

移动机器人电机控制DEMO(原理图+BOM+PCB)
描述
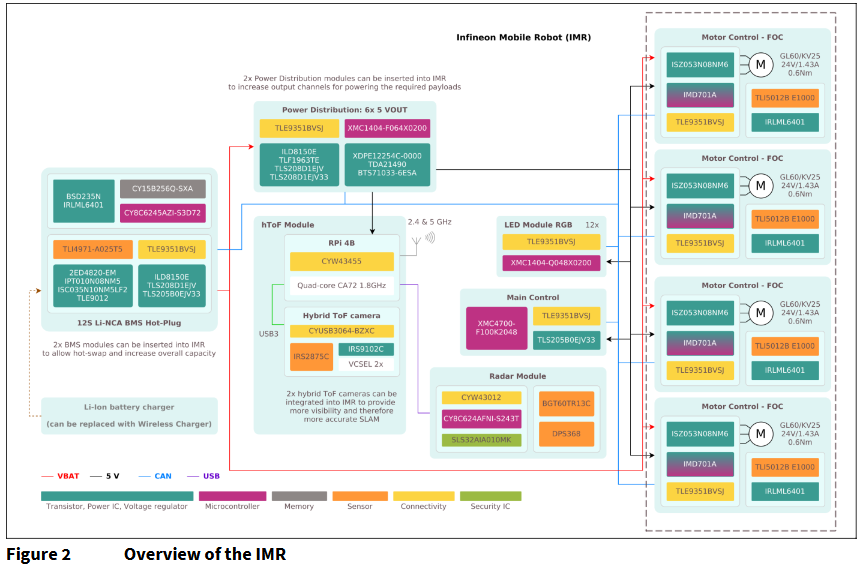
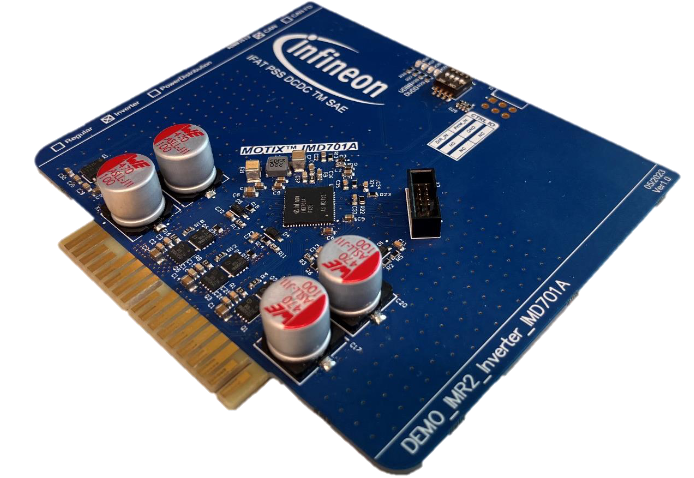
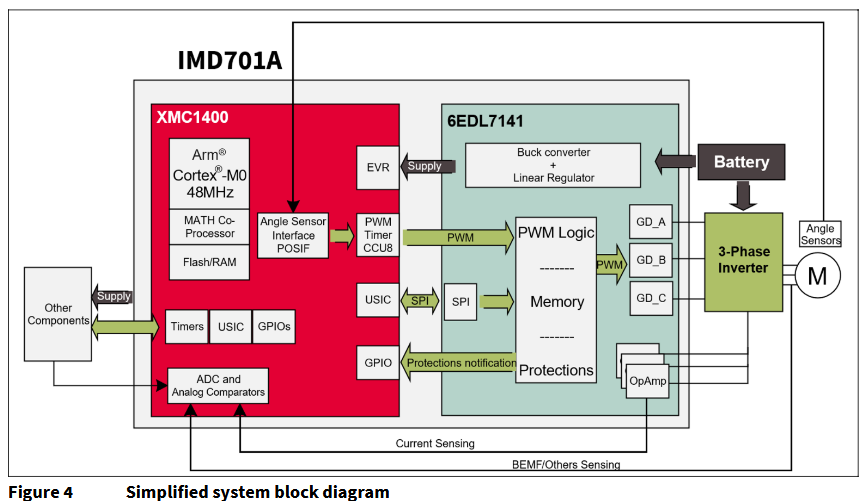
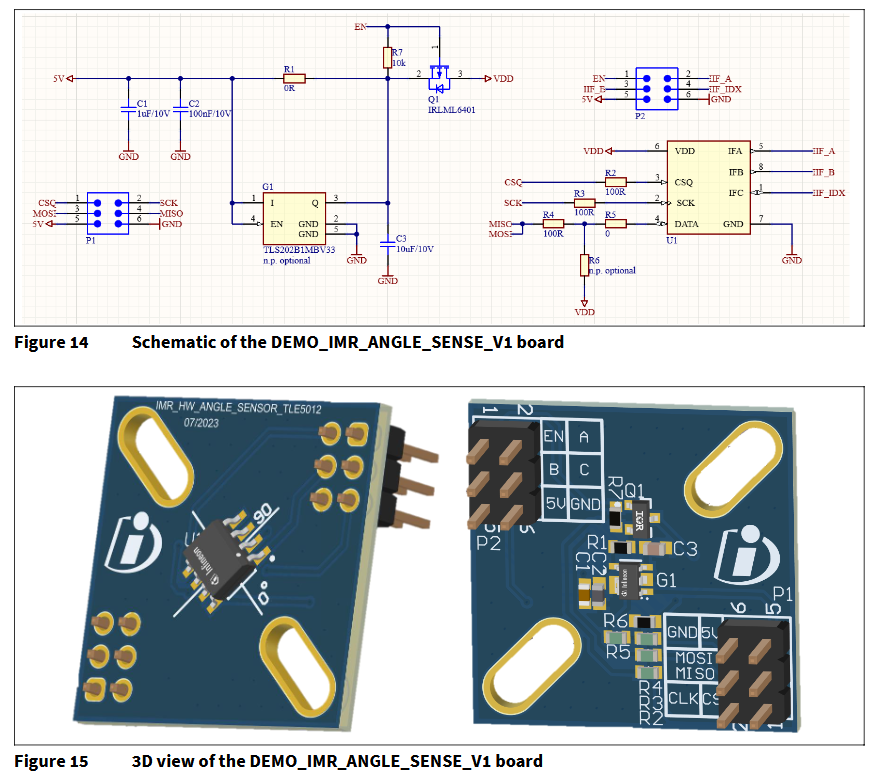
英飞凌移动机器人电机控制演示板可为采用英飞凌元器件的自主服务机器人功能提供演示平台。这些板可以组合起来创建此平台。DEMO_IMR_MTRCTRL_V1是一种高效、小巧的解决方案,用于控制电机,使机器人能够四处移动并执行所需的任务。MOTIX™IMD701A完全可编程电机控制器充分彰显了英飞凌在这一领域的专长,该控制器结合了XMC1404微控制器和MOTIX™6EDL7141三相栅极驱动器IC,大大降低了BOM,实现了更紧凑的设计。DEMO_IMR_ANGLE_SENS_V1配备了XENSIV™TLE5012B E1000,后者是一款360° 磁性角度传感器,可检测磁场的方向。这项检测的实现方式是使用单片集成式巨磁阻 (iGMR)
元件测量余弦和正弦角度分量。这些原始正弦和余弦信号经过内部数字处理后,可计算出安装在电机轴上磁体的磁场角度方向。
*附件:移动机器人电机控制DEMO设计文件 原理图,bom, PCB.pdf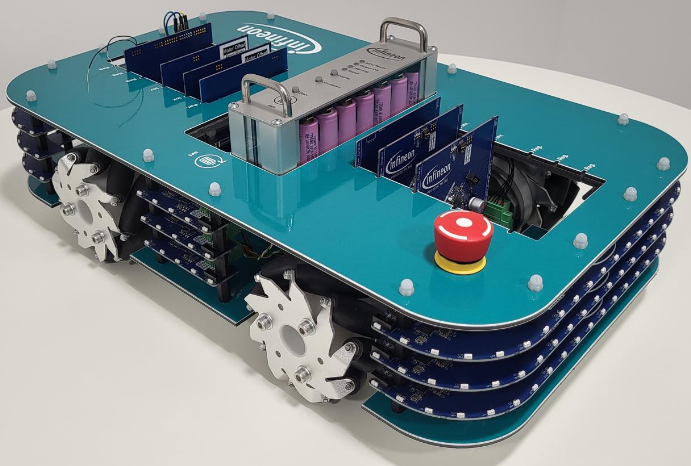
特性
- DEMO_IMR_MTRCTRL_V1
- 完全集成的BLDC电机驱动器
- 集成和配置栅极驱动器输出
- 独立工作或通过GUI
- SVPWM FOC算法
- 18 V到 60 V 工作电压
- 连续电流和最大电流:5A和7A
- 控制频率:20kHz
- 使用POSIF实现传感
- 三相低侧电流测量
