

ALVA空间智能视觉喷涂方案技术解析
描述
在高端制造业中,喷涂工艺的精度与效率直接决定了产品的可靠性与生产成本,当前已有诸多行业通过对喷涂的智能化升级,实现工业制造的链路优化。
此前,我们已系统性地介绍了 ALVA 空间智能视觉喷涂方案,本期我们将从技术角度解析其创新逻辑与实施价值。
01空间信息采集:物理到数字的精准映射
喷涂智能化的前提是数据的精确获取与建模,ALVA 空间智能视觉喷涂方案通过 RGB 摄像头扫描工件表面,以 0.2mm 精度捕捉铆钉、接缝等微观结构纹理,生成三维模型,这一步骤为后续智能决策提供了“数字地基”。
随后,通过将扫描数据与原始 CAD 模型比对,系统构建出与物理实体完全同步的数字孪生体,将物理世界的复杂性转化为算法可理解的逻辑单元。
既避免了人为误差,又将建模效率提升数倍,尤其适用于飞机蒙皮等大面积复杂表面的快速数字化喷涂。
02AI 路径规划:分层策略与动态优化的平衡
喷涂路径规划需在效率与精度间找到最佳平衡点,ALVA 通过双重技术实现这一目标:
语义分割与动态避障协同
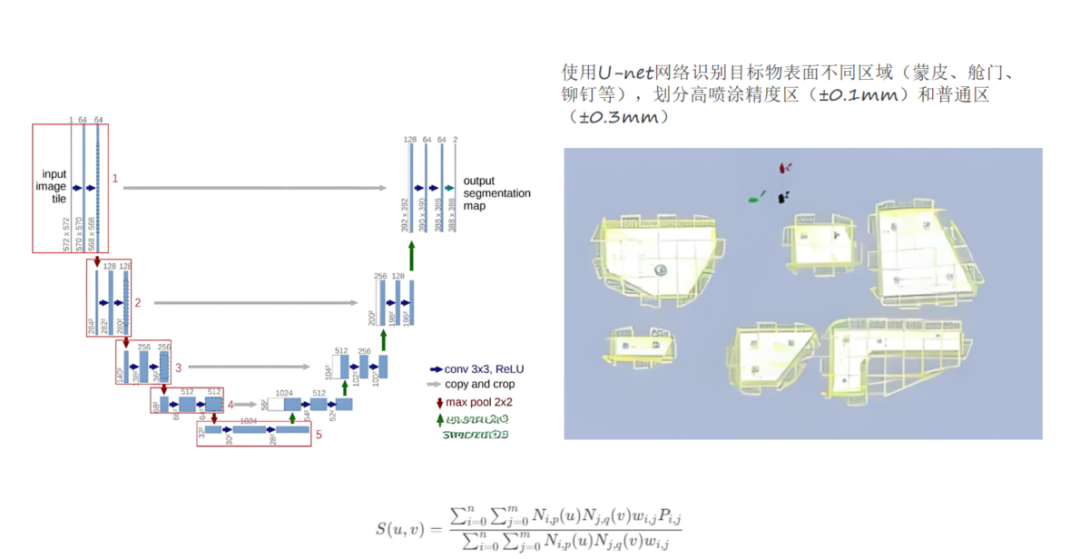
基于U-Net 网络的语义分割,将工件划分为高精度区(±0.1 mm)与普通区(±0.3 mm),并在不同分区动态调整喷涂速度。
此外,基于强化学习训练的机械臂避障逻辑,能够在 <100ms 内响应环境变化,避开天线、传感器等突出部件。
这种“分区管理 + 动态避障”的策略,既避免“一刀切”的资源浪费,又保障了关键区域的喷涂质量。
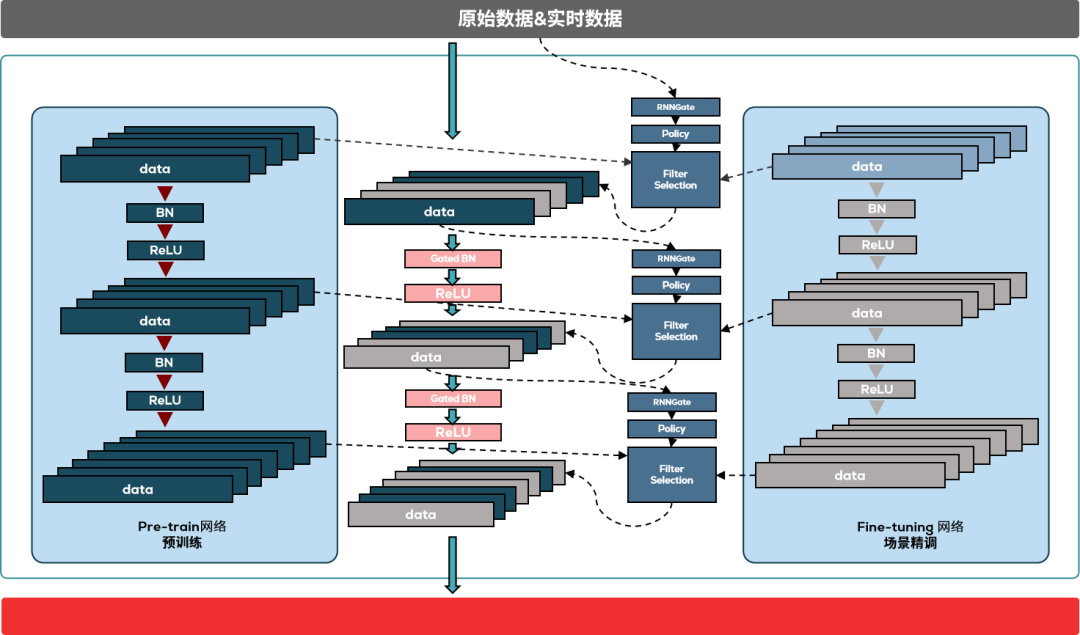
*相关技术示意图
多目标优化与曲面的智能适配
喷涂参数(流量 200-400ml/min、距离 15-30cm、速度 0.5-2m/s等)通过多目标优化模型求解,最终实现涂料消耗降低 10%-30%,同时将厚度误差压缩至 <5µm。
针对机翼前缘等复杂曲面(曲率半径 <0.5m),系统自动调整喷枪角度(±15°)与移动轨迹,解决了传统喷涂中因曲面曲率变化导致的涂层堆积或过薄问题,实现成本与质量的精细化管控。
03实时动态调整:毫秒级响应的智能闭环
喷涂环境的动态性(如车间气流、温度波动)要求系统具备实时纠偏能力,ALVA 则通过两类技术构建闭环控制:
多传感器融合监测
红外传感器以 1µm 分辨率实时反馈涂层厚度,结合气溶胶粒子计数器检测雾化颗粒直径(20-50µm),动态调节喷涂气压(0.3-0.7MPa)。
这一组合在监控结果的同时捕捉过程数据,为优化喷涂提供全维度输入。
*相关技术示意图
高速控制与扰动应对
系统每50ms 更新一次路径规划,并通过算法修正机械臂轨迹,实时“感知-决策-执行”的闭环频率,提供了远超传统控制的响应能力。
04协同作业:分布式 AI 与人机共融
大型工业场景中,单一设备的效率存在明显上限,ALVA 的智能视觉喷涂方案通过两类协同技术突破瓶颈:
多机械臂协同 6 台机械臂通过分布式 AI 算法分配任务,间距控制精度达±2cm,避免喷涂重叠。
