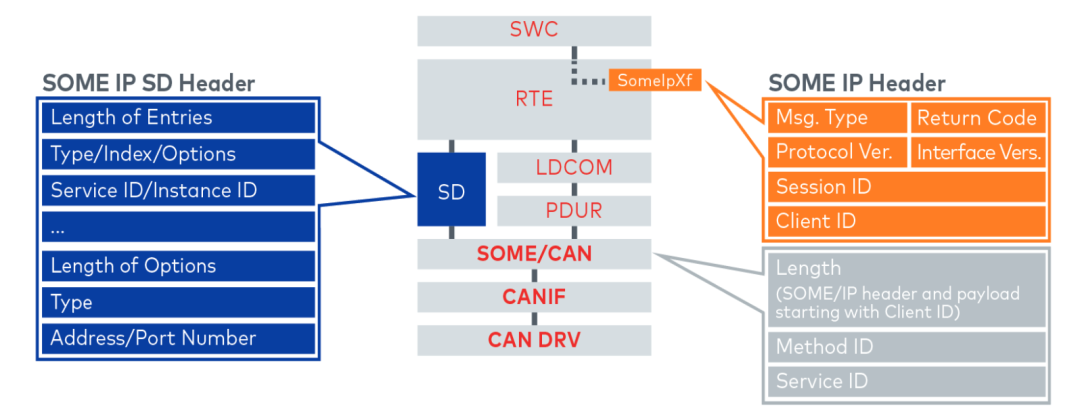
图 2 采用SOME/IP与SOME/CAN的CAN网络架构
来源:Vector
“ IP Concepts With CAN XL-Transformation of SOME/IP towards SOME/CAN”
提高整车时间同步整体性能
在整车网络架构中,网络各个节点之间需要持续精准协调与控制需要牵涉到时间同步问题,而在当下以以太网与CAN网络作为主要参与总线技术背景下,其时间同步策略如图3所示。可以看到在以太网与CAN网络之间存在着时钟网关,需要在软件层面进行时间数据转换,因此将会产生时间延迟等误差。
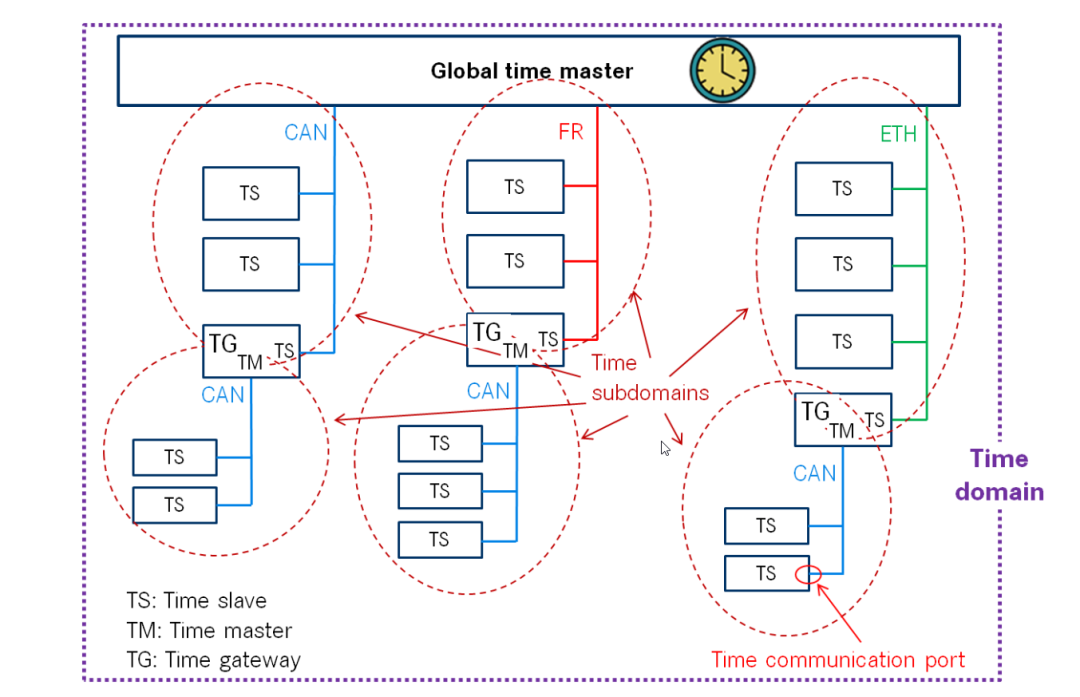
图 3 以太网与CAN网络时间同步架构示意图
来源:AUTOSAR
“Specification of Time Synchronization over CAN”
在CAN XL的技术方案中因为有以太网数据透传技术所以可以采用基于以太网协议的时间同步技术。且在第二层数据链路层通过硬件完成,将为大大降低从Ethernet转发至CAN XL总线上的转发延迟。图 4为基于CANXL技术下可以支持时间同步的解决方案。
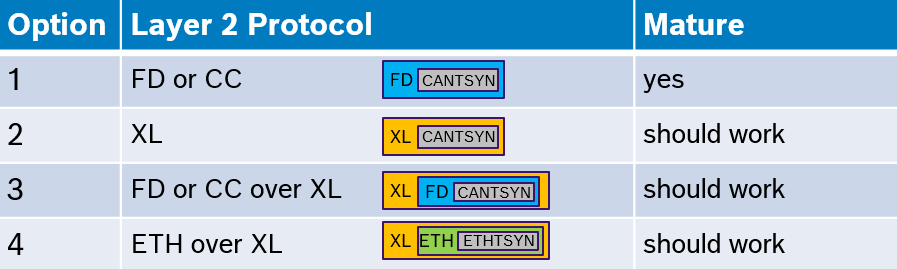
图 4 CANXL能够兼容两种AUTOSAR时间同步协议
来源:博世
CC:Classic CAN,FD:CANFD,XL:CAN XL
增强整车安全冗余性
随着自动驾驶辅助系统越来越普及以及端到端AI大模型在车内使用的推广,国内车厂已明确了未来规模化推广的时间表。同时,国内外车厂在底盘线控转向系统的应用以及国家法规对于线控转向要求的明确与落地同样加速未来整车的进一步提升安全冗余的系统架构。那么,对于网络通信同样需要讨论这一话题。在主干网络形成以车载以太网环形网络作为主要设计方案之后,如何保证车辆决策控制单元与核心执行层控制单元的安全有效通信将成为主要考虑因素。正如图 2所展现的,决策控制单元至执行控制单元的网络链接更多是采用CAN通信连接,那么提升以及增加CAN通信带宽、硬件接口将是简单有效的措施。
