

磁致伸缩位移传感器算法介绍
电子说
描述
磁致伸缩位移传感器是一种高精度的位移测量设备,广泛应用于工业自动化、机械制造等领域。其工作原理基于磁致伸缩效应,即某些材料在受到磁场作用时会发生长度变化。下面我将详细介绍磁致伸缩位移传感器的工作原理及其算法。
工作原理
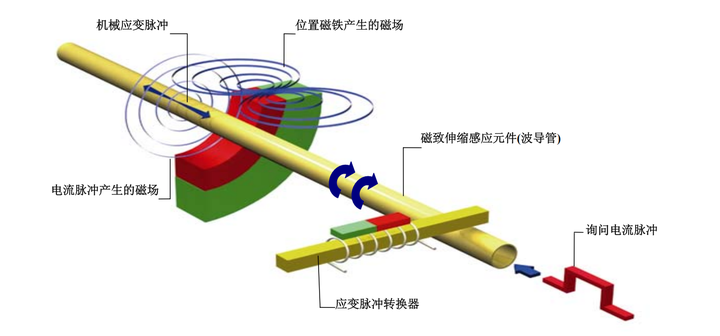
磁致伸缩位移传感器原理
磁致伸缩材料:磁致伸缩位移传感器的核心是一根由磁致伸缩材料(如铁镍合金)制成的波导丝。
激励脉冲:传感器内部有一个电子电路,会周期性地向波导丝发送一个电流脉冲,这个脉冲会在波导丝中产生一个环形磁场。
位置磁铁:在波导丝外部,有一个可以移动的位置磁铁,它代表了被测物体的位置。
超声波信号:当环形磁场与位置磁铁的磁场相互作用时,在波导丝上会产生一个瞬时的扭转应力波(也称为超声波)。
检测时间差:这个超声波沿着波导丝传播到传感器的另一端,被一个拾音器(通常是压电晶体)检测到。通过测量从发送电流脉冲到检测到超声波的时间差,可以计算出位置磁铁的位置。
算法介绍
磁致伸缩位移传感器的主要算法是基于时间差的测量来确定位置。具体步骤如下:
1、发送激励脉冲:电子电路向波导丝发送一个电流脉冲,记为 ( t_0 )。
2、检测超声波信号:位置磁铁产生的超声波信号被拾音器检测到,记为 ( t_1 )。
3、计算时间差:计算从发送电流脉冲到检测到超声波信号的时间差 (△t = t_1 - t_0 )。
4、转换为位移:由于超声波在波导丝中的传播速度 ( v ) 是已知的,可以通过以下公式计算位置磁铁的位置 ( L ): L = v×△t
具体实现
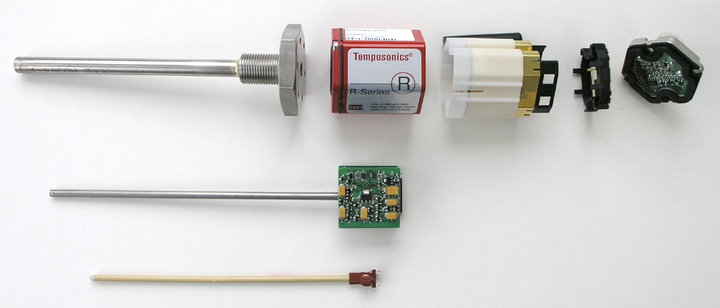
磁致伸缩位移传感器硬件
硬件部分:包括波导丝、位置磁铁、激励电路、拾音器等。
软件部分:主要负责控制激励脉冲的发送、接收超声波信号、计算时间差并转换为位移值。
误差校正
磁致伸缩位移传感器误差校准
为了提高测量精度,通常还需要进行一些误差校正:
温度补偿:超声波在不同温度下的传播速度会有所不同,因此需要对温度进行补偿。
非线性校正:实际应用中,波导丝的传播速度可能会有轻微的非线性变化,需要通过校准数据进行修正。
总结
磁致伸缩位移传感器通过测量超声波在波导丝中的传播时间来确定位置磁铁的位置。其核心算法是基于时间差的测量,并通过已知的传播速度将其转换为位移。通过适当的误差校正,可以实现高精度的位移测量。
本文转载于深圳市博尔森科技有限公司官网:http://www.brsen.com
审核编辑 黄宇
-
磁致伸缩位移传感器在大坝监测的应用2025-07-27 502
-
STM32的磁致伸缩智能位移传感器研究2025-03-20 1035
-
磁致伸缩位移传感器隔离电路2025-03-01 818
-
磁致伸缩位移传感器工作原理及结构2024-06-19 3487
-
磁致伸缩位移传感器—精准的位移测量解决方案2024-04-23 1589
-
磁致伸缩位移传感器原理及特征2023-02-14 3060
-
磁致伸缩位移传感器运用了什么技术?2019-11-06 1971
-
磁致伸缩位移传感器原理及应用2019-10-01 10408
-
采用磁致伸缩技术的位移传感器2018-12-04 1691
-
磁致伸缩位移传感器的发展情况2016-06-24 4099
-
基于单片机的磁致伸缩位移传感器的应用2010-09-09 1037
-
磁致伸缩位移传感器综合知识2009-11-25 2269
全部0条评论

快来发表一下你的评论吧 !
