

超声波传感器测距方法详解
描述
在日常生产生活中,超声波测距传感器主要应用于汽车的倒车雷达、及机器人自动避障行走、建筑施工工地以及一些工业现场例如:液位、井深、管道长度等需要自动进行非接触测距的场合。目前有两种常用的超声波测距方案。一种是基于单片机或者嵌入式设备的超声波测距系统,一种是基于CPLD(Complex Programmable Logic Device)的超声波测距系统。想要了解超声波测距传感器的相关应用设计首先我们必须了解超声波传感器测距的工作原理。
超声波传感器测距工作原理
超声波传感器是将超声波信号转换成其他能量信号(通常是电信号)的传感器。超声波是指频率大于20 kHz的在弹性介质中产生的机械震荡波,其具有指向性强、能量消耗缓慢、传播距离相对较远等特点,因此常被用于非接触测距。由于超声波对液体、固体的穿透本领很大,尤其是在阳光不透明的固体中。超声波碰到杂质或分界面会产生显著反射形成反射成回波,碰到活动物体能产生多普勒效应。,因此超声波测距对环境有较好的适应能力,此外超声波测量在实时、精度、价格也能得到很好的折衷。
目前超声波测距的方法有多种:如往返时间检测法、相位检测法、声波幅值检测法。其原理是超声波传感器发射一定频率的超声波,借助空气媒质传播,到达测量目标或障碍物后反射回来,经反射后由超声波接收器接收脉冲,其所经历的时间即往返时间,往返时间与超声波传播的路程的远近有关。测试传输时间可以得出距离例如:
假定s为被测物体到测距仪之间的距离,测得的时间为t/s,超声波传播速度为v/m·s-1表示,则有关系式(1)
s=vt/2 (1)
在精度要求较高的情况下,需要考虑温度对超声波传播速度的影响,按式(2)对超声波传播速度加以修正,以减小误差。
v=331.4+0.607T (2)
式中,T为实际温度单位为℃,v为超声波在介质中的传播速度单位为m/s。
超声波测距传感器工作原理
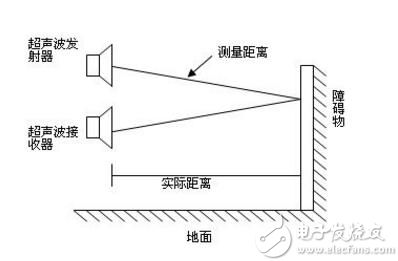
超声波测距原理是通过超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播时碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。而超声波测距传感器,采用超声波回波测距原理,运用精确的时差测量技术,检测传感器与目标物之间的距离,采用小角度,小盲区超声波传感器,具有测量准确,无接触,防水,防腐蚀, 低成本等优点。超声波测距传感器常用的方式是1个放射头对应1个接收头,也是多个发射头对应1个接收头基于超声波测距的简单、易于操作和无损伤等特点所以
要测得超声波往返的时间,即可求得距离。这就是超声波测距传感器的工作原理。
对于超声波测距工釆网小编向大家推荐一款韩国Hagisonic 超声波测距传感器模块 - HG-C40U。
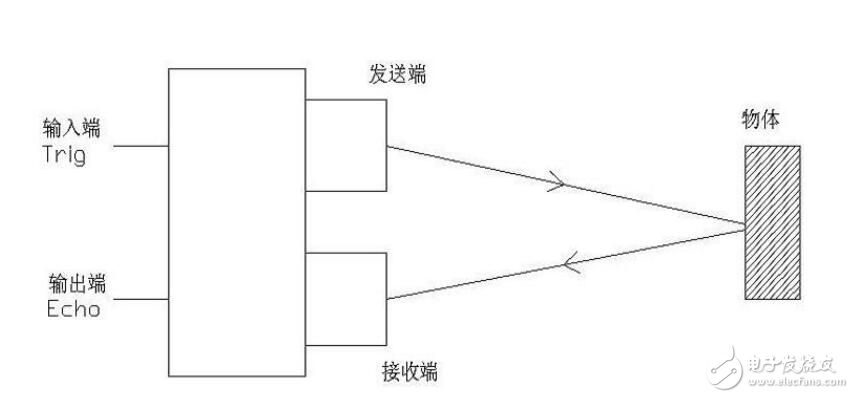
超声波测距传感器模块拥有两种可选传输模式,分别是自由运行模式:有电源时,传感器自身发送触发和突发信号(用于基本应用);外部触发模式:外部系统(控制器或处理器电路)控制触发信号用于高级应用,这两种模式适用于各种用途,此外该传感器还涉及两种输入电源一种是低压(5V)适用于处理器电路另一种是高压(12V)适用于控制器可测量到障碍物的距离为3.5m (at 5V)、5m (at 12V),并用UART通讯发送数据,分辨率在5mm以内。另一方面在各种场合用户可根据自身环境选择不同的设置模式比如自由运行/ UART触发/外部触发设置等,同时也可根据测UART通讯波特率设定决定是否设置使用环形缓冲区,输出信号具有高性能ASIC芯片,保证稳定传输、灵敏接收等特点,因此传感器到PC的通讯使用‘接口板’(RS232,功率调节器)数据显示使用PC上的监控程序(可用超级终端)可以将实际接收的超声波实时放大用UART(ASCII, mm)输出距离数在根据实时将探测信号转为TTL电平矩形信号(方波)。
- 相关推荐
- 超声波传感器
-
超声波传感器测距电路2008-10-20 0
-
基于超声波传感器的测距系统设计2009-12-15 0
-
超声波测距原理2012-04-25 0
-
超声波测距2016-04-18 0
-
基于STM32超声波测距设计的合集2018-09-05 0
-
超声波传感器及应用2018-10-29 0
-
超声波传感器测距系统如何设计2020-04-23 0
-
超声波传感器的优势及原理2020-06-19 0
-
超声波传感器选型指导详解2021-03-24 0
-
超声波测距实验2009-03-07 7334
-
超声波传感器,超声波传感器是什么意思2010-03-03 3756
-
超声波位移传感器与激光测距仪/测距传感器之间有何区别2023-04-21 1880
-
超声波传感器的工作原理 超声波传感器的应用2024-01-18 1742
-
超声波测距原理 超声波测距离传感器接线方法2024-01-22 2460
全部0条评论

快来发表一下你的评论吧 !
