

红外军工应用
电子说
描述
在众多的温度测量工具中,研究人员和工程师为何应考虑热成像?
热成像相机在军事研究和测试范围应用中的最大优势之一是,它们能够在无需接触被测目标物体的情况下进行成像和记录热数据。许多高端研发和科学级相机还提供了速度、空间分辨率、触发和高级定时功能,用于表征快速热瞬态和高速移动的目标。热像仪还可以检测到最细微的温度变化,能够测量小于 0.02°C(<20 mK)的温差。红外相机还允许您以您想要的方式全面分析数据,无论您使用研发软件还是 SDK 解决方案。
红外相机能够生成清晰、实时、高分辨率的图像。红外探测和冷却系统的发展使得红外相机制造商能够制造出更准确、速度更快、分辨率更高的热成像相机——正是研发和科学应用所需的系统类型。
在过去的十年中,红外相机的科学型号产品线不断扩展,提供了对各种红外波段、多种探测器材料、快照速度、温度范围等的经济实惠的访问。连接性和软件集成选项也得到了扩展,因此科学家可以轻松地将红外系统集成到他们的研究项目中。
本文将为您提供对研发和科学热成像的全面了解——从红外相机的工作原理到它们如何使您的项目受益。

了解红外热成像
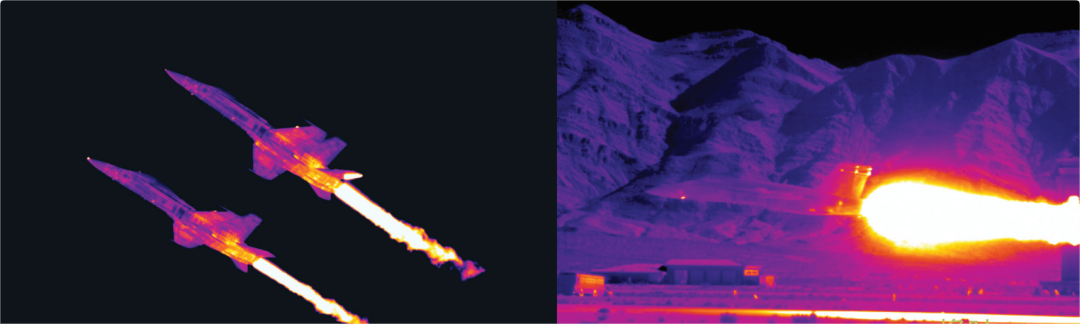
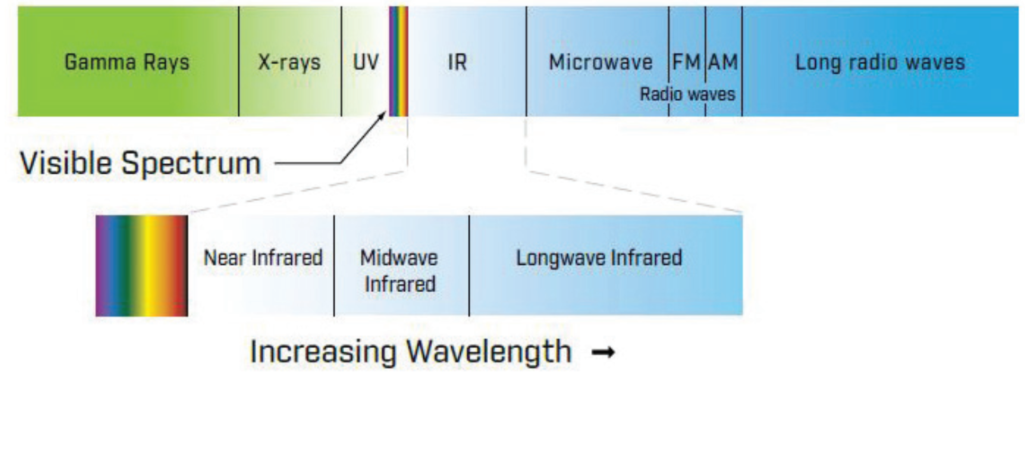
热成像相机的工作方式与普通数码相机非常相似——只不过,它们记录的是红外光谱段的辐射,而不是可见光。