- 高效率
- 小尺寸
- 减少元器件数量
- DEMO_IMR_ANGLE_SENS_V1
- 基于GMR的原则
- 集成磁场传感
- 360°角度测量
- 两个高精度单比特SD-ADC
- SSC和增量接口 (IIF)
- 灵活连接
- 可配置输出引脚
- 内部自动校准算法
应用
- 移动机器人(AGV、AMR)
- 机器人技术
- 机器人开发平台(英飞凌移动机器人 (IMR))
DEMO_IMR_MTRCTRL_V1布局
DEMO_IMR_ANGLE_SENS_V1布局
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- 热点推荐
- 电机控制
-
Infineon移动机器人电机控制方案深度解析2025-12-18 713
-
轮式移动机器人电机驱动系统的研究与开发2025-06-11 402
-
移动机器人电机控制DEMO (原理图+BOM+PCB)2025-05-20 2827
-
基于Matlab和VR技术的移动机器人建模及仿真2023-09-20 830
-
移动机器人的三种主要运动系统2021-09-01 2259
-
什么是移动机器人软硬件系统问题2021-08-06 2537
-
请问怎么设计一种室外移动机器人组合导航定位系统?2021-04-19 3004
-
如何实现移动机器人的设计?2020-11-23 3333
-
家庭移动机器人避障常用传感器及相关技术2020-05-14 3825
-
labview控制移动机器人2019-03-21 5388
-
机器人、协作机器人和移动机器人,你分的清楚吗2018-10-30 4151
-
Labview My RIO 移动机器人2016-08-21 13668
-
资料:移动机器人能否自动充电?2016-01-20 5192
全部0条评论

快来发表一下你的评论吧 !
