

瑞萨机器人处理器RZT2H CR52双核BOOT流程和例程代码分析
描述
RZT2H是多核处理器,启动时,需要一个“主核”先启动,然后主核根据规则,加载和启动其他内核。本文以T2H内部的CR52双核为例,说明T2H多核启动流程。
LSI reset release时,其内置的BOOTROM总是从CR52_0开始执行,即我们可以把CR52_0定义为主核。如果系统配置为程序从External XSPI_FLASH 启动,BOOTROM首先根据存放在external Flash起始位置的Parameter中的定义,从Flash中加载Loader程序。
Parameters for the Loader:
存放在External Memory区域的起始位置,存放着与程序加载相关的关键信息,如例如在各个启动模式下,启动期间的CPU缓存设置,用于与外部存储器通信的引导外设(xSPI或SDHI)的配置以及加载程序的size等等。
Parameters for Loader的结构如下:
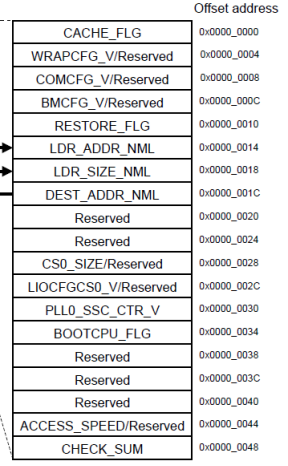
除了上述信息,其中DSET_ADDR_NML是跟多核启动相关的关键参数;该参数决定Loader Program的加载地址,而BOOTROM根据这个地址决定接下来在哪个核上,从哪个地址开始执行LOADER程序。
这里补充一下T2H程序结构和基本加载启动流程:
T2H平台,烧录到External Flash上的内容逻辑上分成3部分:
上述的Parameter for Loader;
Loader program;
Application program;
启动时,BOOTROM根据Parameter for Loader从Flash加载Loader program到指定位置开始执行,然后Loader program再加载Application program并跳转执行。
在T2H多核架构下(4xCA55+2xCR52)Loader parameter中的:DEST_ADDR_NML有2个可能的地址范围,即BTCM7或者7System SRAM:
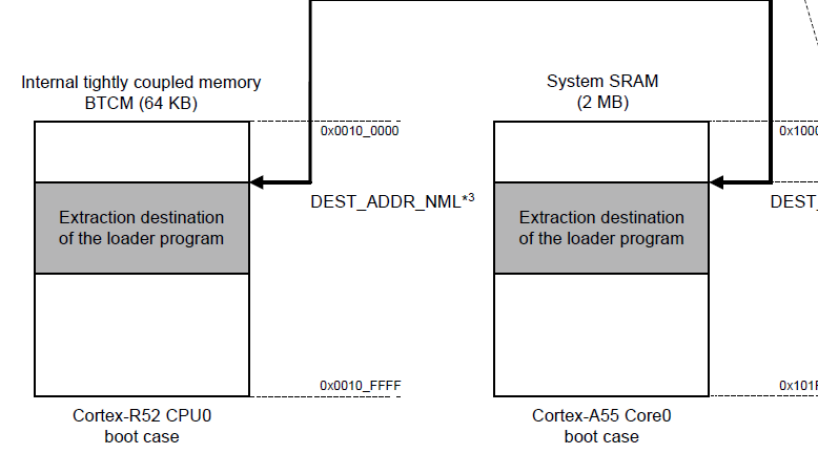
如果BOOTROM判断到加载地址是在BTCM中,那CR52_0继续执行(second boot CPU仍然是CR52_0),从加载地址开始执行LOADER PROGRAM,并完成整个启动流程。
