

一文看懂pd控制器的参数整定
电子常识
描述
在化工、冶金、机械、热工和轻工等工业过程控制系统中,PID(比例P、积分1、微分D)控制器是最常见的一种控制调节器。在工业过程控制中,90%以上的控制回路具有PID结构,PID 调节的最终目标是使系统达到稳定状态,使最大动态偏差尽可能小、调节时间最短、调节过程系统输出的误差积分值最小等等。
pd控制器的参数整定
在实际的应用中,最多的是通过凑试法来确定PID 的参数,增大比例系数P,将加快系统的响应,在有静差的情况下有利于减小静差,但是过大的比例系数会使系统有较大的超调,并产生振荡,使稳定性变坏。增大积分时间有利于减小超调,减小振荡,使系统的稳定性增加,但是系统静差消除时间变长。增大微分时间有利于加快系统的响应速度,使系统超调量小,稳定性增加,但系统对扰动的抑制能力减弱。在凑试时,可参考以上参数对系统控制过程的影响趋势,对参数调整实行先比例、后积分,再微分的整定步骤。
首先整定比例部分。将比例参数由小变大,并观察相应的系统响应,直至得到反应快、超调小的响应曲线。如果系统没有静差或静差已经小到允许范围内,并且对响应曲线已经满意,则只需要比例调节可。如果在比例调节的基础上系统的静差不能满足设计要求,则必须加人积分环节。在整定时先将积分时间设定到一个比较大的值,然后将已经调节好的比例系数略为缩小(一般缩小为原值的0.8),然后减小积分时间,使得系统在保持良好动态性能的情况下,静差得到消除。在此过程中,可根据系统的响应曲线的好坏反复改变比例系数和积分时间,以期得到满意的控制过程和整定参数。如果在上述调整过程中对系统的动态过程反复调整还不能得到满意的结果,则可以加入微分环节。首先把微分时间设置为0,在上述基础上逐渐增加微分时间,同时相应的改变比例系数和积分时间,逐步凑试,直至得到满意的调节效果。
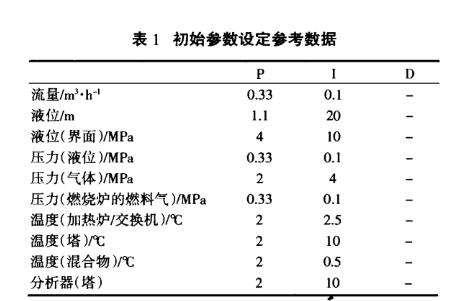
根据多年的施工经验,针对不同的控制对象可以设定初始调整参数,见表1;再不断改变参数的大小,同时观察输出的变化趋势,直到输出达到- 一个相对稳定的状态为止。通常塔或加热器的温度控制在参数调整时要比简单的流量控制复杂的多。对于温度或压力控制器而言,当其量程范围不同时,其增益的初始值也不同。例如对于同一一个控制过程和同一种规格的控制阀,温度量程为0~1000C的增益应为温度量程为0~100C的10倍。,这一点同样适用于压力控制器。
普通回路的规则
1、流量回路
在工业过程控制的PID回路中,大约一半是流量回路。在流量回路的控制器整定时,一般先将I设为0.1min,再将增益设为0.33,根据输出的变化趋势,不断调整增益的大小,有时可能由于现场仪表的质量不好,使输出无法稳定,那么将增益设为0.1,边观察边调整,直到输出达到一个相对稳定的状态为止。对于现场阀已安装阀门定位器的回路的增益是未安装远程位置调节器的回路的增益的2到3倍。流量回路的PID 控制器不能用微分调节。当阀或其他最终控制元件处于全开或全关的状态时,控制器无法起到正常的调节作用。
2、液位回路
在PID 回路中,除了流量最为普遍的便是液位。在液位回路的PID调节过程中应注意的是积分时间不能设的太小。如果将积分时间设的太小,回路将会以10~15 min 的时间进行循环,循环的周期大小与积分时间成反比例关系。大约80%到90%的液位回路将积分时间设为10min,回路都会达到一个相对稳定的状态。在液位的PID控制中,不能用积分控制。只有在某些极其特殊的情况下才会用到积分控制,比如:在液位控制阀具有大滞后的情况下,才用积分对其进行补偿控制,以消除由于干扰而使阀位发生的抖动。
3、压力回路
气体压力的控制回路的PID 参数的调整与液位回路类似。液体压力的控制回路的PID 参数的调整与流量回路类似。
复杂控制回路的规则
对与复杂控制回路有两种方式对参数进行调整。第一种是先设一个安全的增益值,再将积分时间设为5~10min之间的某一个数值,微分不用设。当测量值接近设定值时将控制器的控制方式由手动变为自动。如果控制变量发生周期性的循环,每个周期的波峰值到波峰值的时间就是该控制回路的控制周期。
如果下一个周期的波峰值比前一个周期的波峰值远离设定值,这时需要将增益减少到原值的二分之一到三分之一,直到周期停止扩张。如果积分时间小于周期的一半,容易引起循环,此时需增大积分时间。周期随着积分时间的增大而变小。当周期达到积分时间的2倍时,循环将被抑制,此时回路便达到稳定状态。,观察一段时间以确保该回路真正的达到稳定状态。
结束语
在PID 参数整定的过程中,由于参数的整定不合适,就会不稳定,或过分的稳定,在有外扰的情况下,偏差产生到复归需要很长的时间,这也是不允许的。进行控制的目的有:没有静差,稳定,响应快,动作均匀,要想充分满足这些条件,就必须对控制系统进行调整。可是在实际情况下,要同时满足这些条件非常困难,只有依其过程特性,把最重要的条件作为目标,对制系统进行调节在实际中由于工况的不同,回路在参数调节的时候,要具体情况具体对待,在实际的调节过程中要灵活运用PID 参数,以达到最优的控制效果。
- 相关推荐
- 热点推荐
- PD控制器
-
FOA优化算法整定PID控制器参数2021-08-30 1872
-
PID控制器的参数整定2021-02-09 6458
-
PID-PID控制器参数整定与实现2020-05-12 1680
-
PID控制的理论和PID控制器设计的及PID控制器参数整定的以及分析2019-12-04 2051
-
伺服电机控制器的参数整定2018-11-01 3239
-
PID控制参数的原理和整定的的计算方法整定PID参数的方法和概述2018-05-31 2493
-
比例谐振控制器参数整定方法及其应用_亚辛2017-03-19 1922
-
基于MATLAB的PID控制器参数整定及仿真2016-11-18 926
-
PID控制器参数整定方法及其应用研究2016-03-31 658
-
基于免疫原理的控制器参数整定方法2009-10-21 840
-
用MATLAB仿真分析自抗扰控制器的整定参数2009-09-10 699
-
基于SMEC的PID控制器参数优化整定方法2009-03-15 756
全部0条评论

快来发表一下你的评论吧 !