此外,对于L3以上的自动驾驶场景,需要考虑“最小风险操纵”(Minimum Risk Manoeuvre,MRM),即潜在的极端失效场景。如果决策单元出现异常,系统应采取哪些措施,以及是否存在冗余决策单元进行决策控制,将至关重要。同时,冗余决策单元在此场景下也需要获取环境感知信息,因此冗余感知通信网络的设计也需纳入考虑。当前,感知传感器方面,摄像头主要采用SerDes接口,激光雷达以以太网为主,而毫米波雷达和超声波雷达则主要依赖CAN网络。如何设计这些安全冗余性系统将由系统设计者决定,但基于CAN网络通信的解决方案将是最具性价比的选择。
图 5 自动驾驶高阶冗余系统
可以从CANXL得到的收益
从CARIAD SE在CiA发表的关于提升至CANXL的网络性能的总结来看,CANXL基于当下在整车CAN网络负载压力较大下,具有明显的改善作用;且网络设计优化较为简单灵活。
场景一:两条CANFD总线合到一条CANXL总线
两条CAN FD总线(500kbit/s仲裁段速率和5Mbit/s数据段速率)通信数据帧直接合并到一条CAN XL总线上(500kbit/s仲裁段速率,10Mbit/s和20Mbit/s数据段速率)。从下图可以看到在CANXL上的总线负载性能指标与理论接近、延迟与抖动也与CANFD表现一致。
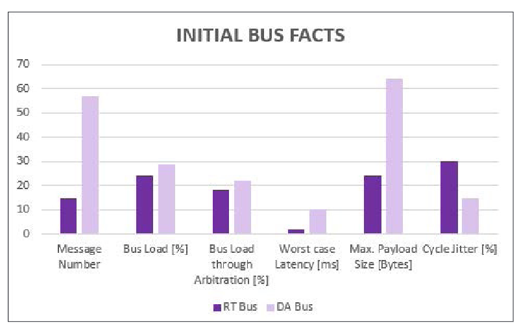
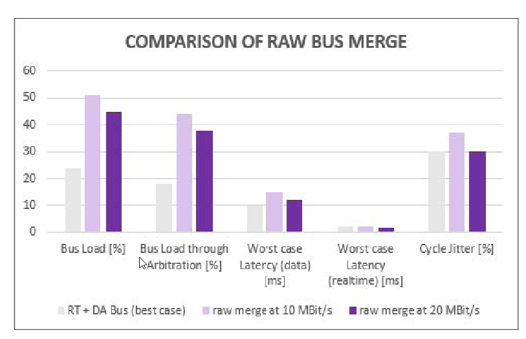
图 6 CANFD 数据直接合并后在 CANXL 性能前后对比
来源:CARIAD SE
“Migrating from Flexray to CAN XL”
www.can-cia.org
左图为原始CANFD参数性能
右图是CANFD、CANXL(10M)、CANXL(20M)的性能比较
场景二:在CANXL总线上优化发送节点的数据帧矩阵,满足降低总线负载为目的
以上层应用端传输数据优化为主,把优先级接近的、循环周期接近的数据帧进行合并。则前后对比发现总线负载在10Mbit/s下比优化前降低超过50%,在20Mbit/s下降低接近70%,在延迟与抖动方面由于数据帧数量减少也带来性能提升。
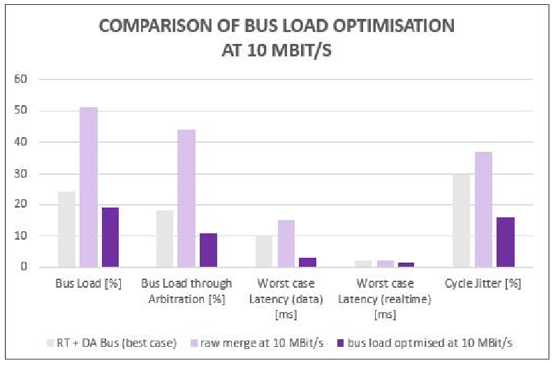
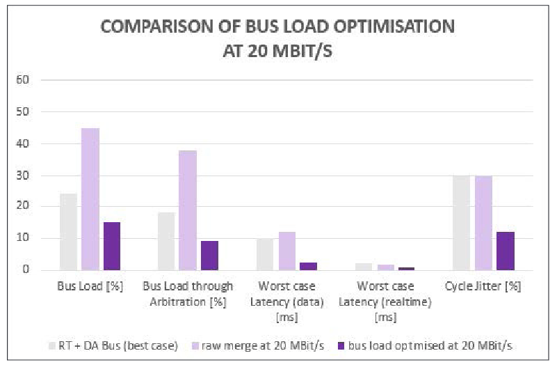
图 7 CANXL数据帧设计优化后,性能前后对比
来源:CARIAD SE
“Migrating from Flexray to CAN XL”
www.can-cia.org