如果BOOTROM判断到加载地址是SYSTEM,系统会认为second boot CPU是CA55_0,BOOTROM 就会Reset release CA55_0,并把CR52_0转换到WFI状态,然后让CA55_0执行Loader program。
以上介绍了在T2H多核系统中的主核First boot CPU和Second boot CPU的启动过程,但是其他的Core此时都还是在Reset 状态,等待 Second boot CPU为其加载程序和释放。
接下来以52双核为例,说明CR52_0如何完成自身程序加载和加载并启动CR52_1的过程;
在这个示例中,CR52_0用作Second boot CPU,以下步骤是CR52_0的Loader Program需要完成的工作:
根据FSP时钟树,配置LSI的各个Clock;
初始化Loader Program的Data段和BSS段;
配置ADDRESS_EXPANDER_INIT:
Address EXPANDER的作用是:通过映射的方法,使能32 bit Master访问4G area之外的地址空间,详见UM 13.4.5;
TrustedZone 400初始化;
COPY应用程序的PRG段/DATA段/BSS段,到相应的运行RAM空间。如果需要启动其他内核,则把其他内核的PRG/DATA,也COPY到对应RAM区域,然后Release目标内核;
核间通信用到的信号量初始化;
Master MPU初始化;
GIC初始化和系统定义的中断的初始化配置;
TFU初始化;
Main()跳转应用;
其中步骤5中启动目标CPU(CR52_1)
的步骤如下图:
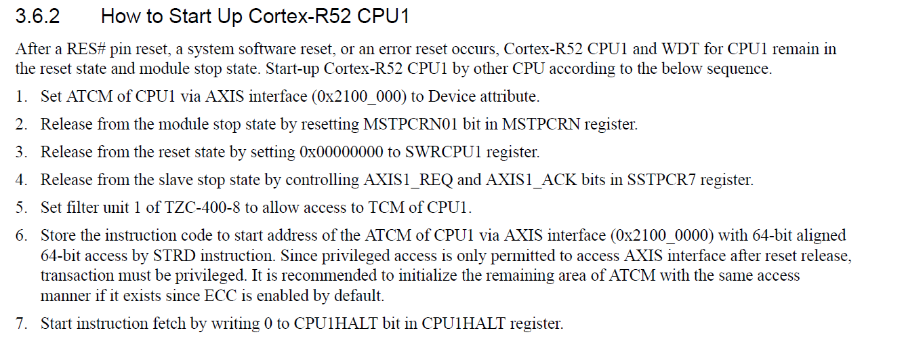
上述步骤中需要特别强调的地方:
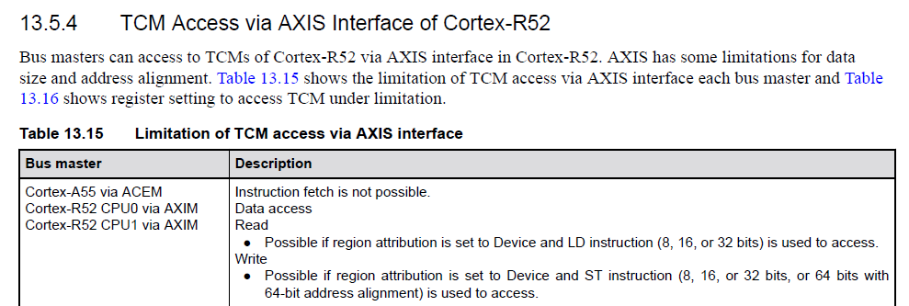
启动过程,需要从CR52_0访问CR52_1的ATCM空间。根据T2H的架构,这个访问只能通过AXI总线,且必须把CR52_1的ATCM region通过MPU配置为Device属性,并且只能使用LD和ST指令;
对应到代码中,上面的7个步骤在函数SystemInit()文件startup.c中都能找到对应的实现;
重点说明函数bsp_cpu_reset_release()该函数实现上述步骤的2,3,4,6,7;
重点分析步骤6:
代码段如下:
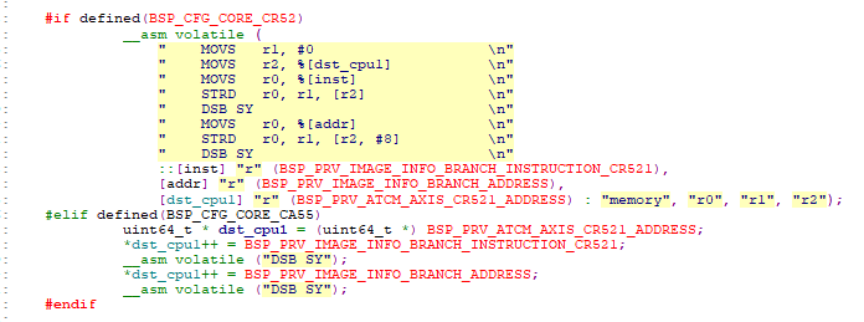
这段代码完成的动作:
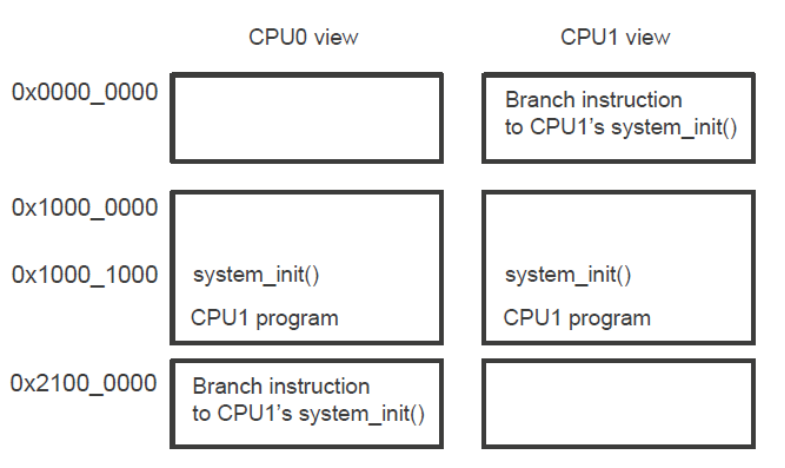