热成像相机收集视野内物体发出的红外辐射(A)。光学元件(B)将辐射聚焦到探测器(C)上,形成焦平面阵列(FPA)。一些相机使用斯特林微型制冷机(D)来保持 FPA 处于低温。FPA 将信息发送到传感器电子元件(E)进行图像处理。电子元件将来自 FPA 的数据转换为可以流式传输到计算机的格式。
在远处图像中寻找分辨率
像任何相机一样,热像仪也有光学元件,用于执行各种功能,从将图像聚焦在探测器上到过滤掉不需要的波长。一些为红外(IR)范围设计的光学元件的细节与在可见光下工作的光学元件不同,这可能导致对其能力的误解。一个普遍存在的误解是,变焦镜头在红外线中效果不佳,它们太复杂、太昂贵,而且不值得投资。
事实上,变焦镜头是可用的、价格实惠的,并且可以成为在红外线中运行的高性能红外相机系统的重要和有用组成部分。变焦镜头为用户提供了良好的功能,使他们能够跟踪和成像远处的物体,或者更详细地查看附近的物体。凭借连续的变焦,它们提供了时间-空间-位置信息,使研究人员能够分析移动物体的特性。
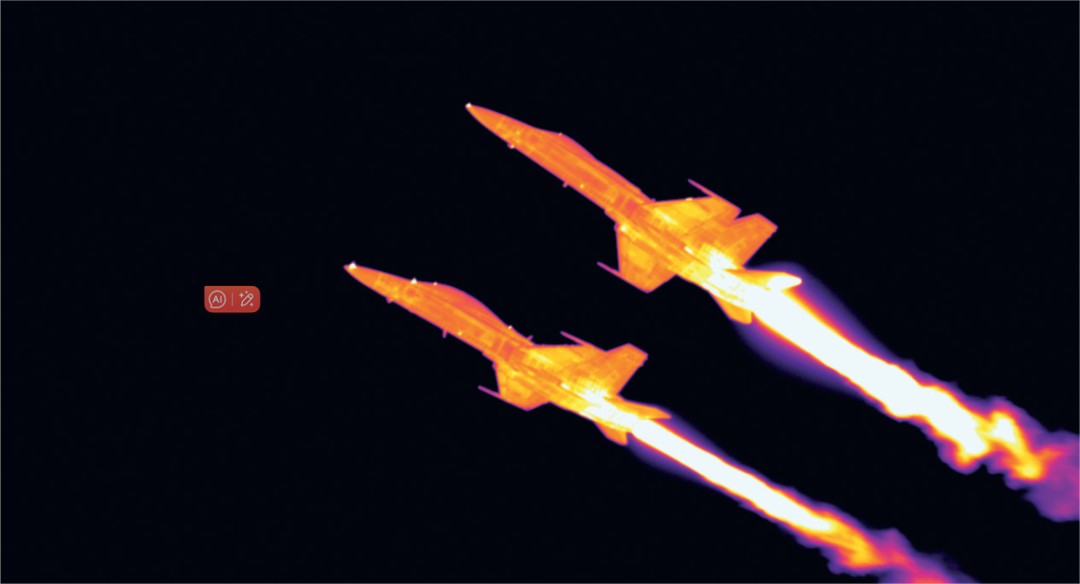
在军事测试范围中工作的研究人员经常对移动物体进行远程测量,例如数公里外飞行的飞机。他们可能还想查看更近但更小的物体,例如迫击炮弹。这两种类型的测量都需要一个具有高光学分辨率的系统,包括镜头。
实现这种功率需要在目标上尽可能多地获取像素。因此,拥有大量像素的探测器很重要。小像元间距和镜头的长焦距也有助于在目标上获取尽可能多的像素。
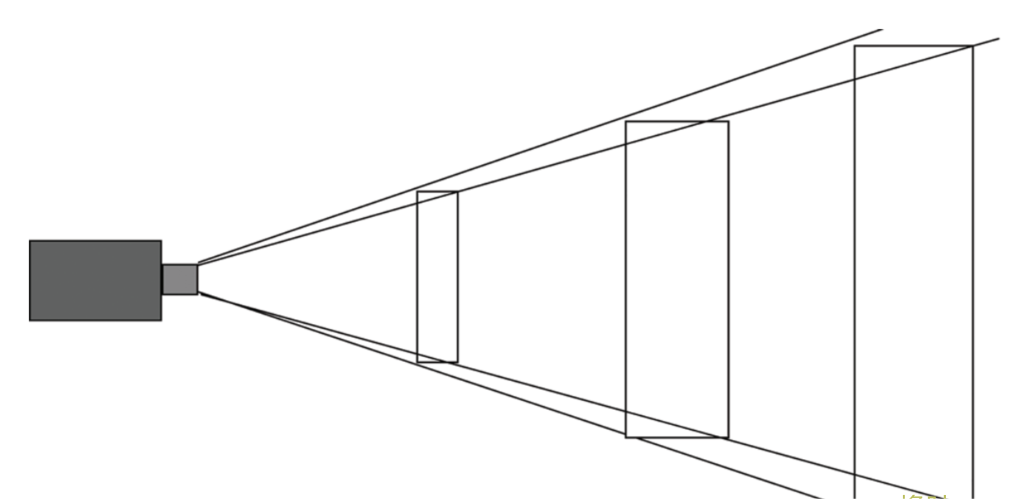
瞬时视场