不仅使整体效率提升 40%,同时也降低了单点故障风险。
人机协作的“智能增强”模式
AI标记进气道等复杂结构供人工复检,将干预耗时减少 70%,同时通过后台界面直观显示涂层质量数据。
这种“机器主操作、人类主决策”的模式,既发挥 AI 的效率优势,又保留人工在复杂场景下的灵活性。
05验证与迭代:数据闭环驱动的持续进化
智能化系统的生命力在于持续学习与适应,ALVA通过双轨机制实现这一目标:
虚拟仿真:十万种场景的压力测试
在进行喷涂工作前,系统在数字孪生平台模拟 10 万种不同工况,涵盖极端温度、机械臂故障等场景,验证算法在绝大多数场景下的鲁棒性。
强化学习迭代:数据驱动的工艺优化
在实际应用中,单架次飞机喷涂时将采集不低于 2TB 的实际喷涂数据,涵盖环境参数、涂层质量等全维度信息,并据此持续优化避障逻辑与路径规划效率。
目前,ALVA 这一技术框架已向汽车制造、能源装备等领域延伸,并逐渐成为工业喷涂的通用解决方案。
除喷涂方案以外,ALVA 还提供焊接、锁付等重要环节的空间智能视觉解决方案,通过空间智能视觉与算法的深度融合,实现工业制造的自我进化与价值跃升。
关于 ALVA Systems
ALVA Systems 专注增强现实/人工智能等空间智能相关技术的自主创新,成立十余年始终深耕底层算法研发与优化,拥有自研算法引擎并拓展丰富创新产品与应用,是全球空间智能领域的核心供应商。
在工业领域,公司重点致力于基于空间智能技术和制造业的深度结合应用,经过充分实践,形成了丰富完善的产品线,让不同行业企业利用既有资源敏捷实现 AI 价值,Anyone can AI ! 开拓了广域的应用空间,是国际工业物联网与“数字孪生”解决方案的领跑者。
-
ALVA亮相2025中国国际数字经济博览会2025-10-18 1491
-
ALVA推出“ AI + 空间计算智能运维平台2025-10-12 2198
-
ALVA空间智能视觉锁付方案重塑精密制造未来2025-07-10 1125
-
ALVA空间智能技术助力管廊巡检新变革2025-05-28 863
-
ALVA空间智能视觉焊接方案重构工业焊接范式2025-05-15 1108
-
ALVA空间智能喷涂方案破解传统工业喷涂问题2025-05-08 1114
-
ALVA解锁工业喷涂高效精准新标杆2025-04-10 1195
-
空间智能技术助推新型工业化升级2025-03-17 1025
-
ALVA空间智能视觉产品赋能工业企业发展2025-02-27 1099
-
智能拖动示教喷涂机器人:技术革新与未来展望2024-12-12 1628
-
如何助力智能工厂升级?三大机器视觉方案一览2023-02-28 883
-
喷涂机器人的发展趋势2021-03-10 3170
-
电源柜控制开关柜导电铜排绝缘粉末喷涂技术与原理2020-05-26 778
-
中科信软招聘机械加工、喷涂技术兼职讲师2016-08-24 2117
全部0条评论

快来发表一下你的评论吧 !
