

优步事故初步调查_优步自动驾驶事故原因竟是它
电子说
描述
优步自动驾驶事故事件
18日晚上美国优步科技公司的一辆自动驾驶汽车撞上了一名正在过马路的女子。被撞女子在被医后,因伤势过重死亡。
事发时车速约64km/h 无减速迹象
事故发生在美国亚利桑那州菲尼克斯郊区的一个十字路口附近。当时,优步科技公司的一辆自动驾驶汽车正在公路上进行测试,车内坐有一名操作人员。汽车撞上了一名推着自行车过马路的女子。女子被送往医院后不治身亡。
遇难女子名叫埃莱娜·赫茨贝格,现年49岁。警方初步调查确认,事故发生时,肇事车辆正处于自动驾驶模式,行驶速度为大约64公里每小时,并且汽车没有减速迹象。优步科技公司已经暂停了自动驾驶汽车在北美地区的测试。
优步事故初步调查结果_原因
据科技网站The Verge报道,日前发生的优步自动驾驶汽车致行人死亡案例或事出有因,优步自动驾驶前高管对于技术“安全性能”不重视的冒进态度或还在影响自动驾驶团队。
早在2016年1月的采访中,前谷歌工程师安东尼·莱万多斯基(Anthony Levandowski)曾这样说道:“我们并不需要多余的刹车与转向装置,或者一辆炫酷的新车,我们需要的是更好的软件!要想更快获得更好的软件,我们需要尽快部署首批1000辆测试汽车。我不理解,为何我们公司(谷歌)不这么做,我们团队中部分人士看起来很害怕向这样转型。”不久之后,莱万多斯基便离开了谷歌,并成立了自己的自动驾驶卡车公司。紧接着,优步(Uber)便收购了该公司,莱万多斯基也成为优步自动驾驶团队的重要一员。
对于自动驾驶这一新兴技术,莱万多斯基并不是优步团队中唯一一个持有“快速行动、打破陈规”观点的员工。由于Waymo指控莱万多斯基窃取了谷歌14000份文件并非法使用谷歌的商业秘密,Waymo与优步之间关于自动驾驶商业秘密的诉讼大案也一度成为行业中的关注焦点。而正是由于诉讼案件,莱万多斯基的观点也更多得被公之于众。优步于2017年解雇了莱万多斯基,并在2018年2月与Waymo和解了诉讼案件。而优步的新任CEO看起来也更有诚意,试图扭转前任CEO特拉维斯·卡拉尼克(Travis Kalanick)有毒的企业文化。
虽然优步解雇了莱万多斯基,但是现在看来,莱万多斯基的“遗产”依旧笼罩在公司头上。
在2月份的庭审之中,Waymo代理律师向外界描述了这样一种工作情形:对于自动驾驶技术,领导所采取的更谨慎、更缓慢的做法遭到了员工的反对。Waymo CEO约翰·克拉夫西克(John Krafcik)表示,莱万多斯基执意认为转向以及刹车系统的多余组件是没有必要的。克拉夫西克在法庭上表示:“可以说,我们在自动驾驶汽车安全方面有着完全不同的观点。”
《纽约杂志》(New York Magazine)还曾报道称,莱万多斯基曾向优步的工程师们表示:“第一起自动驾驶致死案例不是我们引发的,我有点生气!”不过,之后,莱万多斯基否认了上述说法。2016年5月,在佛罗里达州发生了一起特斯拉Model S 自动驾驶事故,当时Model S冲入了一辆卡车车底,造成了Model S司机当场死亡。在诉讼案中,根据另一篇采访报道,莱万多斯基还曾表示:“由于太多的风险规避、缺乏紧迫感,我们团队的进展速度根本不够,我们需要提速!”
而莱万多斯基发送给卡拉尼克的短信也再次印证了其“急于求成”的观点。在其中一条短信中,莱万多斯基写道:“我们需要通盘考虑自己的战略,寻找所能找到的一切捷径。”另一条则写道:“我认为这是一场竞赛,我们需要赢得这场竞赛,而第二名则将是第一个失败者。”
卡拉尼克的回信也相当简洁:“攻城拔寨!(Burn the village)” 莱万多斯基也立马回复:“好的。”在庭审中,卡拉尼克表示他记不得当时聊天记录的情形了。不管这些对话内容怎样,是开玩笑还是郑重其事,但是,自优步自动驾驶汽车致行人死亡之后,莱万多斯基的言论记录在外界看来确实不怎么光彩!
