

你听说过嘛?用树莓派机器人远程逗猫...
描述
简单的Raspberry Pi网络控制的视频直播机器人!
硬件清单
硬件模块
Raspberry Pi Zero 无线 × 1
Raspberry Pi 摄像头模块 × 1
4AA 电池盒 ×1
USB 电池 (4.000 mAh) × 1
SparkFun Dual 双H桥电机驱动器 L298 × 1
跳线 (通用) × 1
2WD 机器人汽车底盘套件 ×1
项目背景
gatoBot
"gato"在西班牙语中意为"猫"
这款基于Raspberry Pi Zero W的网页遥控机器人专为"打扰"家猫设计,兼具实时视频监控功能。
关于Raspberry Pi
Raspberry Pi是由英国Raspberry Pi基金会开发的单板计算机系列,旨在推广基础计算机科学教育。其初代产品意外走红,被广泛应用于机器人等非目标领域。外设(如键盘、鼠标、外壳)需单独购买,部分官方或第三方套装会包含配件。
核心功能
网页端遥控(赋予你"远程吓猫"的超能力)
实时视频流传输
电路连接示意图
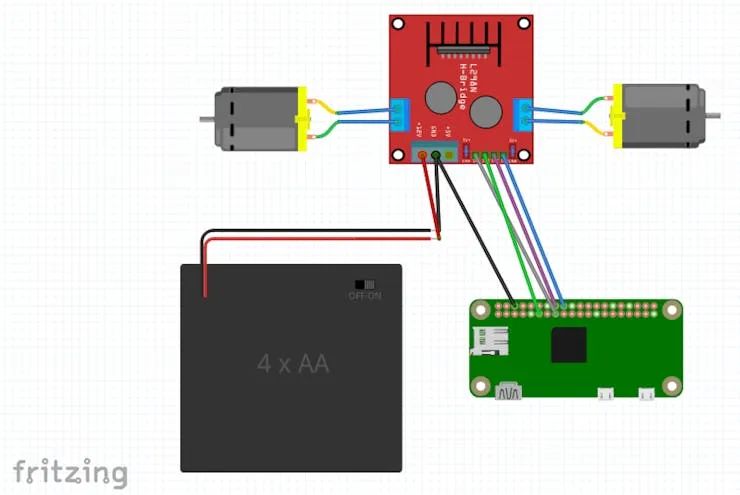
USB电池组和Raspberry Pi摄像头省略
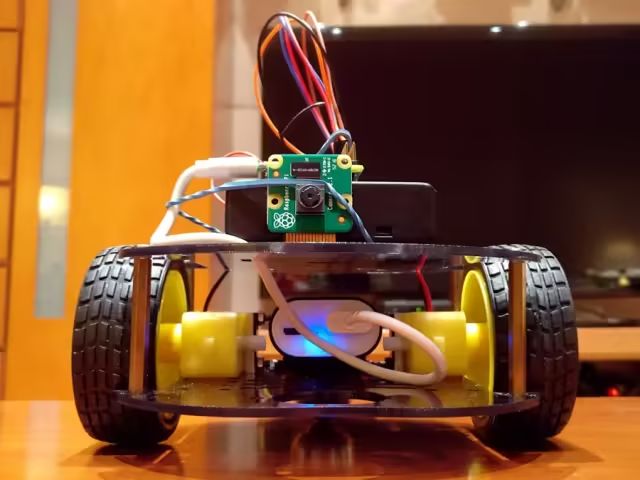
一旦你把所有的东西都放在一起,你的“机器人”看起来或多或少会像这样:
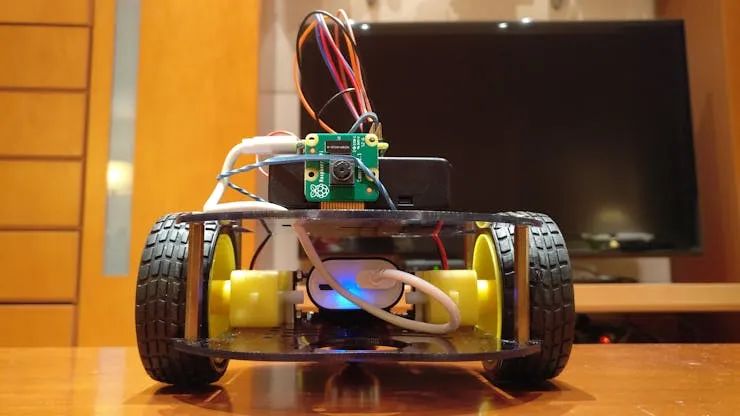
gatoBot正面展示
马达方向调试技巧
您可能会发现马达没有按照您预期的方向运行。如果发生这种情况,请检查motors.py中的以下行,并使用LOW和HIGH参数。
def backward(): GPIO.output(Motor1A,GPIO.HIGH) GPIO.output(Motor1B,GPIO.LOW) GPIO.output(Motor2A,GPIO.HIGH) GPIO.output(Motor2B,GPIO.LOW) def forward(): GPIO.output(Motor1A,GPIO.LOW) GPIO.output(Motor1B,GPIO.HIGH) GPIO.output(Motor2A,GPIO.LOW) GPIO.output(Motor2B,GPIO.HIGH) def turnLeft(): print("Going Left") GPIO.output(Motor1A,GPIO.HIGH) GPIO.output(Motor1B,GPIO.LOW) GPIO.output(Motor2A,GPIO.LOW) GPIO.output(Motor2B,GPIO.HIGH) def turnRight(): print("Going Right") GPIO.output(Motor1A,GPIO.LOW) GPIO.output(Motor1B,GPIO.HIGH) GPIO.output(Motor2A,GPIO.HIGH) GPIO.output(Motor2B,GPIO.LOW)
网页控制界面
Raspberry Pi启动并接入WiFi后,L298N模块由4节AA电池供电。通过浏览器访问http://raspberry_ip:8000/即可遥控机器人。

- 相关推荐
- 热点推荐
- 机器人
- Raspberry Pi
- 树莓派
-
你可能从未听说过 9 款令人惊叹的树莓派应用!2025-08-07 1401
-
能够精准定位的树莓派机器人!2025-05-17 1804
-
树莓派机器人船构建2023-07-10 936
-
如何使用树莓派开发智能机器人控制系统2021-12-23 4843
-
听说过用单片机开发的小程序吗?2021-07-14 939
-
你真正了解过树莓派吗?2021-03-20 5847
-
树莓派简介2019-08-06 3251
-
树莓派语音识别机器人(下)2016-01-20 34484
-
树莓派RFID音乐机器人2016-01-18 12913
-
有关树莓派制作机器人平台的探索2015-11-10 4510
-
树莓派打造视频监控机器人Verybot2014-09-18 112851
-
变形乐高玩具变形和树莓派一起玩出乐高机器人!2014-09-02 11907
-
图片新闻:你没听说过的新款智能机介绍2012-09-11 5763
全部0条评论

快来发表一下你的评论吧 !