场景三:在CANXL总线上采取ALL in 1
每个发送节点都使用一条数据帧,以原先最高优先级以及最短发送周期构建。根据当前的网络信号定义,最大数据为360字节(远小于设计最大2024字节)。延迟与抖动性能又进一步降低。
在国内市场,汽车正经历从电动化向智能化的快速转型,整车电子电气架构也在不断优化以适应这一趋势。新技术和新功能的引入要求解决方案具备向下兼容性和持续可扩展性,以满足未来发展的需求。在这一背景下,CAN XL作为下一代汽车网络通信技术,不仅提供了更高的数据传输速率和更大的带宽,还支持更复杂的网络拓扑结构,使得车辆内部各个电子控制单元(ECU)之间的通信更加高效和灵活。这一技术的应用将进一步推动智能驾驶、车联网等新兴应用的发展,提升车辆的智能化水平。
在日益激烈的市场竞争中,网络设计的要求愈发严格,必须重点关注性能、安全性和可持续性等关键评价因素。CAN XL的引入,不仅提升了数据传输的效率和可靠性,还为未来的功能扩展和技术升级提供了更为坚实的基础。这不仅关乎用户体验,也直接影响到整车竞争力的持续提升。通过采用CAN XL技术,汽车制造商能够更好地应对市场需求变化,推动行业的创新与发展。
-
计算机与网络技术基础2008-12-07 9212
-
无线传感器网络技术及应用现状2009-10-26 7283
-
嵌入式网络技术应用2012-08-20 2686
-
整车网络系统和嵌入式技术2015-07-07 2557
-
通信、网络技术会议2016-04-25 3671
-
LTE与WiFi网络技术有什么区别?2019-09-23 6409
-
如何利用CDMA网络技术实现远程图像监控系统的设计2021-02-26 2502
-
无线传感器网络技术有哪些好处2021-03-17 2203
-
LTE与WiFi网络技术有何差别?2021-05-21 1778
-
基于以太网的无源光网络技术应用是什么?2021-05-31 1892
-
WIFI无线网络技术有哪些应用范围是什么2021-11-04 4026
-
Arm CoreLink NIC-400 网络技术参考手册2023-08-02 881
-
软件定义网络技术现状分析2017-11-18 4634
-
通信网络技术载体主要包括 通信网络技术应用2023-05-06 4248
-
软件定义光网络技术与应用2023-11-10 504
全部0条评论

快来发表一下你的评论吧 !