任何遥感设备的空间分辨率都以瞬时视场来衡量。想象一个从探测器上的像素向被成像物体投射的锥体。锥体远端的面积就是瞬时视场(IFOV),即每个单独像素能够看到的区域大小。像素越小,焦距越长,该区域就越小,因此物体在视场中所占比例就越大。这就好比用肉眼看飞机与通过双筒望远镜看飞机的区别。你的眼睛看到更广阔的天空,但飞机看起来更小,而通过双筒望远镜,你看到的天空更少,但飞机的图像更大。
幸运的是,更小的像素和更长的焦距都适用于红外相机。像素间距——一个像素中心到下一个像素中心的距离——在过去的老式相机上是 15 µm,但已经缩小到 12 µm甚至更小,减少了 20%。与此同时,虽然镜头的焦距曾经最多达到大约 300 mm,但现在可以提供从 120 到 1200 mm 的连续变焦。这种组合使得对更小或更远的物体能够获得清晰的焦点。
顺便说一下,提供更高空间分辨率的小像素与高速成像中所需的像素大小正好相反。在高速成像中,积分时间(IR 中的曝光时间等效物)很短,因此相机需要快速捕获尽可能多的光,这就需要更大的像素。幸运的是,大多数远程应用不需要高速,因为远处的移动物体在探测器上的表观位置变化速度比近处的物体慢,因此小像素是可以接受的。
使用 TSPI(时间-空间-位置信息)
镜头的焦距,即镜头与其反射镜之间的距离,是远程成像的关键要素。知道焦距可以告诉用户他们正在成像的物体的距离。当研究一个朝向或远离观察者的移动物体(例如飞机)时,具有连续变焦和自动对焦组件特别有用。它可以跟踪焦距的每一个时间点,并将信息作为伴随图像的元数据保存,为物体提供关键的 TSPI。知道有效焦距可以告诉用户物体有多远,因此他们可以通过物体在视场中所占的百分比来判断物体的大小。
