

一文深度剖析惯性导航在车载GPS卫星导航中的应用
描述
一、GPS卫星导航
GPS卫星导航,是根据GPS卫星提供的位置信息,以及导航前规划的线路,指引用户行驶的一个系统。
二、惯性导航
之前有介绍,惯性导航其实是最早使用的导航系统之一。 惯性导航是一种通过测量运动物体的加速度,并自动进行积分运算,获得运动物体瞬时速度和瞬时位置数据的技术。 惯性导航系统一般安装在运动物体内部,工作时不用依赖外界提供信息就能进行导航,不易受到干扰,是一种自主式导航系统。
惯性导航的优势和限制:
惯性导航具有体积小、成本低、精度高、不依赖外界信息、抗干扰能力极强、隐蔽性好等特点。
惯性测量装置一般包括加速度计和陀螺仪。加速度计是测量物体的加速度,陀螺仪又被叫做角速度传感器,是测量角速度的。利用这些装置记录的参数就可以计算并导航了。 但是由于采样频率一般很高(一秒内几十甚至几百次),所以累加起来误差很容易扩大,所以长时间使用惯性导航会导致误差很大,所以惯性导航适合在短时间内使用。
惯性导航的应用:
日常车载GPS卫星导航中,常常会经过地下停车场、隧道、高架桥、密林小路、高楼林立的窄道等地段,导航突然不动了,直到把车开到开阔的天空下,导航中的车位图标才突然跳过去,体验很不好。
在失去位置的时候,惯性导航软件知道速度、车辆的位置、行驶路线等信息。结合加速度传感器提供的加速度,可以根据二次积分的方式计算出加速度产生的位移,然后根据初始速度计算出速度产生的位移,进而推算出车辆最新的位置。这样,在没有GPS卫星信号的情况下仍然可以使用惯性导航。
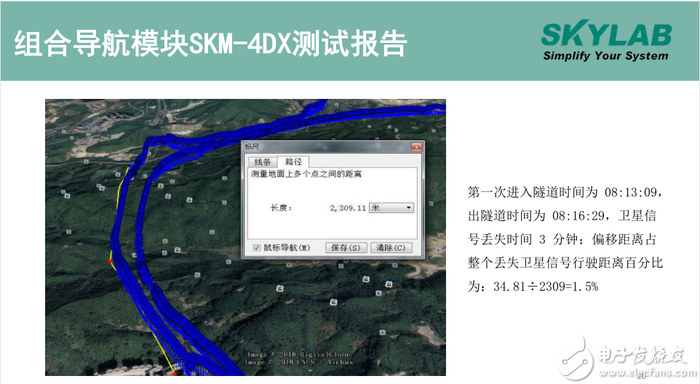
所以在车载导航领域,惯性导航以后的应用多是和GPS卫星导航结合起来使用
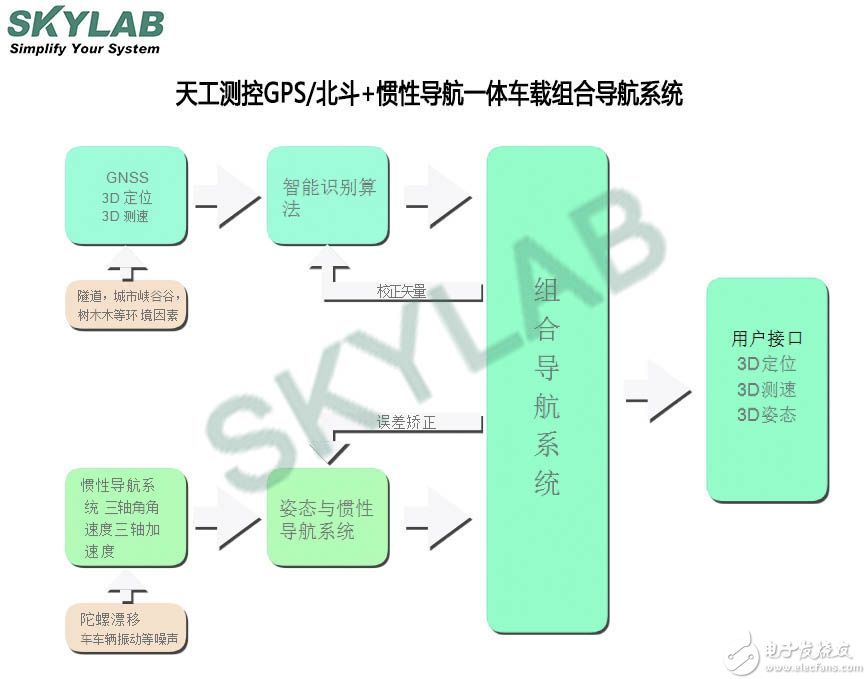
天工测控的惯性导航+GPS卫星导航一体的车载组合导航系统SKM-4DX
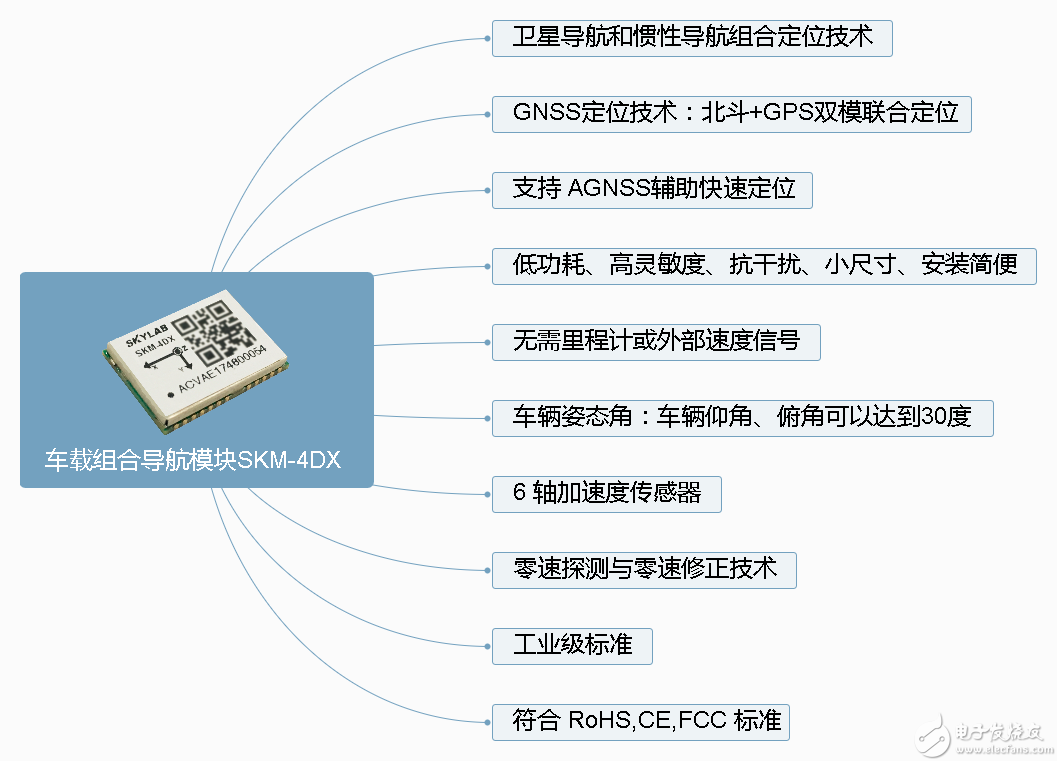
三、6轴加速度传感器
GPS是通过接收卫星发送的信号计算出自身位置的,当GPS导航设备被遮挡后,GPS设备就无法定位了。
遮挡的情况很多,比如车顶、高架桥、房屋、隧道、地下停车场等。这时候可以通过速度、时间、距离的关系,根据最后一次GPS信号计算的速度,来推测可能的位置。
如果在隧道内、高架桥梁下等地段车辆是匀速运动,这个方法可能很好的实现导航。但是如果减速了,就会出现地图上的车位很快的跑到了隧道终点,然后停下来等着。反之,如果加速了,就会出现车位走了一半,然后突然跳出隧道。
