

一文看懂步进电机整步半步什么意思
电子说
描述
步进电机驱动器是什么
步进电机驱动器是一种将电脉冲转化为角位移的执行机构。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速和定位的目的。
步进电动机和步进电动机驱动器构成步进电机驱动系统。步进电动机驱动系统的性能,不但取决于步进电动机自身的性能,也取决于步进电动机驱动器的优劣。对步进电动机驱动器的研究几乎是与步进电动机的研究同步进行的。
步进电机驱动器的原理
步进电机驱动器的原理,采用单极性直流电源供电。只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。图1是该四相反应式步进电机工作原理示意图。
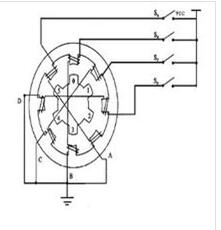
四相步进电机步进示意图 开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。 当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。单四拍与双四拍的步距角相等,但单四拍的转动力矩小。八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
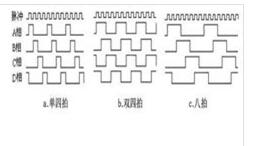
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c所示。驱动器相当于开关的组合单元。通过上位机的脉冲信号有顺序给电机相序通电使电机转动。
步进电机的步数是什么
步数/圈==其实也就是步进电机走一圈所用的步数。
你看的别人驱动器细分 步数/圈。其实相对的就是几细分。
比如。 200步数/圈 也就是走一圈需要200步。走1步就是1.8度。
如果是两相的步进电机的话。这个200步数/圈就是无细分。走的是一个整步。
因为1.8度角是两相步进电机的基本步距角度。
如果调到.2000步数/圈 也就是走一圈需要2000步。走1步就是0.18度。
因为两相步进电机的基本步距角是1.8度。而现在走1步是0.18度。
也就是 1.8/0.18=10 这个10就是10细分。
当你调到2000步数/圈就是相当与调到了10细分。
步进电机驱动器的模式
步进电机驱动器有三种基本的步进电机驱动模式:整步、半步、细分。其主要区别在于电机线圈电流的控制精度(即激磁方式)。
1、整步驱动
在整步运行中,同一种步进电机既可配整/半步驱动器也可配细分驱动器,但运行效果不同。步进电机驱动器按脉冲/方向指令对两相步进电机的两个线圈循环激磁(即将线圈充电设定电流),这种驱动方式的每个脉冲将使电机移动一个基本步距角,即1.80度 (标准两相电机的一圈共有200个步距角)。
2、半步驱动
在单相激磁时,电机转轴停至整步位置上,驱动器收到下一脉冲后,如给另一相激磁且保持原来相继处在激磁状态,则电机转轴将移动半个步距角,停在相邻两个整步位置的中间。如此循环地对两相线圈进行单相然后双相激磁步进电机将以每个脉冲0.90度的半步方式转动。山社电机供应的所有的整/半步驱动器都可以执行整步和半步驱动,由驱动器拨码开关的拨位进行选择。和整步方式相比,半步方式具有精度高一倍和低速运行时振动较小的优点,所以实际使用整/半步驱动器时一般选用半步模式。
3、细分驱动
细分驱动模式具有低速振动极小和定位精度高两大优点。对于有时需要低速运行(即电机转轴有时工作在60rpm以下)或定位精度要求小于0.90度的步进应用中,细分型步进电机驱动器获得广泛应用。其基本原理是对电机的两个线圈分别按正弦和余弦形的台阶进行精密电流控制,从而使得一个步距角的距离分成若干个细分步完成。例如十六细分的驱动方式可使每圈200标准步的步进电机达到每圈200*16=3200步的运行精度(即0.1125°)。
总的来说:在整步运行状态下,每输入一个脉冲,电机轴的角位移是一个步矩角,在半步运行状态下,每输入一个脉冲,电机轴的角位移是半个步矩角。步进电机最好不使用整步状态,整步状态时振动大。
步进电机驱动器的型号
F3922、F3722L、F3722、F3722A、F3722M、F368、F3522A、F3522H、F3522、F2611、F268C、F875、F556、F256B、F265、F255、F235B、F245、F223
1、F表示步进驱动器
2、表示相数,2表示两相,3表示3相
3、5表示电流5安培
4、22表示电压220V
- 相关推荐
- 步进电机
-
步进电机三种驱动方案介绍2011-02-17 0
-
步进电机相数和步进电机的基本步距角2015-12-28 0
-
如何理解步进电机的电机固有步距角2016-01-19 0
-
步进电机驱动器三种基本驱动模式2018-08-31 0
-
步进电机中的整步和半步是什么意思2019-04-12 0
-
步进电机中的整步与半步2019-06-20 0
-
步进电机总结 资料分享2021-06-30 0
-
两相步进电机和四相步进电机的不同点? 相关资料分享2021-07-08 0
-
使用TM4C123和DRV8833步进电机驱动器以整步和半步模式驱动步进电机2022-09-22 0
-
A4988步进电机驱动器是如何工作的?2023-03-10 0
-
L298驱动步进电机2010-09-23 2864
-
一文解析步进电机三种驱动方式的优缺点2018-04-25 7594
-
步进电机驱动器工作模式_步进电机驱动器电路图2019-10-01 9114
-
降低步进电机振动、噪音的解决方法2019-12-10 9565
-
步进电机整步、半步、细分波形理解2023-03-22 583
全部0条评论

快来发表一下你的评论吧 !
