

基于Atmega 8单片机的车辆加速减速PID控制
控制/MCU
描述
本文介绍汽车自动巡航控制系统的结构组成和工作原理,选择基于Atmega 8单片机的PID控制策略实现车辆的稳定行驶及加速、减速的控制过程。本系统能有效地减轻长途驾驶中驾驶员的工作强度,提高舒适性,并减少燃料消耗,利于环保。
据调查,10%的交通事故是由疲劳驾驶、操作不当引起的,本文介绍的汽车自动巡航控制系统可以有效地减轻驾驶员的疲劳,避免交通事故,并利于环保。当在高速公路上长时间行驶时,打开该系统的自动操纵开关后,巡航控制系统将根据行车阻力自动增减节气门开度,避免驾驶员频繁踩油门踏板就可使汽车行驶速度保持一定,大大地减轻了驾驶员的疲劳强度。由于巡航控制系统能自动地维持车速,避免了油门踏板不必要的人为变动,进而减少了汽车燃料的消耗和废气的排放。
1 汽车巡航控制系统的构成
汽车电子自动巡航控制系统主要由巡航控制开关、车速传感器、电子控制单元(ECU)、汽车制动开关、执行器等组成。电子自动巡航控制系统的组成部分及各部分在汽车内的安装如图1所示。
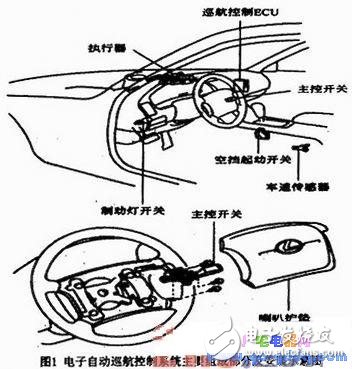
下面将具体介绍各部分结构原理及功能。
(1)巡航控制开关。当接通主开关后,若车速在巡航控制的范围内(一般为40~200km/h)时,断开“设定/滑行”开关,此时车速会存储于RAM中,汽车维持此速度稳定行驶。当驾驶员希望巡航的车速提高时,接通“恢复/加速”开关,巡航控制ECU就会通过执行器使节气门的开度增大,使汽车加速行驶,此时,存储汽车实际车速参数的RAM存储器处于动态刷新状态,开关断开瞬间时的车速存储于存储器,之后汽车将以此速度匀速行驶;当驾驶员希望稳定的车速降低时,接通“设定/滑行”开关,巡航控制ECU就会通过执行器使节气门开度关小,汽车减速滑行,此时存储汽车实际车速参数的RAM存储器处于动态刷新状态,开关断开瞬间时的车速存储于存储器,之后汽车将以此速度匀速行驶。
(2)巡航控制ECU。用于接收各个传感器送来的信号,再经计算、加工处理后,向执行器发出指令,控制执行器的动作。
(3)空档启动开关。用于控制是否使汽车立即退出巡航控制状态。
(4)制动开关。安装于制动踏板处,用于向巡航控制ECU传送制动信号(即驾驶员踩下制动踏板的信号)以使汽车迅速退出巡航控制状态。
(5)车速传感器。车速传感器采集实际实时车速信号,作为电子控制单元的输入量。
2 巡航控制系统的工作原理
图2是一种典型的双闭环汽车电子巡航控制系统原理框图。由图2可知,控制器的输入是设定的固定车速信号与实际车速的反馈信号之差。ECU将这两种信号进行比较,得出误差信号,经放大、处理后成为节气门控制信号,送至节气门执行器,驱动节气门执行器工作,调节发动机节气门开度,以修正实际车速,从而将实际车速很快调整到驾驶员设定通常将汽车在平坦路面上行驶时车速与节气门开度的关系存储在巡航控制系统ECU的ROM中。巡航控制系统根据目标车速自动维持汽车恒速行驶。
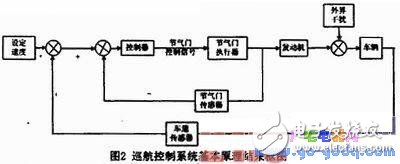
汽车在巡航定速状态下,当汽车速度下降时,ECU加大节气门开度,使发动机功率升高,转矩增大,车速达到设定速度。反之,减小节气门的开度。系统进行巡航控制时,若在平坦路面上车速为v,按下设定开关进入巡航控制的自动行驶状态,一旦遇到爬坡时,则行驶阻力增加,如不进行调节控制,车速就会降低,此时巡航控制器会按照一定的控制规则使节气门开度变大,使车速稳定在v,重新取得动力平衡。当遇到下坡时,行驶阻力减小,巡航控制系统调节节气门的开度变小,使车速保持在v取得平衡。因此,即使行驶阻力发生变化,车速也只在很小范围内变化,达到稳定行驶的目的。当车速超出特定上下限时,巡航系统不工作。这个上下限的范围并不固定依车型的不同而略有差别。
当系统的传感器出现故障,或控制信号电路被切断时,传感器输出为零,此时车速超出特定上下限,巡航控制系统停止工作。
3 汽车巡航系统控制算法的选择
PID控制作为最早发展起来的控制策略经由长时间的不断发展和改进,具有结构简单、鲁棒性好、可靠性高、参数易于整定等优点。因此在工业控制中PID算法具有最广泛的应用。本次设计选择PID控制策略实现巡航系统的定速功能。
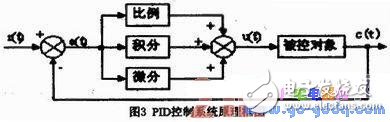
下面介绍PID控制器各校正环节的作用。
(1)比例环节。根据控制系统的偏差信号e(t),并按一定的比例产生控制作用,以减少误差。
(2)积分环节。主要用于消除静差,提高系统的无差度。积分作用的强弱取决于积分时问常数,积分时间常数越大,积分作用越弱,反之,则越强。
(3)微分环节。能反映偏差信号的变化趋势(变化速率),并能在偏差信号值变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减小调节时间。