优步的发言人则试图撇清莱万多斯基与公司之间的关系,并指出,现在公司的领导团队以及人员也出现了相当大的变动。该发言人表示:“我们认为,科技有能力使得交通运输比以往更安全,而且,对于保证民众安全的重大责任,我们一直有着深刻认识。优步的新领导团队早已向整个公司明确表态,要将安全置于我们公司的核心,这也是当前优步的运营准则。”
Uber所用的自动驾驶技术
从表面上看,除了整体系统出现故障外,很难理解为何会发生这样的致死事故,因为自动驾驶汽车在设计时就是为了防止这样的事故发生。
意外进入行驶路径的人或物几乎是自动驾驶汽车工程师首先考虑的突发事件。这种情况有很多,例如突然停下来的汽车、一只鹿、过路的行人。工程师在设计自动驾驶系统时会尽早发现他们,确认并采取适当措施,可能会减速、停车、迂回等。
Uber自动驾驶汽车配备了一整套传感器
Uber自动驾驶汽车配备了多个不同的成像系统,它们既可以执行普通任务(监控附近汽车、标记和车道线),也可以执行特殊任务,例如上述让汽车减速等措施。在这起事故中,能够拯救受害者的图像系统应该不少于四个。
1、顶部激光雷达
这个位于汽车顶部的桶状物体就是激光雷达系统,它能够以每秒多次的速度生成汽车周围的3D成像。激光雷达使用了红外激光脉冲,遇到物体后会反弹,返回到传感器,从而在白天或晚上相当细致地侦测静止和移动的物体。
大雪和浓雾会让激光雷达的激光器变得模糊,准确性会随着距离的变长而降低,但是在几英尺到几百英尺内,顶部激光雷达依旧是非常重要的成像工具,几乎存在于每辆自动驾驶汽车上。
顶部激光雷达生成的图像
如果顶部激光雷达单元运行正常,在没有被完全遮挡的情况下,它应该能够分辨出受害者。同时,汽车距离行人还有100多英尺远(30多米),可以把行人成像传送给“大脑”进行核对。
2、前端雷达
和激光雷达一样,雷达发出信号,等待它弹回,但使用的是无线电波,而不是激光。这使得雷达具有更强的抗干扰能力,因为无线电可以穿透雪和雾,但是也会降低分辨率,改变其距离像。
特斯拉自动驾驶系统Autopilot主要依赖雷达
根据Uber部署的雷达数量不同,它所提供的距离像可能存在巨大差异。Uber很可能在汽车前后部署了多个雷达,以实现360度无死角覆盖。如果Uber是为了给激光雷达提供补充,那么雷达与激光雷达的成像可能会存在大幅重叠,但是更多雷达可以用于侦测其他车辆和更大型障碍物。
3、短焦和长焦光学相机
激光雷达和雷达易于确定物体的形状,但并不擅长读取标记,理解物体颜色等。这个任务就交给了可见光相机,它内置了精密的计算机视觉算法,能够对成像进行实时分析。
Uber自动驾驶汽车上的这些相机密切关注标志着汽车刹车(突然亮红灯)、交通灯以及穿越十字路口行人的指示器标记。汽车前端尤其会使用多角度、多种类型的相机,这样才能获取汽车前进道路的完整图像。
侦测行人是工程师们试图解决的最常见问题之一,这种算法已经非常成熟。这一过程通常被称作“分割”图像,一般还会涉及标记、树木、人行动等。
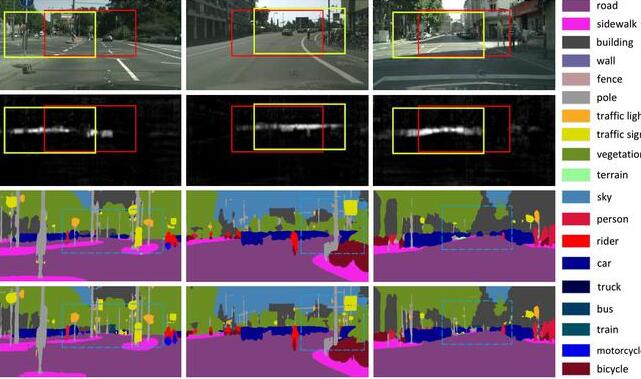
光学相机拍摄的图像
对于相机来说,夜间工作很困难,这是一个显而易见的问题。不过,这个问题交给前两个系统来解决,激光雷达和雷达能够在夜间工作。即便是在伸手不见五指的环境下,穿着全黑衣服的人也能够被激光雷达和雷达识别。随后,这些雷达就会向汽车发出警告,应该减速或者通过汽车大灯确认行人。这可能就是自动驾驶汽车通常没有夜间视觉系统的原因。
4、安全司机
人类很擅长发现障碍物,即便是人眼没有激光器。人类的反应时间不是最好的,但是汽车不会作出反应或者作出错误反应,经过训练的安全司机会作出正确反应。
值得指出的是,自动驾驶汽车中还有一个中央计算单元,它能够收集各个传感器提供的信息,然后生成一个更加完整的汽车周围环境成像。
正在测试的自动驾驶汽车
目前还不清楚这起悲剧发生时的具体情况,但是Uber自动驾驶汽车肯定配备了本可以侦测到行人的技术,本可以让汽车作出正确反应。而且,就算一个系统失效,另一个系统也应该能够发挥作用。
-
自动驾驶真的会来吗?2016-07-21 14107
-
优步自动驾驶事故_全球首例致死事故及分析2018-03-20 10877
-
公布Uber视频还原事故真相_自动驾驶安全吗2018-03-22 4405
-
Uber自动驾驶致死案调查:软件系统出了问题2018-06-26 1400
-
自动驾驶事故导致供应商陷入麻烦,自动驾驶技术还有待发展2018-07-20 832
-
丰田对优步投资5亿美元,双方建立合作关系共同开发自动驾驶技术2018-08-31 2682
-
优步无罪,驾驶安全员重点调查,但自动驾驶早已元气大伤2019-03-07 3267
-
优步与其自动驾驶汽车部门进行10亿美元投资 用于开发自动驾驶技术2019-04-19 1145
-
曝优步或收购计算机视觉初创公司以支持自动驾驶2019-06-22 662
-
优步自动驾驶测试车路测许可证恢复2020-03-11 2700
-
优步自动驾驶业务发展缓慢的原因是什么?2020-10-09 1972
-
优步将其自动驾驶研究部门出售给Aurora2020-12-08 1827
-
优步出售自动驾驶部门给竞争对手2020-12-24 2024
全部0条评论

快来发表一下你的评论吧 !