要解决这两种情况就需要加速度传感器。有了加速度,就能更好的推测当前的速度,从而解决上述问题。
加速度传感器是一种能够测量加速力,将加速度转换为电信号的电子设备。它是利用牛顿第二定律A=F/M,通过作用力造成传感器内部敏感部件发生变形,通过测量其变形并用相关电路转化为电压输出,得到相应的加速度信号。
惯性导航系统SKM-4DX的硬件基础是BMI160,它将加速传感器与陀螺仪的结合于一体,具有理想的信噪比,使得惯性测量组件可提供精确、可靠的测量结果。
四、30度车辆姿态角
SKM-4DX导航模块利用多年对MEMS惯性器件的研究经验,通过自适应滤波算法实现了对陀螺仪漂移和加速度震动信号的滤波,并进一步可以获得高精度的姿态信息,从而可以满足坡道检测等车辆监控和导航应用的各种需求。车辆仰角、俯角可以达到30度。
五、组合导航模块的应用场景
(1)用在地下公交站的准确定位和导航,比如在深圳福田交通枢纽,在公交车上应用此卫星+惯性导航模块,公交车可以在地下准确报站;
(2)隧道里面提供速度校准,避免刚出隧道时非正常超速;
(3)提高地下停车场的定位,结合停车场地图,可以准确寻车。
(4)高端前装车辆开始追求更高精度的定位,特别是城市峡谷和高架桥
下等弱信号场景。
-
车载用及手持式GPS导航技术2009-10-05 5790
-
高性能单片机车载惯性和GPS组合导航模块2017-08-30 3984
-
深度解析惯性导航和GPS卫星导航结合的应用2018-03-26 4352
-
GPS北斗卫星+惯性组合导航模块的优势分析2019-07-15 3068
-
ADXL202和GPS怎么组合成车载导航系统?2019-10-25 2075
-
详解GPS导航系统中的惯性技术2020-06-13 4439
-
惯性导航模块特征和 优势有哪些?2020-08-13 2416
-
惯性导航的前世今生分析2020-08-14 2067
-
惯性导航和GPS卫星导航结合的车载组合导航模块资料2018-03-21 1637
-
惯性导航+GPS北斗导航一体的车载组合导航模块规格书2018-03-22 1595
-
看GPS+惯性组合导航模块怎么解决传统GPS导航5大信号难题2018-07-16 9376
-
揭秘:GPS北斗卫星+惯性组合导航模块有哪些优势呢?2018-09-26 5865
-
VD-G102面向车载导航领域的车载组合导航模块数据手册免费下载2018-10-26 1509
-
GPS组合惯导与惯性导航的的应用特点2020-06-11 5552
-
GPS组合惯导与惯性导航的的应用2020-03-28 4751
全部0条评论

快来发表一下你的评论吧 !