在数字计算机控制系统中,使用数字PID控制器,数字PID控制算法又分为位置式PID控制算法和增量式PID控制算法。两种控制算法相比较而言,当计算机只输出增量时,增量式PID控制算法计算机误动作造成输出变化小,控制状态的切换冲击也小,算式中不作累加运算,增量只与最近的几次采样有关,控制效果明显优于位置式PID控制算法。因此选择增量式数字PID控制算法。
4 硬件设计概述
本文所介绍的汽车自动巡航系统输入量:实际车速、节气门开度、发动机转速、制动开关(当制动开关有效时系统设定值是设定车速)。选用Atmega 8单片机作为控制核心,执行器采用直流电动机。控制过程如下:设定速度和实际车速输入、比较产生偏差,通过PID算法整定,结合其他输入量处理后的信号,由Atmega 8单片机PWM通道驱动直流电动机转速而改变气节门开度,实现车速的控制。
出于安全考虑,在硬件设计上将制动开关与节气门执行器直接相连,这样当踩下制动踏板时,在停止单片机恒速控制程序的同时,将巡航控制系统与节气门拉索断开。
系统硬件电路主要由微处理器、电源电路、离合器和直流电机驱动电路、保护电路、A/D转换电路和输入信号处理电路等部分组成。Atm ega 8微处理器是系统的核心。汽车巡航控制系统中多处用到传感器进行信号采集,所需传感器主要包括车速传感器、节气门位置传感器、制动踏板传感器、离合器踏板传感器等。
车速传感器采集的速度信号是车辆巡航控制系统最重要的输入信息之一。车速传感器将采集的车速模拟信号转化为数字量输送给巡航控制ECU,作为反馈信号与设定值比较处理后产生输出信号,驱动执行器达到控制要求。对车速传感器的要求是实时性、准确性、可靠性。
节气门位置传感器的功能是采集节气门位置信号。在该系统中节气门位置测量选用电位器式角位移传感器,在传感器和微处理器之间有A/D转换电路,将传感器输出的电压信号先转换为数字量,再由微处理器进行处理。
制动踏板传感器安装在制动踏板下,用于获取制动踏板动作信号,以决定是否退出巡航系统。
离合器踏板传感器安装在离合器踏板下,用于获取离合器踏板动作信号。
5 系统软件流程
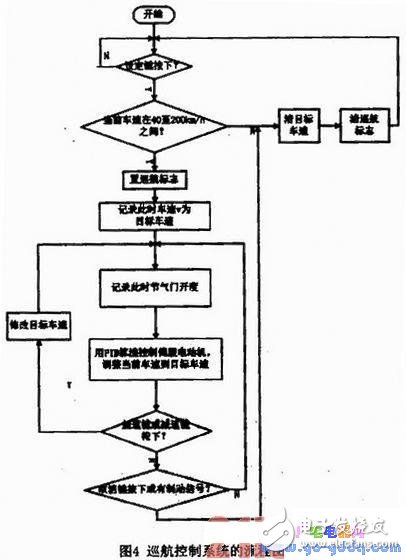
巡航控制过程如图4所示。在汽车电子巡航控制系统中,实际车速信号反馈至电子控制器,并与设定车速进行比较,因而系统工作在闭环控制方式,采用的控射方法是增量式PID控制策略。通过对单片机编程调节直流电机的转速和节气门的开度,使车速在允许的误差范围内保持稳定。
为清晰阐述汽车自动巡航系统的软件设计,下面从模块化角度说明单片机软件编程部分的组成,单片机编程涉及的模块主要有初始化模块、键盘扫描模块、启动判断模块、通讯模块、中断模块、定时模块、看门狗模块等。
系统检测是否有按键按下,当巡航开关接通时,启动判断程序判断车速采集程序获得的车速信号是否在可巡航的范围内,此时设定键有效时,实际车速需维持在此时速度。定时程序块实现定时,达到定时点时间时发生中断,采集实际车速与设定值比较,若差值在误差允许范围内不动作,若不在,则进入电动机转速控制的程序段实现车速整定。当检测到加速或减速按键按下时,首先修改车速设定值,然后进入电机转速控制的程序段实现加速或减速;当检测到制动开关接通时退出巡航控制系统。
6 结论
本文将PID控制算法与Atmega 8单片机相结合,应用于汽车自动巡航控制系统的研究,有效地实现车辆在误差允许范围内的稳定行驶,可以减轻长时间驾驶旅途中驾驶员的劳动强度,进而减少交通事故的发生。
-
基于ATmega8单片机烘干系统自动控制2023-10-12 532
-
请问51单片机如何控制步进电机加速、减速及反转?2021-10-18 1371
-
基于单片机的pid控制程序简介2021-06-17 1448
-
ATmega16单片机教程之ATmega16单片机定时器的分析与设计应用概述2018-12-07 2245
-
如何使用ATmega16单片机实现步进电机加减速控制的资料概述2018-11-15 1622
-
如何使用AVR单片机进行自整定PID控制器的设计2018-11-02 1619
-
模糊PID的单片机温度控制系统的设计2018-04-28 1773
-
AVR单片机PID控制电机程序2018-03-30 1218
-
温度PID控制源码——基于51单片机2017-04-12 2332
-
单片机的PID控制方法2016-08-30 1128
-
单片机控制步进电机加减速2012-12-21 2049
-
基于ATmega16单片机的步进电机加减速控制2012-08-27 22685
-
基于AVR单片机和LabVIEW的水温控制系统2011-09-27 1486
全部0条评论

快来发表一下你的评论吧 !