对于 TSPI 的时间部分,一些相机有输入端口,可以连接提供 IRIG-B 时间码的设备。IRIG(代表跨范围仪器组)是一个允许设备同步的标准。IRIG-B 每秒提供 100 个脉冲信号。将 IRIG-B 与连续变焦相结合,用户可以在任何给定时间知道他们与目标的距离。
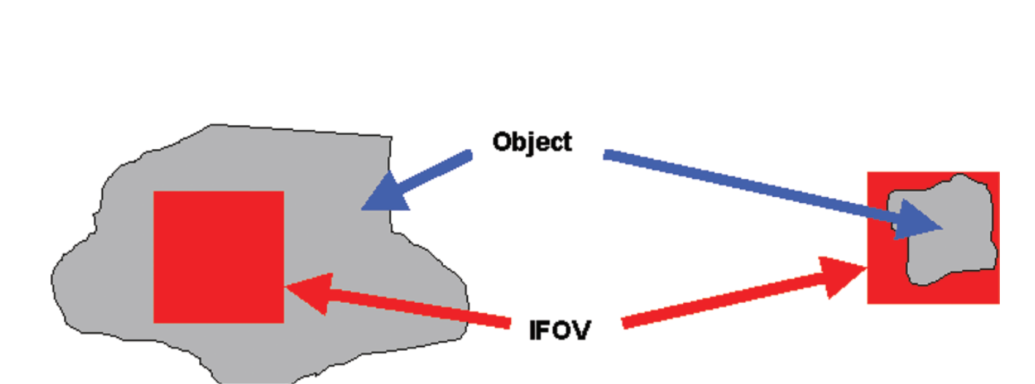
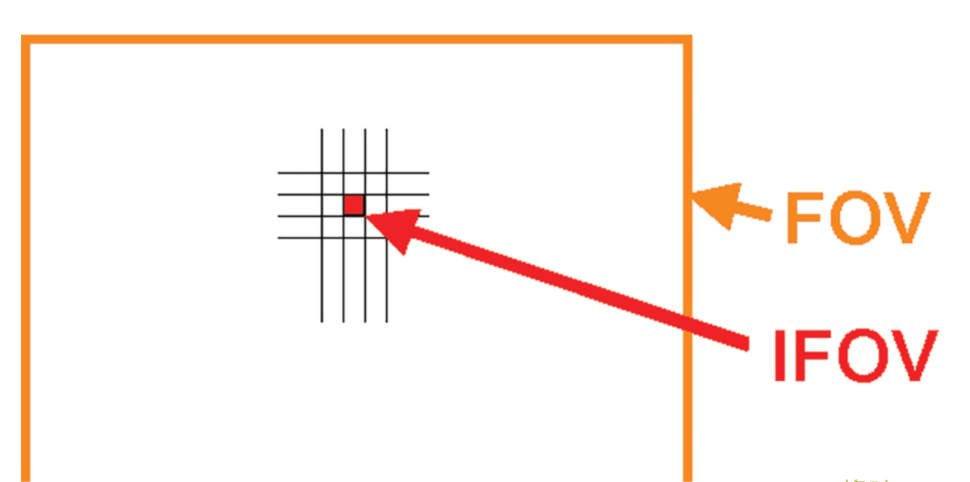
相机的视场(FOV)会随着观察距离的变化而变化。IFOV(红色方块)相对于物体大小。相机的空间分辨率(IFOV)由其镜头和 FPA 配置决定。
稳定安装
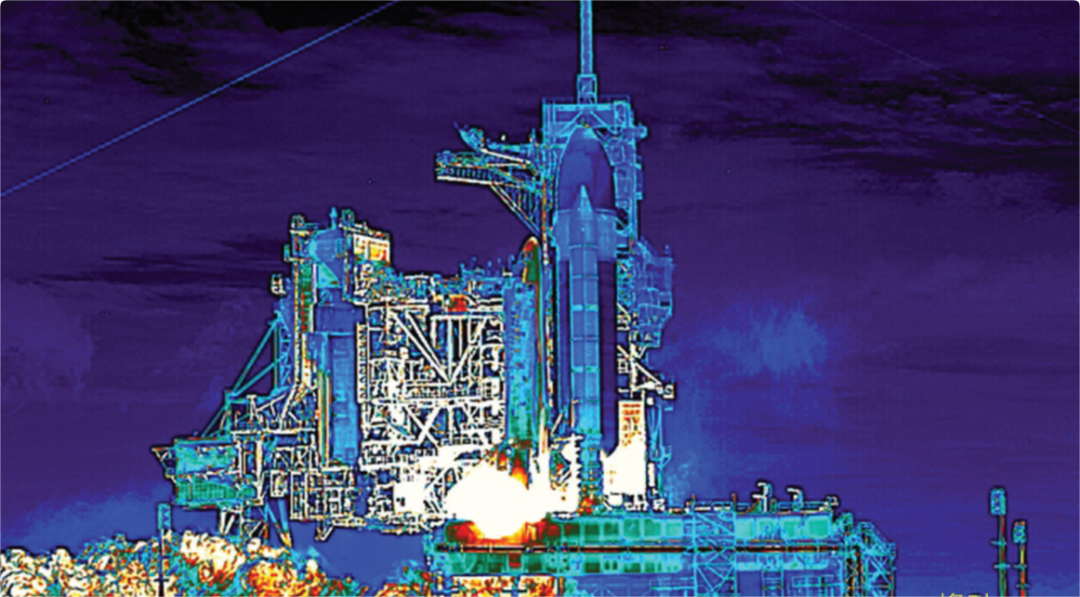
当然,当相机使用高倍率对准物体进行成像时,它必须是一个稳定平台的一部分。即使相机只有半毫米的微小移动,也可能导致成像区域发生巨大变化,甚至可能完全错过目标。高精度跟踪安装座可用于稳定相机并将其指向正确方向。
事实上,一些用户主要希望将具有高倍率的红外相机用作跟踪系统的一部分。软件允许他们注意图像的特定部分,并确定它从一帧到下一帧的位移量,例如,当飞机穿过视野时。然后它将这些信息反馈给跟踪安装座,以纠正相机的位置并保持其对准移动目标。
有价值的工具
空间分辨率是军事测试范围中红外相机的一个重要考虑因素。它是像素大小的函数——越小越好——以及变焦镜头的焦距,应该尽可能长。许多人一直认为变焦镜头在性能上有限制,价格昂贵,并且只提供短焦距。