把1st分支指令[inst]经AXIS接口复制到CR52_1 ATCM的起始地址(dst_cpu1:0x2100_000);
复制跳转指令要用到的目标地址(addr);
操作到的存储地址如图示:
最后步骤7:

CR52_1跳转到入口函数system_init,开始执行:
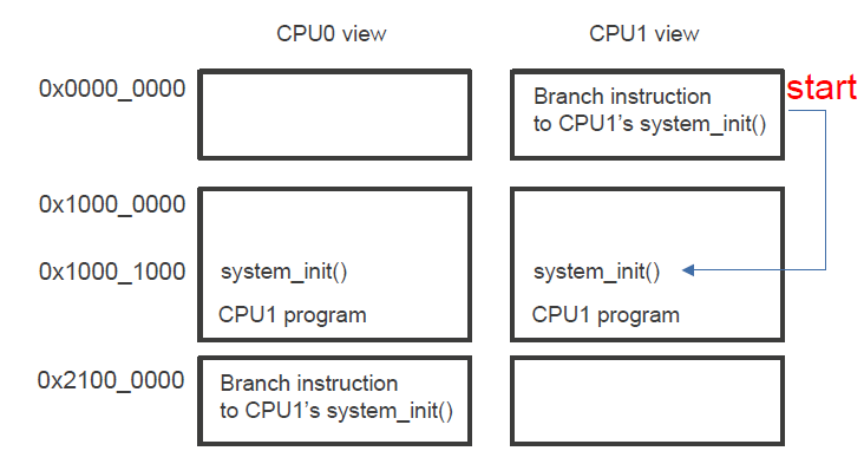
以上,以双CR52 Core为例,说明了T2H多核系统的BOOT流程。
延伸阅读:
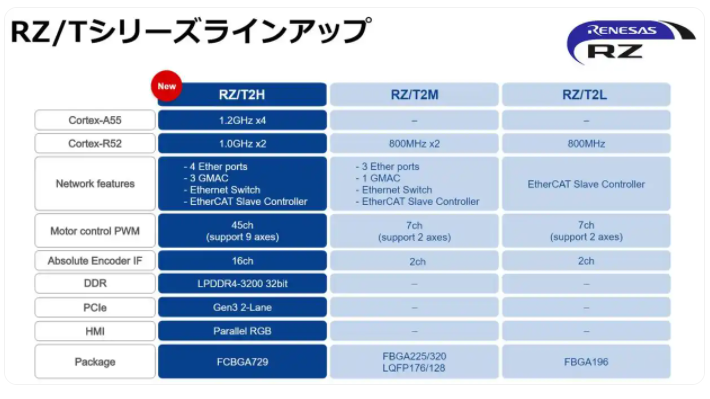
日本瑞萨电子此前量产面向工业设备的 MPU(微处理器单元)RZ / T2H,预计用于机器人等,号称 CPU 软件处理性能比以前提高了 20~30%。一个芯片可以同时控制最多 9 轴的电机。
RZ / T2H 的 CPU 采用四个 Arm Cortex-A55 内核,最高主频为 1.2GHz,支持 LPDDR4-3200 32bit 内存;实时 CPU 包括两个 Cortex-R52,最高主频 1GHz。
-
双足机器人2013-11-25 3289
-
基于ARM处理器的吸尘机器人硬件设计2018-11-06 2772
-
ARM处理器的机器人硬件设计方法2020-05-20 2853
-
什么是双核处理器2006-10-12 17884
-
AMD双核处理器,AMD双核处理器结构原理分析2010-03-26 1256
-
什么是双核处理器?2010-10-08 1293
-
瑞萨H3和高通8155对比分析2023-08-15 6325
-
瑞萨电子推出面向高性能机器人应用的RZ/V2H微处理器2024-03-08 2312
-
瑞萨电子推出高性能四核应用处理器2024-11-29 1711
-
新品发布 | 瑞萨电子推出高性能四核应用处理器,增强工业以太网与多轴电机控制解决方案阵容2024-11-30 1551
-
AI MPU# 瑞萨RZ/V2H 四核视觉 ,采用 DRP-AI3 加速器和高性能实时处理器2025-03-15 7349
-
RZT2H CR52双核BOOT流程和例程代码分析2025-04-03 3217
-
瑞萨RZ T2H更换DDR流程和工具介绍2025-06-27 3092
-
瑞萨系列-米尔RZ/T2H核心板开发板 高端MPU,驱控一体单芯片方案2026-03-19 1995
-
RZ/T2H和RZ/N2H MPU:工业级应用的高性能之选2026-04-01 542
全部0条评论

快来发表一下你的评论吧 !
