

伺服控制电路简单设计制作
工业控制
描述
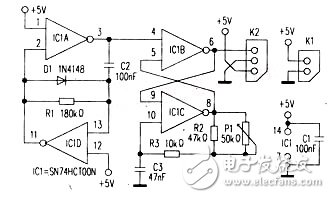
本电路由负脉冲振荡器 ( 与非门 IC 1A 与 IC1D) 、和 RS触发器 ( 与非门 IC1B 与 IC 1C ) 组成。伺服控制信号从 RS 触发器的⑥脚输出。
振荡器输出重复频率约 50Hz 的负脉冲信号。这些窄脉冲送到触发器的输入端,每隔 20ms 触发一次。当负脉冲到达触发器输入端 ( ④脚 ) 时, IC 1C 的输出变成低电平。 C3 经 Pl 放电,放电后触发器的状态恢复, IC1B 的输出由高电平回到低电平,每隔 20ms 重复一次。状态的恢复时间由 P1 调整。
伺服控制器就是常用的闭环控制系统,给伺服控制器发送不同的脉冲实现不同的速度位置控制即可。一般是脉冲和模拟量控制,有速度PID 转矩PID,伺服还具有反馈,会对反馈信号和输出信号进行比较,很好的闭换控制,精度高。
闭环控制系统:闭环控制系统,又称反馈控制系统,是由信号正向通路和反馈通路构成闭合回路的自动控制系统。这是一种自动控制系统,其中包括功率放大和反馈,使输出变量的值响应输入变量的值。数控装置发出指令脉冲后,当指令值送到位置比较电路时,此时若工作台没有移动,即没有位置反馈信号时,指令值使伺服驱动电动机转动,经过齿轮、滚珠丝杠螺母副等传动元件带动机床工作台移动。装在机床工作台上的位置测量元件,测出工作台的实际位移量后,后反馈到数控装置的比较器中与指令信号进行比较,并用比较后的差值进行控制。若两者存在差值,经放大器后放大,再控制伺服驱动电动机转动,直至差值为零时,工作台才停止移动。这种系统称为闭环伺服系统。
用图中的元件值, RS 触发器的状态恢复期可用 P1 从 0.6 - 2ms 范围进行调整,相应伺服机械的旋转角度可达 120 °。
- 相关推荐
- 伺服控制电路
-
常用控制电路制作2010-05-27 0
-
有没有制作控制电路的公司?2016-03-19 0
-
简易实用水位控制电路及制作2009-04-14 1154
-
光电耦合定时控制电路及制作2009-04-14 639
-
制作模拟自然风控制电路图2009-01-21 1586
-
伺服电机转速控制电路2009-04-26 4843
-
简单实用的音乐彩灯控制电路图2009-05-25 1853
-
伺服机构自动搜索及控制电路图2009-07-02 550
-
有简单人工智能的温度控制电路2009-07-27 733
-
单片机输出控制电路的制作2011-03-08 21610
-
伺服系统脉冲控制电路2011-11-03 3622
-
如何使用51单片机制作硬盘控制电路?包括控制电路和程序2018-10-10 1073
-
两款伺服电机控制电路图2020-01-09 37761
-
如何使用BA328设计制作一个音调控制电路2020-05-05 7296
-
简单的音调控制电路2022-07-28 667
全部0条评论

快来发表一下你的评论吧 !