事实上,它们是价格实惠的,可以达到许多毫米的长度,并提供一系列能力,例如自动对焦和连续变焦,这些能力提供了跟踪移动物体或对远处目标进行分析所需的信息,这些目标会改变位置,以及更小且更近的物体。连同定时输入,相机可以在图像元数据中记录时间-空间-位置信息,允许用户精确计算辐射度和其他重要特性。作为提供稳定性和跟踪信息的系统的一部分,具有高空间分辨率的红外相机可以成为测试范围能力的宝贵补充。
源自网络
审核编辑 黄宇
-
军工电子设备EMC试验标准和实用技术分享2023-07-16 6062
-
全国回收军工IC 高价收购军工IC2021-10-26 923
-
回收军工IC 收购军工IC2021-06-08 1154
-
军工产品的六性原理、概念、策划与设计2021-04-24 2391
-
回收军工ic 深圳收购军工IC2021-01-09 733
-
5962-8953201XA 南京军工IC订货2020-09-22 572
-
AD7845TQ国宇航芯军工IC价格2020-01-08 1052
-
5962-87591053X代理AD军工IC优势订货***2019-11-28 389
-
国外军用电子元器件质量等级与国内对应情况一览表2018-11-27 5939
-
长虹彩电成黑榜常客 军工品质如何军工?2016-12-30 5283
-
【TL6748 DSP申请】红外手持测温设备平台升级2015-09-09 2191
-
外军先进无人地面传感器2011-02-15 568
-
外军ATE/ATS技术的发展趋势2009-07-15 1305
全部0条评论

快来发表一下你的评论吧 !
